
[二维成像与三维重建]系列(4) 小心成像有畸变
关键词:影像畸变 径向畸变 切向畸变 畸变模型
作者:李二
日期:28/03/2020 - 01/04/2020
"本系列均是写给计算机视觉和摄影测量的初学者和非主流从业人员,比如一些遥感研究生们。"
小孔成像模型的
数学形式是完美的,然而真实的相机成像过程并非严格遵从小孔成像模型,这一期我们来看看真实的薄透镜成像有什么问题,在成像几何中如何考虑。话不多说,看李二道来。
1. 理想相机成像
理想相机成像即严格遵循小孔成像模型:无镜头,无畸变
李二再一次来到了**吃饭大学,开始了他的兼职教授的第二次课程。我当然是紧随其后,以便中午能蹭顿便饭,因为听说该大学西北餐厅的手抓羊肉一绝呀。
李二开始上课:上回说到,唐王被困淤泥河,薛仁贵前去救驾.... (致敬刘宝瑞先生)
第三排第末列的女孩突然打断:二先生,你走错了吧,这不是茶馆。
李二恍然大悟:奥奥奥,对对对,昨天晚上睡不着,听了一夜相声。好,上节课我们留了个扣子,我说真实相机成像
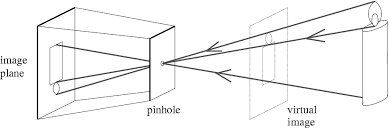
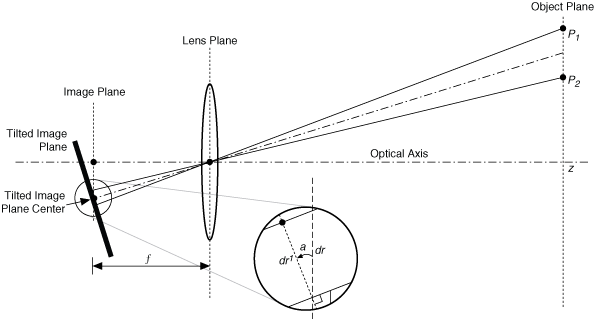
并非完美地严格地遵从小孔成像模型,那么不妨先看看这种理想的小孔成像模型到底理想在什么地方呢。如下图所示:所谓
理想主要体现在两个方面:
成像平面与焦平面(即小孔所在平面)严格平行; 像点与物点的连线(即光线或)严格准直,不存在弯曲; 大家记住理想成像的这两个
特点,然后我们看看真实相机成像是什么样的。
2. 真实相机成像的问题 - 畸变
真实相机的几何构造与理想情况有差异:有镜头,有畸变
真实相机因为
制造工艺的原因,它的几何构造与理想情况有差异,涉及两个方面:
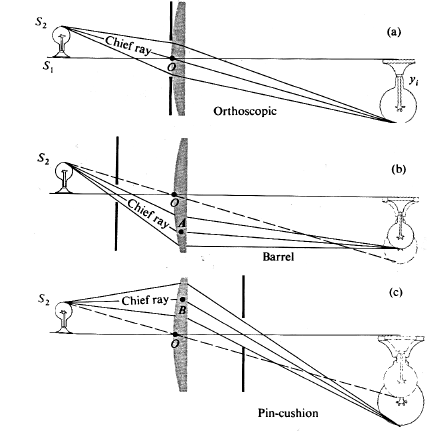
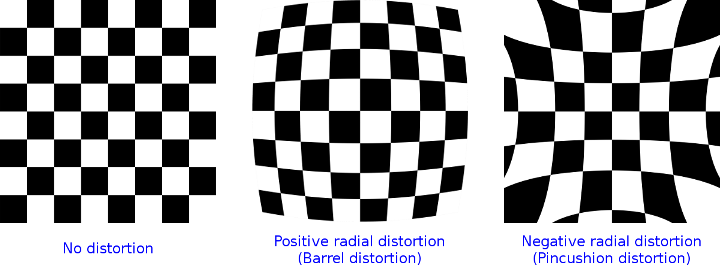
透镜与孔径光阑的相对位置:本质上是 孔径光阑和镜片位置的关系决定了畸变。该类畸变的特点是畸变沿着透镜半径方向分布,称为径向畸变,径向畸变主要包括桶形畸变 barrel和枕形畸变 pincushion两种。针孔模型中,一条直线投影到像平面仍是直线。而摄像机的透镜往往使得真实环境中的直线投影为曲线“curvilinear” 。越靠近图像边缘,这种线性越明显。邮寄实际加工制作的透镜往往是中心对称的,这使得不规则的畸变通常径向对称。径向畸变随着焦距的减小而增加。
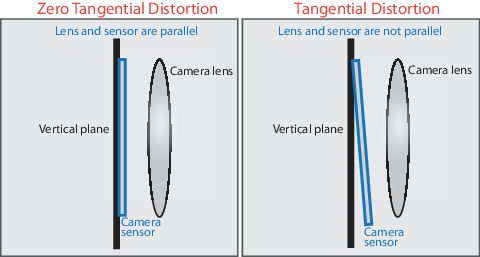
相机的组装工艺中透镜和成像面不严格平行:这一工艺问题造成的畸变,畸变沿切线方向发生变化,称为 切向畸变。其实,切向畸变又分为薄透镜畸变和离心畸变等,具体内容就不细讲了。
李恒大神告诉我说:搞懂径向畸变这块需要几何光学的基础知识,我表示没有学过,也不懂,不过看官们似乎大致知道怎么回事就行了。
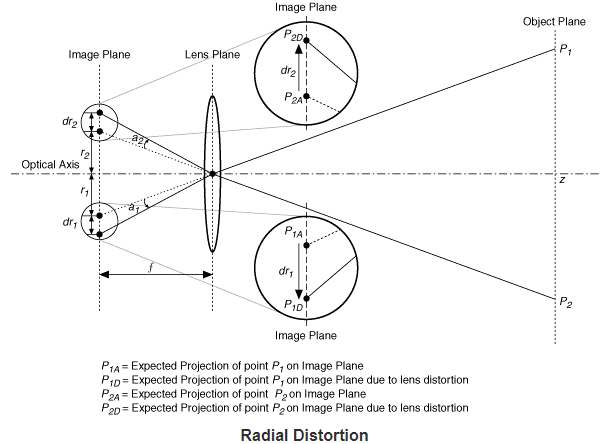
我们假设成像平面上的任意一点 ,写成极坐标的形式为 ,其中 表示点 与坐标系原点之间的距离, 表示与水平轴的夹角。因此:
径向畸变可以看成坐标点沿着长度方向发生了变化,也就是距离原点的长度 发生变化;切向畸变可以看成坐标点沿着切线方向发生变化,也就是水平角 发生变化。
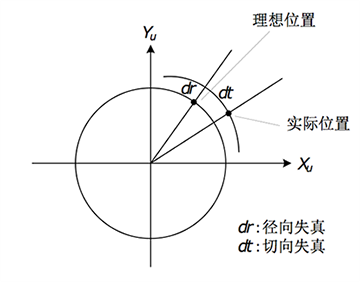
(诸位看官,请仔细理解这几幅图的含义)
3. 畸变校正模型
畸变的数学模型与畸变校正公式
李二看大家毫无反应,也不生气也不着急,慢悠悠说道:我默认大家都理解了啊(这话怎么听着这么熟悉呢,嘿嘿)。
开始敲重点了其实我们的目的不是为了了解畸变而了解畸变,而是为了了解之后对畸变进行校正,消除畸变的影响。我们上面讲解了畸变的类型与产生原理,那么如何对这些
畸变进行建模呢?
研究人员们构建了很多模型,这里呢我们不对模型的推导进行讲解(李二说这话时心里有点发虚,因为他自己也不知道这些模型是如何推导而来的)。不妨直接看看一下畸变的数学模型是什么样子的。
假设无畸变时点 在图像物理坐标系中的坐标为,畸变后该点的坐标为 ,则二者的畸变数学模型为:
->径向畸变数学模型<-
呈现多项式关系,一般采用三个参数 ,当然视情况而定,如果畸变很小,可以少用一个高阶参数。
->切向畸变数学模型<- 具有两个参数。
联合公式(1)和(2),我们可以通过5个畸变参数校正畸变,也就是找到这个点在像平面的正确位置。
->畸变校正公式<-
李二如同很多老师那般,开启了典型的问话模式:大家还记得上节课中所讲的
总体变换矩阵吗?
我在下面小声嘟囔:老师们怎么向来都爱这么问,学生肯定不记得呀,有几个学生会复习呀。我们学生的记忆时间似乎比鱼长那么一点点。
李二似乎听到了似的,便道:不记得没关系,我挑个重点说一下。我们由
相机坐标系转换为图像物理坐标系的公式是:
由
图像物理坐标系转换为图像像素坐标系的公式是:
(各位看官可以与上一期对照着看,上一讲采用矩阵的形式,这里采用代数的形式)
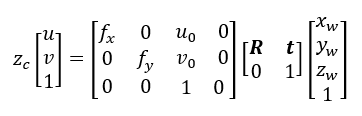
李二突然又敲起重点了:上面的公式(4-5)无疑是正确的,只是稍微有点扭捏。如果咱们的相机内参数()或者() 都放在一个矩阵或者一组公式中多好呀,否则每次变换用到内参数时,都要用以上两组公式,现在我们不妨把内参数都写到一组公式中。则有以下形式:
由相机坐标系转换为 归一化的图像物理坐标系的公式是:
(大家看,这个转换是不是少了一个比例因子 ,也就是说 并不是图像物理坐标系 中的坐标了,而是一个归一化产物,量纲是倍数,而不是 了)
由 归一化的图像物理坐标系转换为图像像素坐标系的公式是:
(估计各位看官看到这可能都不想看了,可以理解,李二这家伙,废话太多,似乎生怕学生不理解似的。 冷笑一声,哼,你再怎么讲我TM也不理解啊,算了,行有不得,反求诸人吧,还是李二讲的问题。)
李二又在duang duang duang (咋就是打不出Duang这个字!),理论部分的最重的重点来了:大家且忍耐数分钟之不关闭本网页,我下面有一推导,欲使图像畸而复正,讲解幽而复明(改自姜伯约)。
我们已知的是畸变后的图像ImgD(ud,vd)(就是你们的相机拍照后得到的图像),要得到正常的(没有畸变的)图像ImgR(u,v),就要通过畸变模型建立二者之间的映射关系。
假设正常图像的坐标 ,如果能知道其在畸变图像中的坐标 ,就能够从畸变图像中 位置处取得像素值DN值,并放在正常图像的 处,这样把每个正常图像的像元坐标都遍历一遍(注意:此时只是一个空矩阵哦),就能够输出正常图像了(注意:这时的正常图像才是肉眼可见的图像,比如图像中显示的是“李二的阳台”)。
开始推导喽,非常简单,李二为了让大家看的更明白,不厌其烦地多写了些字(其实只要联立公式(7) (3) (7)即可,但是我们还是再明确一下): 由公式(7),我们由正常图像中的像素坐标 转换为正常图像的归一化图像物理坐标系中的坐标 :
由公式(3),我们将正常图像的归一化图像物理坐标系中的坐标 转换为畸变图像中的归一化图像物理坐标系中的坐标
继续由公式(7),我们将畸变图像中的归一化图像物理坐标系中的坐标 转换为畸变图像中的像素坐标 :
举个例子,正常图像的
(5,5)坐标点,经上述推导后,对应的是畸变图像(5.3,5,4)点,那么就将畸变图像中(5.3,5,4)点的像素值假设DN=128,赋值在正常图像的(5,5)坐标点上。由于畸变图像的像素坐标都是整数,因此需要进行一定的插值处理(如:双线性内插)。
李二终于松了一口气,好啦,幽而复明了没有,我的后主们?
却不料这次有个爱思考的家伙站起来:二先生,我基本明白了,不过有个问题是:您讲的是由正常影像的坐标推出畸变图像的坐标。为什么不倒过来做呢?也就是由畸变图像的坐标推导至正常图像的坐标,这样思路不是更直接吗?
李二很高兴:这是个好问题!不这样做的原因是:虽然思路更直接,但是操作有点费劲。因为如果反过来,公式(3)就需要改写,畸变参数就不一样了,而通过 标定方法确定畸变参数时得到的是公式(3)中的参数。如果非得反过来,也不是不行,就是相当费劲而已。
正好下课铃响了,李二说:就讲到这吧,内容太多也不太好。
我高兴异常,暗自道:手抓羊肉的干活去(写着写着哈喇子就留下来了,哪位看官要是过意不去,联系请我吃饭哦,哈哈)
4. 后记
本人有点小伤心,因为把前几篇短文拿给一所谓正经师兄(嘻嘻)去看时,得到了看完第一篇就不想继续看了的’高度评价‘。无妨,要听的进不同意见,不过猜测他本身的农学背景对于这一计算机视觉知识似乎并不感冒。
本人又有些高兴,经过多方探索,终于准备将这些随笔短文或技术文档放在干净的博客园中了(2020.03.31)。然在博客园中,鱼与熊掌不可兼得,为保证markdown格式更为优美,我用了专门的格式工具,但是却把公式转换为图片,且转换的不好;若想保持latex公式优美,直接用博客园的MD编辑器造成其他格式又不好看。难啊!
昨天将第一篇博客发到朋友圈中,意外得到很多看官的赞扬。写这种科普知识不累吗?李二性喜分享,分享优异,不畏劳也。
其实写这些东西还是挺不容易的,因为需要保证自己讲所有的知识点完全理解,保证别给诸位看官们造成错误信息,我导师说过的一句话,一直言犹在耳老师的基本素质之一是:别误人子弟。再次拜谢诸位看官。


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· AI与.NET技术实操系列:向量存储与相似性搜索在 .NET 中的实现
· 基于Microsoft.Extensions.AI核心库实现RAG应用
· Linux系列:如何用heaptrack跟踪.NET程序的非托管内存泄露
· 开发者必知的日志记录最佳实践
· SQL Server 2025 AI相关能力初探
· 震惊!C++程序真的从main开始吗?99%的程序员都答错了
· winform 绘制太阳,地球,月球 运作规律
· 【硬核科普】Trae如何「偷看」你的代码?零基础破解AI编程运行原理
· 上周热点回顾(3.3-3.9)
· 超详细:普通电脑也行Windows部署deepseek R1训练数据并当服务器共享给他人