

v90伺服调试框架
一,使用FB286,287 ,3#4#报文,通过MC_home等TO通讯模块实现伺服的实时控制
二,EPOS功能(重点)
1,数据计算(位置和速度控制)
(1)位置控制:单位lu,1lu=1um;例子:默认设置丝杆转一圈需要10000lu,如果通过程序输出目标位置信息是20000lu时,丝杆转动两圈;
(2)速度控制:重点记住,★★速度的基础单位时1000lu/min★★,需要在给与参数的位置数据上X1000,时间单位上如果需要转换为秒的单位,需要/60。
(3) 加减速设置,单位为lu/s²
(4)急动限制,单位lu/s³,实时改变加速度,使加速方程从X=4=>y=x(穿过与原点的直线),目的是时,速度变化从一次方程,变为二次方程,从Y=X=》Y=X²,如下图
(5)软硬限位:硬限位接线到V90,而不是PLC,确保相应的实时性
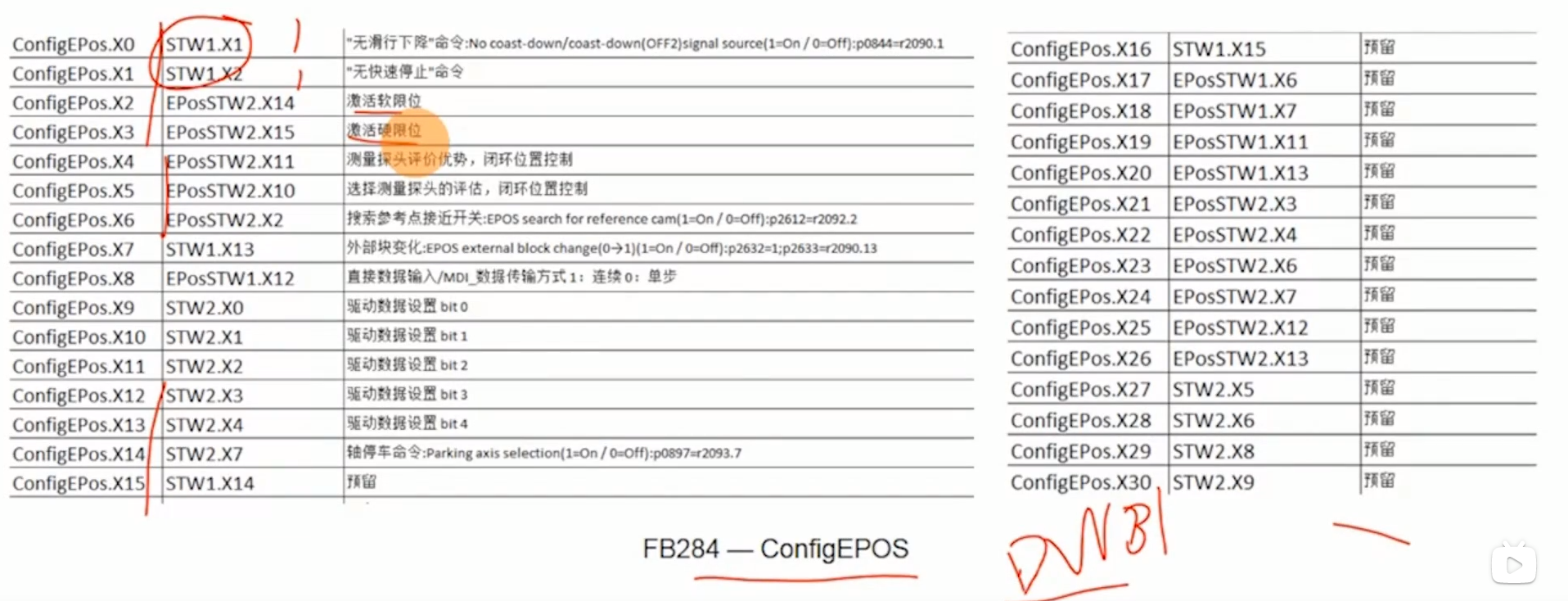
(6)FB284,报文111,ConfigEPOS,如下
(7)扭矩,速度限制:起保护作用



【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· winform 绘制太阳,地球,月球 运作规律
· AI与.NET技术实操系列(五):向量存储与相似性搜索在 .NET 中的实现
· 超详细:普通电脑也行Windows部署deepseek R1训练数据并当服务器共享给他人
· 上周热点回顾(3.3-3.9)
· AI 智能体引爆开源社区「GitHub 热点速览」