
CARLA——The External Sensor Interface (ESI)
The External Sensor Interface.pptx - Google 云端硬盘
笔者对部分自己关注的内容进行了摘抄以及验证
Introduction
我们展示了外部传感器接口(ESI),这是一种新的电磁传感器模拟器,目前正在积极开发中,我们预计将在未来几个月发布第一个版本。
新的外部传感器接口的设计集中在两个方面:物理精度和灵活性。在整个演讲中,我们将描述获得模拟所需的所有关键部分,其中物理得到正确表示,就像我们需要考虑的所有现象和环境建模一样。ESI的另一个重要部分是使用的灵活性。我们与Unreal Engine完全分离,以便完全控制模拟。我们可以控制模拟时间尺度,利用所有可用的硬件,还可以选择与主CARLA模拟同步的方式。此外,我们需要补充一点,拥有一个外部模拟器打开了对LiDAR和RADAR传感器进行完全独立模拟的可能性。
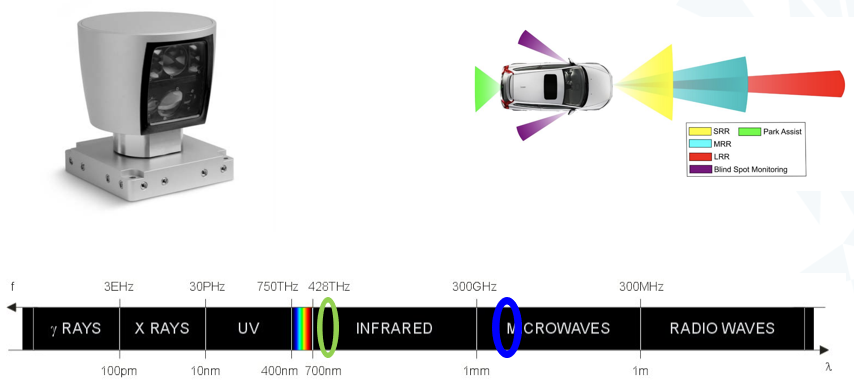
ESI是电磁传感器的模拟器。当然,我们主要关注的是目前在自动驾驶中使用的除摄像头之外的主要传感器:LiDAR和RADAR。因此,我们特别关注这些频率,但构建了一个适用于整个电磁频谱的通用框架。为此,我们要小心物理学,因为在EM光谱的不同部分会出现许多不同的现象。
最重要的现象之一是电磁辐射与物体表面的相互作用或介质之间的分离。
- 在两种介质之间的界面处,考虑反射和透射(如果两者都是透明的)及其对入射光线角度的依赖性非常重要。
- 同样重要的是发生在物体表面的电磁吸收。
另一方面,对于逼真的模拟来说,不仅要考虑电磁辐射与表面的相互作用,还要考虑辐射在参与介质中传播时会发生什么。这里要考虑的重要现象包括体积吸收和电磁辐射与大气中的悬浮粒子(如灰尘或水滴)相互作用时产生的散射。
对于像雷达这样的大波长,考虑波物理也非常重要。例如衍射,可以避开障碍物并显示它们不在视线范围内的物体。
总之,我们可以将要建模的现象分为两类。我们可以将辐射视为射线(几何光学)的那些,以及我们需要考虑辐射的波动性质的那些。
大气中电磁辐射的散射很大程度上取决于辐射波长和悬浮颗粒的大小。
正如我们所提到的,波物理现象对于准确模拟雷达至关重要。在图像中,多普勒效应可以通过在物体反弹后返回传感器的波的频率变化来告诉我们传感器与场景中另一个物体之间的相对速度。
The External Sensor Interface
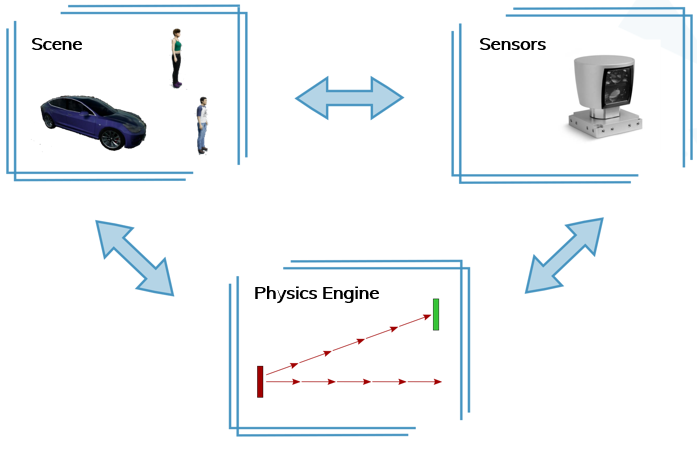
图中是外部传感器接口三个最重要模块的简化方案。场景管理器处理所有演员和他们之间的关系。传感器管理器允许我们在场景中规划的传感器的完整配置。物理引擎负责计算所有物理相关的交互。它被设计为一个可以实现完全不同的物理的接口。
传感器模块有两种主要的配置模式:
- 商业传感器将能够满足,因此用户只需将它们添加到需要的地方
- 可以通过配置文件添加新传感器,在该配置文件中可以设置所有相关参数
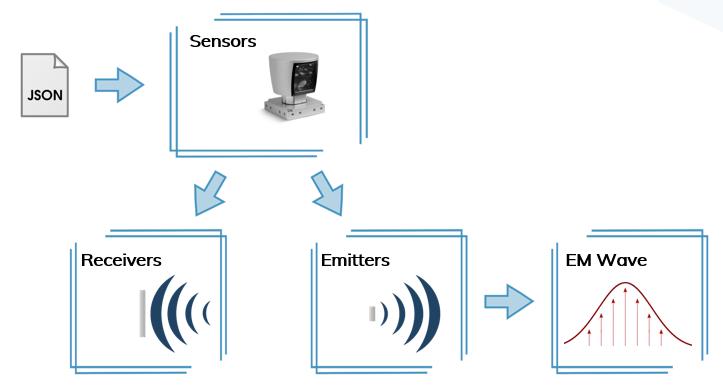
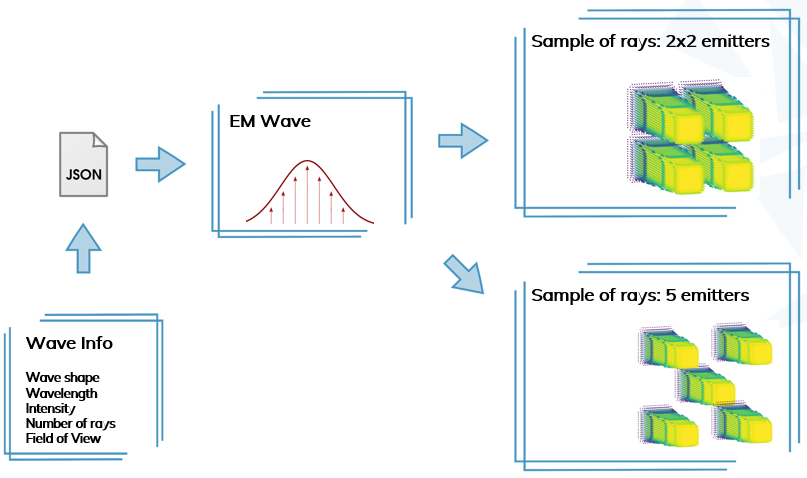
我们传感器的发射器产生的电磁波可以通过配置文件的信息进行完整的配置。在传感器创建期间,会生成一个带有波重要信息的EM Wave对象。这包括其形状、波长、强度和视野等数据。该对象将被传递到物理引擎,该引擎将波对象采样成一组光线,用于路径跟踪器。在幻灯片中,可以看到两个示例,它们都模拟了每个发射器有441条射线的激光雷达波(超高斯波),一个发射器采用2x2网格,另一个采用交叉配置。
这是对ESI总体结构的简要介绍。除了我们已经描述的Sensor、Actor和Physics模块之外,注释I/O Updater也很重要。该模块负责根据用户指令或CARLA手动创建其余模块的所有实例。
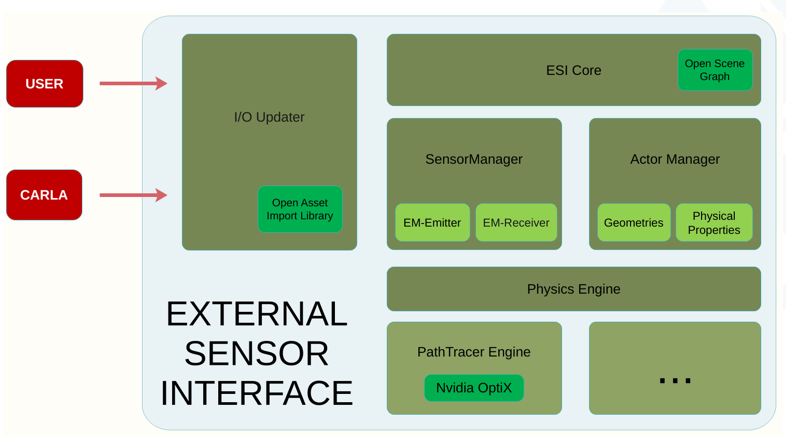
关于 ESI的一般结构的一些注释。它旨在为计算的不同部分(如传感器模拟、数据处理和更新)提供多线程结构。这对于利用当前的多核CPU以及允许同步和异步模式很有用。传感器可通过配置文件完全配置。得益于NVIDIA OptiX和ESI设计,我们可以利用所有可用的硬件来加速传感器的模拟。
The Path Tracer Engine
Environmental Modelling
Summary and Conclusions


