多项式曲线拟合
多项式曲线拟合
本文参照PRML第一章与第三章,实作验证了多项式曲线拟合的例子
线性基函数模型
现在假设一个训练集,这个训练集由\(\mathbf x\)的\(N\)的观测组成,写作\(\mathbf x = (x_1, \ldots, x_N)^\top\),与之对应的\(\mathbf t\)的观测值记作\(\mathbf t = (t_1, \ldots, t_N)^\top\)。现在,从\([0,1]\)之间均匀选取\(N\)个\(x_n\),目标数据\(\mathbf t\)的获取方式是:首先计算函数\(\sin(2\pi x)\)的对应值,然后给得到的每个数据点增加一个小的满足高斯分布的随机噪声,从而得到对应的\(t_n\)值,即
其中\(\varepsilon\)采样自\(\mathcal N(\varepsilon\ |\ 0, \sigma^2)\)。
我们的目标是利用这个训练集预测对于新的输入变量\(x\)的目标变量值\(t\)。这本质上是一个困难的问题,因为我们不得不从有限的数据生成对应的模型。而且,观测到的数据被噪声干扰,因此对于一个给定的\(x\),合适的\(t\)值具有不确定性。但是现在,我们可以使用一种不太正式的,相当简单的方式来进行曲线的拟合。我们考虑如下的线性模型
其中\(\phi_j(\mathbf x)\)被称为基函数,且这个模型中的参数总数为\(M\)。
在本例中,基函数\(\phi_j(\mathbf x)\)设为
如果我们设定\(\phi_0(\mathbf x)=1\),则可将上式模型写作
其中\(\mathbf \omega=(\omega_0, \ldots, \omega_{M-1})^\top\)且\(\mathbf\phi=(\phi_0, \ldots, \phi_{M-1})^\top\)
我们可以使用非线性的基函数,使得\(y(\mathbf x, \mathbf\omega)\)为输入向量\(\mathbf x\)的一个非线性函数,但是这样的情况依然被称作是线性函数,因为这个函数是\(\mathbf \omega\)的线性函数。
模型的参数估计
最小平方误差估计
系数\(\mathbf \omega\)的估计可以通过最小化误差函数来获得。一个简单的广泛应用的误差函数是每个数据点\(x_n\)的预测值\(y(x_n, \mathbf\omega)\)与目标值\(t_n\)相差的平方和
其中,\(\frac{1}{2}\)是为了计算方便。现在我们要选取使得\(\mathbf E(\mathbf\omega)\) 最小的 \(\mathbf\omega\)值,因为,若所有数据均预测正确,那么误差值就为零。即
由于误差函数是\(\mathbf\omega\)的二次函数,所以关于\(\mathbf\omega\)的导数是线性函数,令其等于零,只有一解,也即误差函数的最小值有一个唯一解。
现在将上一节所述模型代入误差函数求解,即
对其关于\(\mathbf\omega\)求导, 得
令其等于零,可得
求解\(\mathbf\omega\),有
这里\(\mathbf\Phi\)是一个\(N\times M\)的矩阵,其元素\(\Phi_{nj} = \phi_j(x_n)\),即
式中
被定义为\(\mathbf\Phi\)的MP伪逆。
之后预测模型可以写作
最大似然估计
最小平方误差的解可以看成高斯噪声模型假设下的最大似然解。
与一开始一样,假设目标变量\(t\)由确定的函数\(y(\mathbf x, \mathbf\omega)\)给出,这个函数被附加了一个高斯噪声,即
其中\(\varepsilon\)是一个零均值,精度(方差的倒数)为\(\beta=\frac{1}{\sigma^2}\)的高斯随机变量。因此,有
考虑现在有给定的输入数据集\(\mathbf X = \{x_1, \ldots, x_N\}\),对应的目标值为\(\mathbf t = \{t_1, \ldots, t_N\}\)。那么观测数据的似然函数为
取对数,并且使用一元高斯分布的标准形式,有
其中平方和误差函数被定义为
写出了似然函数,我们可以使用最大似然函数的方法确定\(\mathbf \omega\)。
在这里,关于\(\mathbf\omega\)求最大值,与之前求最小平方误差等价。求解\(\mathbf\omega\)有
正则化
可以通过给误差函数添加正则化项来控制过拟合,因此需要最小化的误差函数为
其中\(\lambda\)是正则化系数。正则化项一个简单的形式是\(\ell_2\)正则
考虑\(\ell_2\)正则化,那么整个误差函数就变为
令其关于\(\mathbf\omega\)的导数等于零,可得
实验
使用 Python 模拟实验。
导入必要的数据包
import matplotlib.pyplot as plt
import numpy as np
from numpy.linalg import inv
from functools import partial
生成具有高斯噪声的目标数据值\(t_n\)
RANGE = [0, 1]
X = np.linspace(*RANGE, 10)
target = np.sin(2*np.pi*X) + np.random.normal(0, 0.2, len(X))
定义\(\phi(x_n)\)与\(\mathbf\Phi\)
def phi(x, m):
_phi = [ 1 ]
for i in range(m):
_phi.append(x**(i+1))
return _phi
def Phi(X, m):
_Phi = [ ]
for x in X:
_Phi.append(phi(x, m))
return np.array(_Phi)
定义预测函数,以及预测模型的绘制函数
def predict(x, omega):
return omega.dot(phi(x, len(omega)-1))
def plot_predict(func, range, label='', resolution=0.02, color='red'):
_x = np.arange(range[0], range[1], resolution)
_y = [ func(x) for x in _x ]
plt.plot(_x, _y, color=color, label=label)
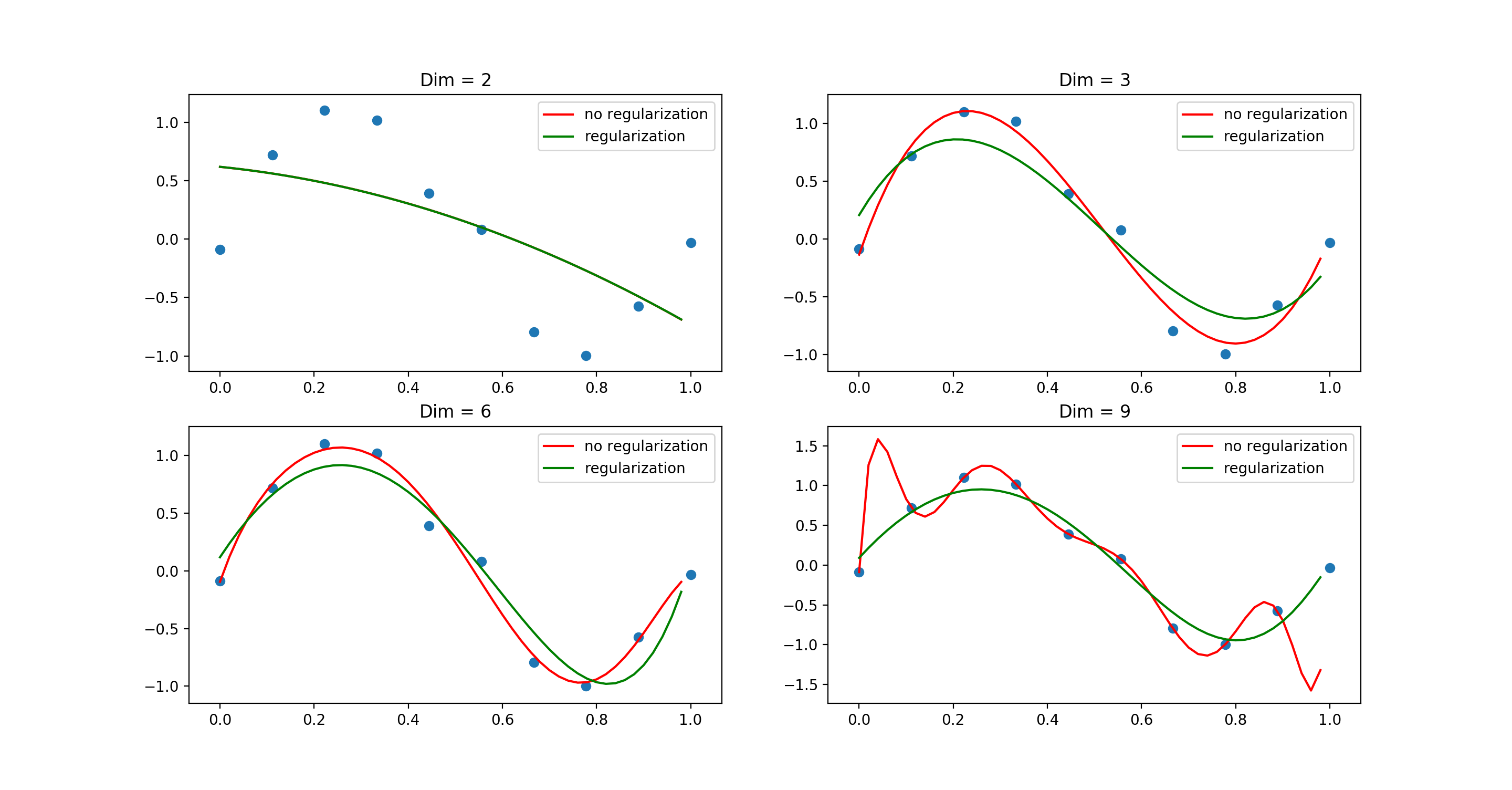
对比各种参数个数的模型,以及正则化模型之间的对比
for idx, dim in enumerate([2, 3, 6, 9]):
# 计算模型参数
_Phi = Phi(X, dim)
omega = inv(_Phi.T.dot(_Phi)).dot(_Phi.T).dot(target)
## 正则化
lambda_ = 1e-3
omega_r = inv(lambda_*np.eye(dim+1) + _Phi.T.dot(_Phi)).dot(_Phi.T).dot(target)
# 预测函数
predict = partial(predict, omega=omega)
predict_r = partial(predict, omega=omega_r)
# 绘制图像
ax = plt.subplot(2, 2, idx+1)
plot_predict(predict, RANGE, label='no regularization', color='red')
plot_predict(predict_r, RANGE, label='regularization', color='green')
plt.scatter(X, target)
plt.title('Dim = $%d$' % dim)
plt.legend()
plt.show()
实验结果


 浙公网安备 33010602011771号
浙公网安备 33010602011771号