Neurorobotics—A Thriving Community and a Promising Pathway Toward Intelligent Cognitive Robots
郑重声明:原文参见标题,如有侵权,请联系作者,将会撤销发布
FRONTIERS IN NEUROROBOTICS, (2018): 42
Abstract
Neurorobots是一种机器人,其控制已根据大脑的某些方面进行建模。由于大脑与身体如此紧密地耦合并位于环境中,因此神经机器人可以成为以整体方式研究神经功能的强大工具。它也可能是开发具有某种程度生物智能的自主系统的一种手段。本文提供了我对这个领域的看法,指出了一些具有里程碑意义的事件,并讨论了它的未来潜力。
Keywords: brain-based devices, evolutionary robotics, embodied cognition, cognitive robotics, Neural Darwinism, neuromorphic engineering
INTRODUCTION
早在这个领域还没有名字之前,我就已经参与神经机器人学20多年了。我想我会花时间和空间来思考这个领域是如何开始的,以及我认为它的发展方向。许多人认为Neurorobotics始于Gray Walter的Tortoises1,它是在数字时代之前建造的,具有由简单模拟电路控制的基本光传感器和碰撞检测器(图1)。然而,这些简单的大脑产生了看似复杂的行为,我们可以称之为智能。
该领域的另一个开创性时刻是著名神经解剖学家Valentino Braitenberg的Vehicles思想实验(Braitenberg, 1986)。这本简短的书的每一章都介绍了一个简单的机器人或车辆,这是神经科学的一课。例如,通过将左侧光传感器连接到这些假想机器人的右侧电机,反之亦然,Braitenberg描述了对侧和同侧连接之间的差异及其对行为的影响。使用Vehicles,他通过这些简单的思想实验引入了感觉运动回路、抑制和效价(valence)的概念。
我还认为Rodney Brooks在90年代初期的工作对于Neurorobotics的建立很重要。此时,Good Old Fashion AI (GOFAI)在"智能"机器人领域占据主导地位(Kuipers et al., 2017)。继GOFAI之后,这些机器人拥有具有代表性的现实世界模型、推理引擎和基于规则的系统来指导机器人的行为。Brooks写了两篇非常有影响力的文章,使这个领域发生了翻天覆地的变化:Intelligence without reason (Brooks, 1991a)和Intelligence without representation (Brooks, 1991b)。这个想法与Grey Walter相似,即感觉运动整合导致了看似自然的行为。Brooks引入了包容式架构作为触发原始行为并在它们之间进行仲裁的一种手段。他们的机器人像昆虫一样四处奔波,避开障碍物,寻找物体,并对环境的变化做出反应。后来,包容式架构被用来创建像人类一样移动或与人类自然交互的机器人。与当时的其他机器人不同,它们"快速、廉价且不可控"2。就像生物有机体一样。他们的工作表明,低级进程的选择和交互可以导致智能行为。从神经科学的角度来看,这与体内平衡行为的皮层下处理有相似之处,例如自主活动、饥饿、体重调节、神经内分泌功能、生殖行为、攻击性和自我保护(Parvizi and Damasio, 2001; Venkatraman et al., 2017)。
这是我的神经机器人故事开始的背景(大约1997年)。我是一个刚毕业的博士,试图弄清楚我想在哪里进行研究。当时,我正在与Giorgio Ascoli合作研究树突形态的重要性(Ascoli et al., 2001a, b)。Giorgio是一位才华横溢的科学家,而我是一名相当熟练的计算机程序员。因此,我们两个人的结合导致了早期的工作——生成和可视化树突树。虽然我的博士学位是计算神经科学专业的,但我有计算机科学背景。更具体地说,在进入学术界之前,我在工业界从事实时和嵌入式系统的研究。与计算神经解剖学和神经信息学领域一样令人兴奋的是,我对自然条件下生物体的行为更感兴趣。我认为我的行业经验可能适用于新的研究领域。
1998年末,我看到加利福尼亚州拉霍亚神经科学研究所凯克机器心理学实验室的博士后职位空缺。我对这个想法很感兴趣,并联系了联系人Olaf Sporns。在与Olaf进行了令人鼓舞的谈话后,他建议我去神经科学研究所进行一次访问。
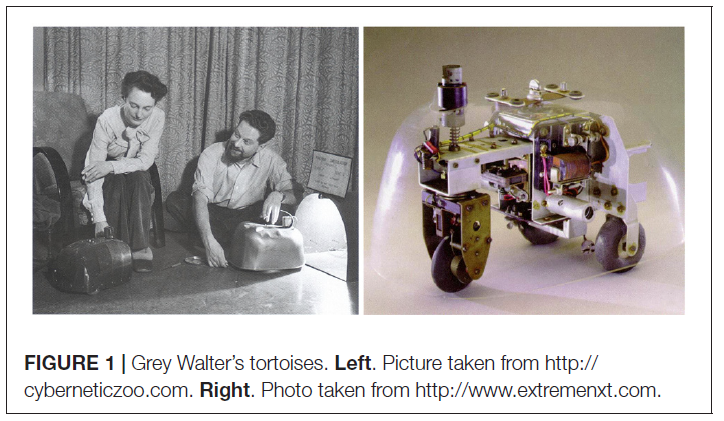
神经科学研究所是一个独特的地方。领导是诺贝尔奖获得者Gerald Edelman。除了获得诺贝尔奖的免疫学工作外,他还介绍了一种称为神经达尔文主义的神经系统理论:神经元群选择理论(Edelman, 1987, 1993)。该理论表明,在发育过程中通过突触修剪选择神经回路,并在成年期通过重入连接选择神经元组。对于神经机器人学来说,重要的是将环境信号与神经元群联系起来的价值系统概念,这导致选择对生存很重要的行为。由于这种联系,或者正如Edelman所说,"大脑是具身性的,而身体是嵌入环境中的",他们的团队开发了Darwin系列的基于大脑的设备(Reeke et al., 1990; Edelman et al., 1992)。推动这项工作的另一个短语是"世界是一个未标记的地方",这意味着必须通过经验而不是监督来选择感知类别。这些基于大脑的设备是具有控制其行为的大规模神经网络的机器人3(图2)。然而,这些并不是当时流行并成为今天的深度神经网络的前馈输入层→隐藏层→输出层神经网络。基于大脑的设备的神经网络具有类似于生物神经网络的解剖细节。有感觉流、自上而下的连接、双向区域之间的远程连接,以及大脑区域内的局部横向兴奋和抑制。
当我访问神经科学研究所时,他们已经开发了Darwin V,这是一种基于大脑的设备,带有人工神经系统,可以学习偏好并预测对象的价值(Almassy et al., 1998)。这是我梦想做的事情,但他们比我领先了10年,与当时其他团队不同。
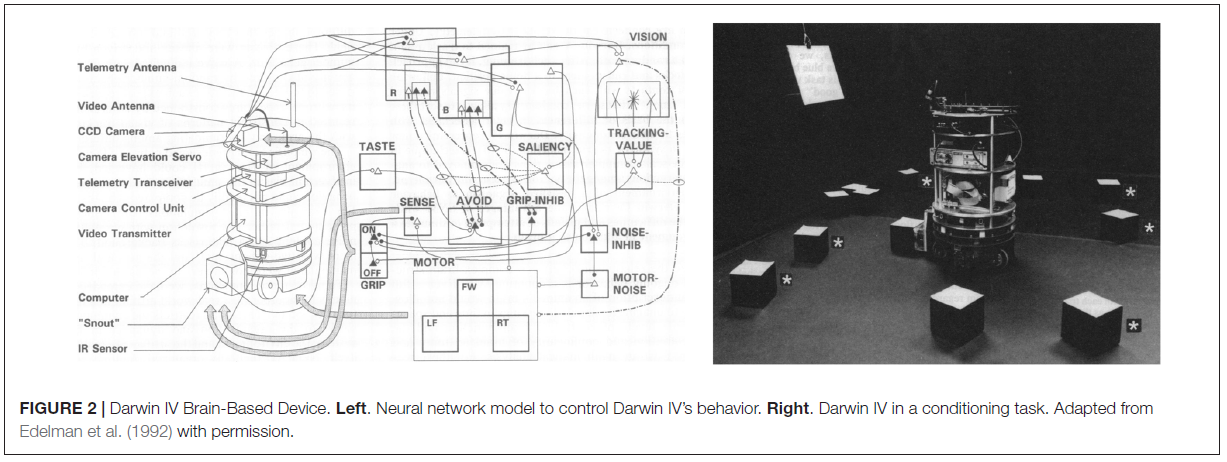
我对神经科学研究所的访问几乎好得令人难以置信。我接受了Edelman创建的研究所的整体使命,并且喜欢与Sporns和他的同事讨论研究。La Jolla很漂亮,尤其是对于12月份从美国东海岸来访的人来说。但是,帮助达成交易的一件事是会见了他们的工程师Jim Snook。Jim是一位自学成才的工程师,他既有创意又有才华。我不能说像这样的人对于运行神经机器人实验室来说是多么宝贵。我知道如果我加入他们的团队,我就可以专注于科学,因为我知道有人可以让机器保持运行(见图3)。多年来,我非常幸运能与一些非常有才华的工程师一起工作,包括Jim Snook、Donald Hutson、Doug Moore、Brian Cox和Liam Bucci。这很好,因为多年来我毁坏了很多机器!
不用说,我抓住了这个机会,搬到了圣地亚哥,开始了我在基于大脑的设备、认知机器人和神经机器人领域的职业生涯。
1 有关这些乌龟行动的真正令人愉快的视频,请参见:https://www.youtube.com/watch?v=lLULRlmXkKo
2 ‘‘Fast, Cheap & Out of Control”,Errol Morris的一部电影,由Sony Pictures Classics于1997年发行。
3 因为基于大脑的设备具有自适应性和随机性,所以我们不允许将它们称为机器人,因为机器人具有更固定的行为。 至少当时的想法是这样。 它有时会引起混乱甚至嘲笑。
EARLY YEARS
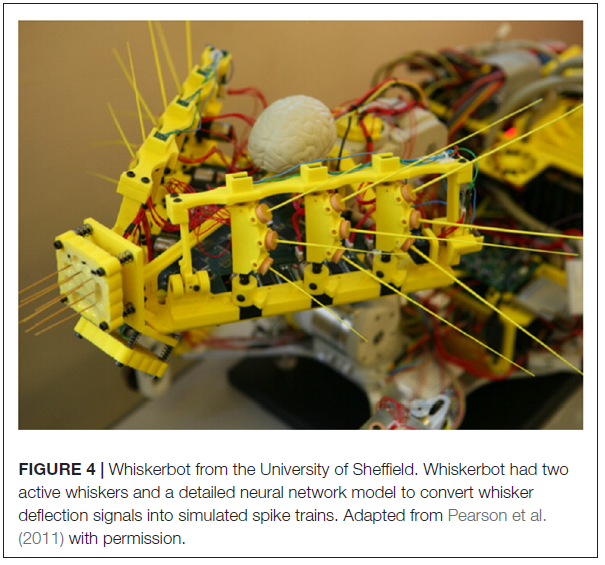
我在这个研究领域的出场是2000年的自适应行为模拟(SAB)会议。我们报道了Darwin VII,我们的基于大脑的设备能够进行感知分类(Krichmar et al., 2000)。此时,只有少数志同道合的研究小组在研究如何将具身计算神经科学模型用作理解大脑和行为的工具。例如,谢菲尔德大学的Tony Prescott和他的团队正在开发基于基底神经节的机器人动作选择模型(Girard et al., 2003; Prescott et al., 2006)。该小组还在研究啮齿动物的胡须,并开发了一种带有仿生胡须的机器人感觉运动电路(Pearson et al., 2011)。图4显示了他们在2005年左右完成的Whiskerbot。
与神经机器人相关的还有Dario Floreano的进化机器人小组和Rolf Pfeifer的形态计算小组的工作。
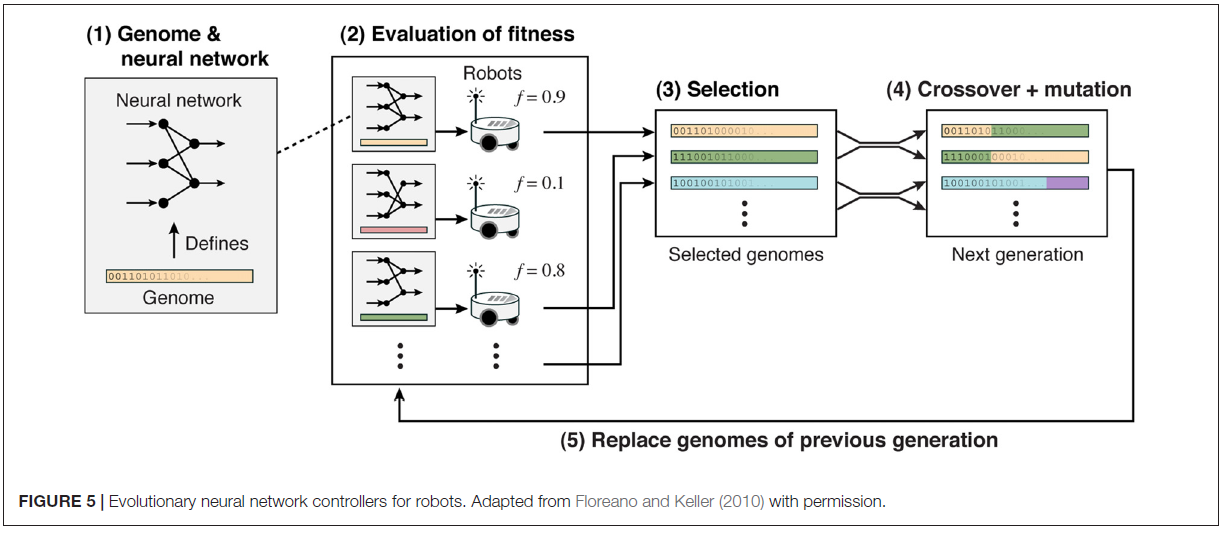
Nolfi和Floreano (2000)建立了进化机器人领域。他们使用进化算法来进化神经网络,这些神经网络支持从导航迷宫到开发捕食者-猎物策略的一系列行为(Floreano and Keller, 2010)。图5显示了策略:(1) 基因组定义了神经网络控制器,它具有接收来自传感器的输入的输入神经元和控制执行器的输出神经元。这些基因组可以直接定义权重或间接定义可塑性和拓扑规则。(2) 适应度基于机器人在任务中的表现。(3) 选择了最好的神经网络控制器,以及 (4) 进行变异和/或交叉。(5) 从这个选择中,产生了一个新的神经网络控制器群体。
Pfeifer和Bongard (2006)认为"身体塑造了我们的思维方式"。他们提出生物有机体进行形态计算,即某些过程由身体执行,否则由大脑执行。通过巧妙地使用身体计划和材料,他们展示了机器人的形态如何能够以最少的神经控制导致智能行为。例如,他们的四足小狗有一个小型神经网络来控制步态,但步态的主要控制来自其臀部和膝盖的弹性以及脚上的摩擦量(Hoffmann et al., 2012)。我记得参观过Pfeifer在苏黎世的AI实验室并与他的学生交谈。通常,他们最重要的设计考虑是选择合适的材料。在小狗的情况下,他们选择了一种用于覆盖滑雪板的材料,该材料具有恰到好处的摩擦力。由于形态与环境的动态相互作用,而不是复杂的控制策略,弹性腿和粘性脚的结合使小狗能够在各种地形上适应其步态。小狗的动作远比其他有腿机器人此时的动作要自然得多。
尽管在该领域取得了这些进步,但Darwin系列的自动机是一个异常值。然而,应该提到的是,其他团队也有类似的目标来生产受大脑启发的机器人并开发支持这项工作的架构。例如,计算体现神经科学方法(Caligiore et al., 2010),其目的是开发系统级模型,以应对越来越多的实验,同时避免构建仅考虑特定单项实验。另一种相关的方法是认知发展机器人(Asada et al., 2009),这是一种在发展上构建认知功能的综合方法。在这些方法中,如果我忽略了其他相关方法,请原谅我,模拟受到我们关于认知科学、神经科学和心理学的知识的限制,并且实验是在位于现实世界中的物理体现系统上进行的。
我们自己的小组通过证明Darwin VII能够通过视觉和听觉刺激进行一阶和二阶条件反射来跟进SAB感知分类工作(Krichmar and Edelman, 2002)。控制其行为的神经网络大约有20000个神经元和近500000个突触连接,所有这些都必须实时更新以跟上主动视觉和传感器的速度。当我此时就Darwin VII和其他基于大脑的设备进行演讲时,问题会出现,为什么我们需要这么多神经元,总是如此。这种行为可以通过更小的神经网络来实现。例如,Floreano和Keller (2010)在进化机器人方面的工作表明,小型神经网络足以支持有趣的行为。此外,被动步行者的动力学表明,可以在很少或没有控制的情况下观察到复杂的行为,例如双足运动(Collins et al., 2005)。
尽管神经网络的大小通常取决于问题域,但在使用具身模型研究大脑时,构建和分析大规模神经网络有实际和理论上的原因。实际原因是,如果您想保留神经解剖学通路,例如在神经机器人视觉实验中,您将需要许多神经元。例如,我们的视觉皮层模型使我们能够测试特征绑定和不变对象识别理论,需要在每个相机像素(或感受野)的每个特征(颜色对立和方向选择性)上都有一个神经元。这导致了一个大规模的神经网络来编码环境特征(Seth et al., 2004b)。将其与我们用胡须编码触觉特征的神经网络模型进行比较(Seth et al., 2004a)。该模型需要一个数量级较小的神经网络来编码环境特征。
理论上的原因是,如果你想使用神经机器人来研究大脑,你需要同时考虑神经动力学和功能神经解剖学。 当我在神经科学研究所时,Edelman有时会问我们小组"如果我拿枪指着你的头问你大脑最重要的特征是什么,你的答案是什么?" Eugene Izhikevich,我当时的合作者和同事,回答了神经元(Izhikevich, 2004)。我的答案总是解剖学。大脑可以在广泛的神经动力学范围内运作。但是,如果一个关键的大脑区域例如因中风而受损,它会使一个人进入植物人状态。对于神经建模,保留解剖投影会导致大规模异构架构。拥有大量具有生物物理特性的神经元会导致有趣的神经动力学,正如我们在海马体和周围区域的大型模型中所观察到的那样(Krichmar et al., 2005a; Fleischer et al., 2007)。在这个模型中,内嗅皮层和海马亚区之间复杂的相互作用导致机器人学习的不同点依赖不同的功能通路。神经元动力学和解剖学通路对于真实的大脑反应都是必要的。尽管这种保真度会导致高度复杂的网络,但它确实允许人们测试大脑理论并做出更好的预测。
有趣的是,网络规模的问题不再出现。随着能够以非常低的功率支持大脑级神经网络的神经形态硬件的出现(Indiveri et al., 2011; Merolla et al., 2014),以及具有许多隐藏层的深度神经网络的复兴(LeCun et al., 2015),大规模神经网络现在很流行。事实证明,许多层形式的大小对于解决更具挑战性的问题是必要的。在大脑中,处理现实世界的挑战需要许多解剖区域、不同的拓扑结构和神经元类型。
START OF A COMMUNITY
在接下来的几年里,神经机器人学社区出现了部分原因是关于该主题的研讨会和特殊期刊问题。我有幸参加了其中的几个活动。2004年,Anil Seth、Olaf Sporns和我在SAB国际会议上组织了一场关于"神经科学和神经信息学中的神经机器人模型"的特别会议(Seth et al., 2005)。为了介绍会议,我们指出神经机器人设备具有以下特性:(1) 它从事行为任务。(2) 它位于结构化的环境中。(3) 它的行为由模拟神经系统控制,其设计在某种程度上反映了大脑的结构和动态。会议包括Auke Ijspeert对机器蝾螈进化神经网络的研究(Ijspeert et al., 2005, 2007)。在这项研究中,由于大脑和身体与特定环境(即水或陆地)之间的相互作用,出现了不同的运动模式(即游泳或步行)。Olaf Sporns和Max Lungarella展示了具体化如何改变和改进神经系统的信息处理(Lungarella et al., 2005)。脑启发导航对这种神经机器人学做出了许多贡献,不仅表明头部方向细胞、位置细胞和网格细胞如何促进啮齿动物导航,而且还展示了这些系统如何导致机器人导航。在这方面,有几篇关于该主题的文章(Arleo et al., 2004; Banquet et al., 2005; Chavarriaga et al., 2005)。
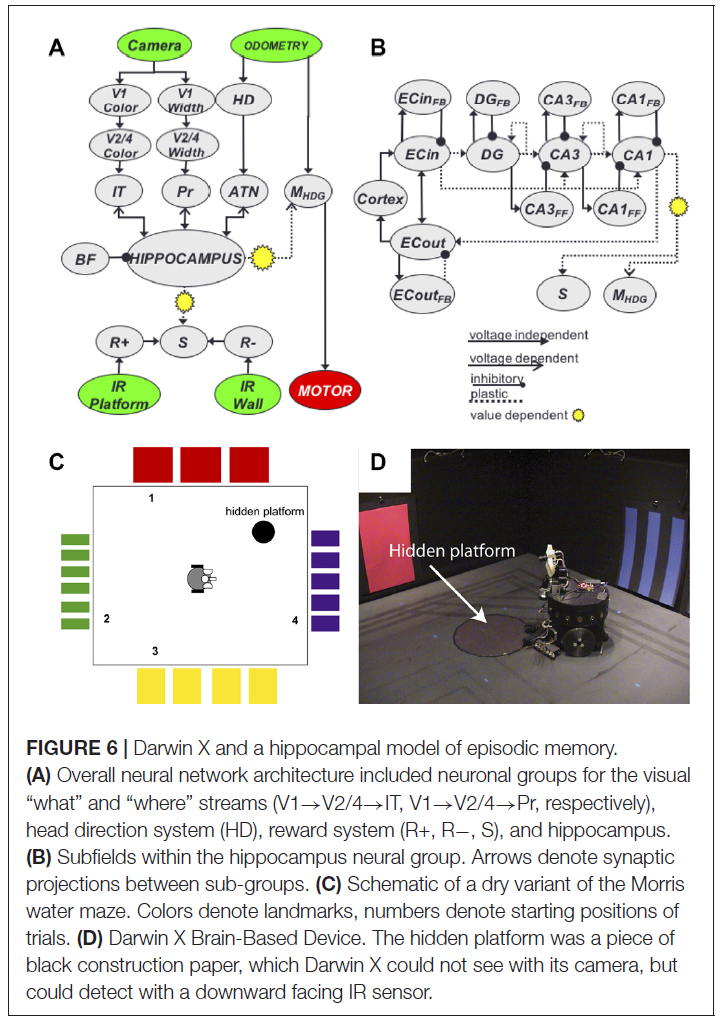
此时,我们介绍了Darwin X,这是一个非常详细的海马体和周围区域模型,支持基于大脑的设备中的空间和回合式记忆4(Krichmar et al., 2005a, b)。像许多这些具身导航模型一样,我们使用机器人来检查神经活动如何引起目标导向的行为5。机器人的任务是在莫里斯水迷宫的干燥变体中导航(图6)。 与老鼠类似,机器人能够创建通往隐藏平台的路线。在它的体验过程中,位置细胞出现在模拟的海马体中。这项工作的特别之处在于网络的庞大规模(100000个神经元和150万个突触),它必须实时运行。由于这种规模和复杂性,我们必须开发用于分析大规模网络的新方法。在我们的例子中,我们想知道是什么神经活动导致了位置细胞的发放。在一篇文章中,我们开发了一种称为回溯的方法,从海马位置反应的开始到导致该反应的感官数据递归追溯(Krichmar et al., 2005a)。另一篇文章是最早将Granger Causality应用于神经网络的研究之一,我们分析了模拟内嗅皮层、齿状回和CA3活动导致CA1位置细胞反应的原因(Krichmar et al., 2005b)。这项工作的一个关键发现是,三突触通路(EC→DG→CA3→CA1)更依赖于学习新的地点和路线,而穿孔通路(EC→CA1)更依赖于回忆熟悉的地方和路线。另一个关键发现是,该实验在多个层面证明了简并性。简并性是结构不同的元素执行相同功能或产生相同输出的能力,并已在整个生物系统中得到证明(Edelman and Gally, 2001)。Darwin X在以下方面表现出退化:(1) 行为层面。没有两个Darwin X以相同的方式解决迷宫,但他们都解决了迷宫。我们通过迷宫协议运行了Darwin X九次,其神经网络的连接性仅略有不同。一些Darwin X直接去平台,一些反弹墙壁到达平台。有些坚持不懈,有些则是探索性的。(2) 神经层面。我们在不同的试验中检查了地方细胞的活动,其中Darwin X在同一朝向上经过同一个地方。即使在这些相似的条件下,一组不同的神经元也会导致这个位置细胞的发放。这只能在我们可以访问完整人工大脑的计算模型和机器人系统中显示,其中不可靠的传感和环境噪声会改变上下文。(3) 系统层面。Darwin XI在十字迷宫中导航(Fleischer and Krichmar, 2007; Fleischer et al., 2007),从其相机(视觉)、胡须(体感)、罗盘(头部方向)和激光测距仪(深度/距离)。Darwin XI的空间记忆是多模态和退化的。即使它的一种或多种感觉方式受损,Darwin XI的行为和位置细胞活动仍保持稳定。此外,诸如Granger Causality和Dynamic Causal Modeling之类的系统级工具可以揭示复杂模型中的功能通路(Friston, 2009)。在Darwin X和IX的案例中,Granger Causality表明了三突触通路在学习新环境时的重要性,以及在环境熟悉时对穿孔通路的依赖。
对我来说另一个具有里程碑意义的事件是与Hiroaki Wagatsuma的会面。这导致组织了一系列研讨会、文章和讨论。Hiro强迫我共同编辑一本关于这个主题的书,这是一次艰苦但有益的经历,最终导致了一本名为"神经形态和大脑机器人学"的书(Krichmar and Wagatsuma, 2011)。这本书涵盖了广泛的主题,从神经形态设计到机器人的大脑结构,再到哲学思考。有关于使用这些机器人的伦理学的文章,以及随着这些机器人变得更加复杂而将这些机器人视为有知觉的实体,以及关于使用神经机器人研究意识的一章。
到目前为止,神经机器人技术正变得越来越主流。IEEE机器人与自动化杂志专门针对该主题发表了一期(Browne et al., 2009)。在主要的IEEE机器人会议上,偶尔会有关于这个主题的特别会议。有政府支持的财团致力于研究和开发认知机器人,例如欧盟的iCub项目(Metta et al., 2010)、日本的认知发展机器人计划(Asada et al., 2009)和计算体现神经科学方法(Caligiore et al., 2010)。欧盟的人脑项目是一个了解神经系统的大型研究项目,其中包括一个由Alois Knoll和Florian Rohrbein领导的神经机器人部门(Falotico et al., 2017)。澳大利亚RatSLAM团队报告了神经启发算法的结果,这些算法与传统机器人的最先进定位和映射一样好或更好(Milford et al., 2016)。
此外,此时重要的是神经形态工程的重新出现(Krichmar et al., 2015)。与神经机器人学的目标类似,神经形态工程利用大脑的灵感来构建设备,在这种情况下是计算机架构和传感器。由于这些计算机是专门为脉冲神经网络设计的,因此控制神经机器人的算法非常适合这些平台。我们的小组证明,背侧视觉流的大规模脉冲神经网络模型可以导致机器人有效避障和跟踪(Beyeler et al., 2015)。使用IBM的低功耗TrueNorth (TN)神经形态芯片(Esser et al., 2016),我们证明了可以训练卷积神经网络在山路上自动驾驶机器人(Hwu et al., 2017)。机器人和TN芯片均由单个业余爱好级别的镍金属氢化物电池供电(图 7)6。图7中显示的电路图和流水线可以推广到其他硬件和神经机器人应用。
由于它们的低功耗、事件驱动架构,神经形态学的最新发展为神经机器人应用带来了巨大的希望。除了我们在IBM芯片上的工作外,SpiNNaker还用于机器人避障和随机探索任务(Stewart et al., 2016)。正在开发新芯片,例如英特尔的Loihi,它将支持嵌入式神经形态应用(Davies et al., 2018)。除了在专用硬件上运行神经网络之外,还正在开发极低功耗的神经形态视觉和听觉传感器(Liu and Delbruck, 2010; Stewart et al., 2016)。与生物学类似,这些传感器只对变化或显著事件做出反应,当它们做出反应时,会产生一系列脉冲信号。这允许将这些传感器与脉冲神经网络无缝集成,并且它们的事件驱动性质导致电源效率非常适合嵌入式系统(即机器人!)。
4好的。这是一个机器人。旧习难改。
5尽管我认为海马体和空间导航很有趣,但我确实认为它被过度研究了,并且有许多有趣的、未开发的大脑区域和行为需要研究。然而,就像教父III中的那句话,“就在我以为我出去的时候,他们(我的学生、博士后和合作者)把我拉回来了。”
6所以,它违反了我关于神经解剖学重要性的规则。叫我伪君子。尽管如此,它还是TrueNorth的第一次,也是为数不多的嵌入闭环系统的神经形态芯片演示之一。此外,看到IBM价值数百万美元的硬件沿着山路蜿蜒而下,用Velcro连接到我们机器人的背面,并通过跨接电缆连接到机器人的电源,真是太酷了。

FRONTIERS IN NEUROROBOTICS
社区的一个里程碑事件是2007年神经机器人学前沿的创刊号,由Alois Knoll和Florian Rohrbein创立。最后,该领域有一个专门的交流思想的平台和一个正式名称。最初的一年不仅有许多该领域先驱的文章,而且还展示了该领域的广度。Tani (2007)在仿人机器人中使用循环神经网络探索了自上而下和自下而上对感觉运动耦合的影响。Angelo Cangelosi和Stefano Nolfi是进化算法方面的专家,他们开发了一种用于达到和抓取的神经控制器(Massera et al., 2007)。Goodman et al. (2007)介绍了他们的虚拟神经机器人环境,它可以支持非常大规模的神经生物学启发网络。Philippe Gaussier的小组描述了他们关于海马启发式机器人导航的最新结果(Cuperlier et al., 2007)。最后,Steve Potter在多电极阵列中使用真实的神经元来控制绘制艺术品的机械臂(Bakkum et al., 2007)。
FUTURE OUTLOOK
神经机器人学和认知机器人学现在是一个充满活力、活跃的领域。看看神经机器人前沿中的一些最新文章,许多相同的问题仍然存在,例如运动控制、导航、映射和开发神经网络。我个人希望我们作为一个社区关注更普遍的认知。很多时候,包括现在的公司,我们专注于特定的大脑区域或行为。然而,生物有机体是终极的多任务者,可以很容易地适应新的情况。我们中的许多人,包括现在的公司,都宣扬将大脑、身体和环境结合起来,但过多地关注大脑。神经科学也是如此,目前的重点是对大脑成分和神经技术的详细研究,以收集更多数据。相比之下,Krakauer et al. (2017)指出神经科学的目标是理解行为,因此我们应该在自然主义行为的背景下研究大脑。许多机器人专家过分关注身体并简化机器人的行为。总体而言,该领域需要采取更全面的方法。大脑和身体共同进化,以在充满活力、充满挑战的世界中发展出更成功的行为。然而,身体通常领先于大脑,其形态对我们所谓的智力至关重要(Pfeifer and Bongard, 2006; Krichmar, 2012)。"形态计算"的概念,其中过程由身体及其对环境的利用而不是由中央控制系统执行(Pfeifer and Bongard, 2006),可能会极大地影响我们如何理解大脑、身体和环境(Clark, 1996),以及我们如何设计未来的神经机器人。正如所讨论的,被动步行者的形态减轻了复杂控制策略的必要性(Collins et al., 2005),并且Whiskerbot中使用的材料在主动搅拌期间具有适当的动态识别对象(Prescott et al., 2006)。虽然我已经展示了许多关于具体神经模型如何在现实世界中产生有趣行为的例子,但未来我们需要开发更现实的场景来测试我们的模型,并考虑身体计划如何减轻大脑处理的负担。
对该领域未来持乐观态度的另一个原因是,现在任何人都可以成为神经机器人学家。虽然我们偶尔需要为特定任务制造定制机器人,但今天的大多数机器人都可以用套件、现成零件和3D打印来构建,成本只是我刚进入这个领域时的一小部分。例如,我们实验室的博士后学者Nicolas Oros构建了一个低成本但功能强大的机器人,具有业余级平台和Android智能手机作为计算和传感引擎(Oros and Krichmar, 2013)。我们已将这种基于Android的机器人理念用于广泛的研究和学生项目。与Radio Shack时代类似,现在有一个在线爱好者社区,可以轻松获取构建复杂机器人所需的所有组件。此外,开源软件使编程神经网络、控制物理机器人(例如,机器人操作系统7)以及为虚拟机器人创建环境变得容易8。这些进步使任何研究人员、学生或爱好者都可以在一个神经机器人项目上轻松上手。
总的来说,这是人工智能和人工神经网络的一个激动人心的时刻。我们看到人工系统在某些任务中表现出优于人类的表现(Mnih et al., 2015; Silver et al., 2016)。此外,深度神经网络已被用于机器人应用,并取得了可喜的成果。例如,开发了一个扩展受限玻尔兹曼机的增量深度模型来识别场景的上下文(例如,通常在办公室、厨房、洗手间中发现的物体),以便机器人能够做出适当的响应(Dogan et al., 2017)。在另一个例子中,深度信念神经网络被训练用于物体识别和机器人抓取(Hossain and Capi, 2016)。DBNN能够通过提取物体特征来识别不同位置和方向的物体,然后利用这些信息实时抓取物体。
但是,我认为这种当前流行的方法存在局限性。它适用于有限的领域,通常需要冗长的特定训练,并且可能无法解决我们认为理所当然但归因于智能的许多行为(Larson, 2017)。为了解决这些限制,Jeff Hawkins最近在IEEE Spectrum中提出,智能系统必须包含大脑的三个关键特征(Hawkins, 2017):(1) 重新布线学习:我们在一生中快速、渐进地学习。(2) 稀疏表示;生物系统受到极端代谢限制,需要有效地表示信息。(3) 包含性:在整个智能系统中都可以观察到感觉运动的整合。我要补充 (4) 价值体系:从环境中提取显著性并做出适当的响应(Friston et al., 1994; Krichmar, 2008),以及 (5) 预测:利用过去的经验在未来取得更大的成功(Clark, 2013)。在价值系统领域,神经调节模型已被用于模拟价值预测和驱动动作选择(Sporns and Alexander, 2002; Cox and Krichmar, 2009; Vargas et al., 2009; Krichmar, 2013; Navarro-Guerrero et al., 2017)。使用分层贝叶斯系统和循环神经网络的预测编码策略已被用于机器人开发内部模型,以预测物体和其他机器人的运动(Park et al., 2012; Murata et al., 2017)。然而,未来的神经机器人应用需要以整体方式解决上述所有五个特征,并证明机器人的行为可以在多个任务域和更长的时间范围内泛化。我坚信神经机器人是解决这些问题和局限性的理想方法。
我认为,为了获得一个真正的认知系统,必须研究自然系统的大脑和身体,并从中得到启发。有时这些讨论会变得激烈。有些人认为这不是必要的要求。然而,生物智能是一种存在证明,也是目前我们唯一的工作模型。通过使用Neurorobots遵循它的道路,最终将导致智能认知机器人和助手。


 浙公网安备 33010602011771号
浙公网安备 33010602011771号