Python-22-并发编程
一、进程
1. 什么是进程
狭义定义:进程是正在运行的程序的实例(an instance of a computer program that is being executed)。
广义定义:进程是一个具有一定独立功能的程序关于某个数据集合的一次运行活动。它是操作系统动态执行的基本单元,在传统的操作系统中,进程既是基本的分配单元,也是基本的执行单元。
2. 并发与并行
无论是并行还是并发,在用户看来都是'同时'运行的,不管是进程还是线程,都只是一个任务而已,真是干活的是cpu,cpu来做这些任务,而一个cpu同一时刻只能执行一个任务
- 并发:是伪并行,即看起来是同时运行。单个cpu+多道技术就可以实现并发,(并行也属于并发)
- 并行:同时运行,只有具备多个cpu才能实现并行

3. 同步与异步
同步就是当一个进程发起一个函数(任务)调用的时候,一直等到函数(任务)完成,而进程继续处于激活状态。
简单来说,同步就是必须一件一件事做,等前一件做完了才能做下一件事。
例如:B/S模式中的表单提交,具体过程是:客户端提交请求->等待服务器处理->处理完毕返回,在这个过程中客户端(浏览器)不能做其他事。
异步则是当一个进程发起一个函数(任务)调用的时候,不会等函数返回,而是继续往下执行当,函数返回的时候通过状态、通知、事件等方式通知进程任务完成。
同步和异步的区别:请求发出后,是否需要等待结果,才能继续执行其他操作。
4. 阻塞与非阻塞
阻塞和非阻塞这两个概念与程序(线程)等待消息通知(无所谓同步或者异步)时的状态有关。也就是说阻塞与非阻塞主要是程序(线程)等待消息通知时的状态角度来说的。
阻塞是当请求不能满足的时候就将进程挂起,而非阻塞则不会阻塞当前进程
5. multiprocessing模块
python中的多线程无法利用多核优势,如果想要充分地使用多核CPU的资源(os.cpu_count()查看),在python中大部分情况需要使用多进程。Python提供了multiprocessing。
multiprocessing模块用来开启子进程,并在子进程中执行我们定制的任务(比如函数),该模块与多线程模块threading的编程接口类似。
multiprocessing模块的功能众多:支持子进程、通信和共享数据、执行不同形式的同步,提供了Process、Queue、Pipe、Lock等组件。
需要强调的一点是:与线程不同,进程没有任何共享状态,进程修改的数据,改动仅限于该进程内。
Process([group [, target [, name [, args [, kwargs]]]]]),由该类实例化得到的对象,表示一个子进程中的任务(尚未启动)
group参数未使用,值始终为None
target表示调用对象,即子进程要执行的任务
args表示调用对象的位置参数元组,args=(1,2,'egon',)
kwargs表示调用对象的字典,kwargs={'name':'egon','age':18}
name为子进程的名称
p.daemon:默认值为False,如果设为True,代表p为后台运行的守护进程,当p的父进程终止时,p也随之终止,并且设定为True后,p不能创建自己的新进程,必须在p.start()之前设置 p.name:进程的名称 p.pid:进程的pid p.exitcode:进程在运行时为None、如果为–N,表示被信号N结束(了解即可) p.authkey:进程的身份验证键,默认是由os.urandom()随机生成的32字符的字符串。这个键的用途是为涉及网络连接的底层进程间通信提供安全性,这类连接只有在具有相同的身份验证键时才能成功(了解即可)
常用方法:
p.start():启动进程,并调用该子进程中的p.run() p.run():进程启动时运行的方法,正是它去调用target指定的函数,我们自定义类的类中一定要实现该方法 p.terminate():强制终止进程p,不会进行任何清理操作,如果p创建了子进程,该子进程就成了僵尸进程,使用该方法需要特别小心这种情况。如果p还保存了一个锁那么也将不会被释放,进而导致死锁 p.is_alive():如果p仍然运行,返回True p.join([timeout]):主线程等待p终止(强调:是主线程处于等的状态,而p是处于运行的状态)。timeout是可选的超时时间,需要强调的是,p.join只能join住start开启的进程,而不能join住run开启的进程
创建子进程的两种方式:
import multiprocessing
def foo(name):
print(name)
if __name__ == '__main__':
p1 = multiprocessing.Process(target=foo, args=('alex',))
p2 = multiprocessing.Process(target=foo, args=('Tom',))
p1.start()
p2.start()
import multiprocessing
class MyProcess(multiprocessing.Process):
def __init__(self, name):
super().__init__()
self.name = name
def run(self):
print(self.pid, self.name)
if __name__ == '__main__':
p1 = MyProcess('alex')
p2 = MyProcess('Tom')
p1.start()
p2.start()
join()
from multiprocessing import Process
import time
import random
class Piao(Process):
def __init__(self,name):
self.name=name
super().__init__()
def run(self):
print('%s is piaoing' %self.name)
time.sleep(random.randrange(1,3))
print('%s is piao end' %self.name)
p=Piao('egon')
p.start()
p.join(0.0001) #等待p停止,等0.0001秒就不再等了
print('开始')
join:主进程等,等待子进程结束吧
6. 守护进程
主进程创建守护进程
其一:守护进程会在主进程代码执行结束后就终止
其二:守护进程内无法再开启子进程,否则抛出异常:AssertionError: daemonic processes are not allowed to have children
注意:进程之间是互相独立的,主进程代码运行结束,守护进程随即终止
from multiprocessing import Process
import time
import random
class Foo(Process):
def __init__(self,name):
self.name=name
super().__init__()
def run(self):
print(self.name)
time.sleep(random.randrange(1,3))
print('%s ending' % self.name)
p=Foo('test')
p.daemon=True #一定要在p.start()前设置,设置p为守护进程,禁止p创建子进程,并且父进程代码执行结束,p即终止运行
p.start()
print('主')
7. 进程同步(锁)
进程之间数据不共享,但是共享同一套文件系统,所以访问同一个文件,或同一个打印终端,是没有问题的,
而共享带来的是竞争,竞争带来的结果就是错乱,如何控制,就是加锁处理
#文件db的内容为:{"count":1}
#注意一定要用双引号,不然json无法识别
from multiprocessing import Process,Lock
import time,json,random
def search():
dic=json.load(open('db.txt'))
print('\033[43m剩余票数%s\033[0m' %dic['count'])
def get():
dic=json.load(open('db.txt'))
time.sleep(0.1) #模拟读数据的网络延迟
if dic['count'] >0:
dic['count']-=1
time.sleep(0.2) #模拟写数据的网络延迟
json.dump(dic,open('db.txt','w'))
print('\033[43m购票成功\033[0m')
def task(lock):
search()
lock.acquire()
get()
lock.release()
if __name__ == '__main__':
lock=Lock()
for i in range(100): #模拟并发100个客户端抢票
p=Process(target=task,args=(lock,))
p.start()
加锁可以保证多个进程修改同一块数据时,同一时间只能有一个任务可以进行修改,即串行的修改,没错,速度是慢了,但牺牲了速度却保证了数据安全。 虽然可以用文件共享数据实现进程间通信,但问题是:
1.效率低(共享数据基于文件,而文件是硬盘上的数据)
2.需要自己加锁处理
因此我们最好找寻一种解决方案能够兼顾:1、效率高(多个进程共享一块内存的数据)2、帮我们处理好锁问题。这就是mutiprocessing模块为我们提供的基于消息的IPC通信机制:队列和管道。
8. 队列
q.put方法用以插入数据到队列中,put方法还有两个可选参数:blocked和timeout。如果blocked为True(默认值),并且timeout为正值,该方法会阻塞timeout指定的时间,直到该队列有剩余的空间。
如果超时,会抛出Queue.Full异常。如果blocked为False,但该Queue已满,会立即抛出Queue.Full异常。 q.get方法可以从队列读取并且删除一个元素。同样,get方法有两个可选参数:blocked和timeout。如果blocked为True(默认值),并且timeout为正值,那么在等待时间内没有取到任何元素,会抛出Queue.Empty异常。
如果blocked为False,有两种情况存在,如果Queue有一个值可用,则立即返回该值,否则,如果队列为空,则立即抛出Queue.Empty异常. q.get_nowait():同q.get(False) q.put_nowait():同q.put(False) q.empty():调用此方法时q为空则返回True,该结果不可靠,比如在返回True的过程中,如果队列中又加入了项目。 q.full():调用此方法时q已满则返回True,该结果不可靠,比如在返回True的过程中,如果队列中的项目被取走。 q.qsize():返回队列中目前项目的正确数量,结果也不可靠,理由同q.empty()和q.full()一样
''' multiprocessing模块支持进程间通信的两种主要形式:管道和队列 都是基于消息传递实现的,但是队列接口 ''' from multiprocessing import Process,Queue import time q=Queue(3)
#put ,get ,put_nowait,get_nowait,full,empty q.put(3) q.put(3) q.put(3) print(q.full()) #满了 print(q.get()) print(q.get()) print(q.get()) print(q.empty())
9. 管道
创建管道:
Pipe([duplex]):在进程之间创建一条管道,并返回元组(conn1,conn2),其中conn1,conn2表示管道两端的连接对象,强调一点:必须在产生Process对象之前产生管道
dumplex:默认管道是全双工的,如果将duplex设成False,conn1只能用于接收,conn2只能用于发送。
主要方法:
conn1.recv():接收conn2.send(obj)发送的对象。如果没有消息可接收,recv方法会一直阻塞。如果连接的另外一端已经关闭,那么recv方法会抛出EOFError。 conn1.send(obj):通过连接发送对象。obj是与序列化兼容的任意对象
其他方法:
conn1.close():关闭连接。如果conn1被垃圾回收,将自动调用此方法 conn1.fileno():返回连接使用的整数文件描述符 conn1.poll([timeout]):如果连接上的数据可用,返回True。timeout指定等待的最长时限。如果省略此参数,方法将立即返回结果。如果将timeout射成None,操作将无限期地等待数据到达。 conn1.recv_bytes([maxlength]):接收c.send_bytes()方法发送的一条完整的字节消息。maxlength指定要接收的最大字节数。如果进入的消息,超过了这个最大值,将引发IOError异常,并且在连接上无法进行进一步读取。
如果连接的另外一端已经关闭,再也不存在任何数据,将引发EOFError异常。 conn.send_bytes(buffer [, offset [, size]]):通过连接发送字节数据缓冲区,buffer是支持缓冲区接口的任意对象,offset是缓冲区中的字节偏移量,而size是要发送字节数。
结果数据以单条消息的形式发出,然后调用c.recv_bytes()函数进行接收 conn1.recv_bytes_into(buffer [, offset]):接收一条完整的字节消息,并把它保存在buffer对象中,该对象支持可写入的缓冲区接口(即bytearray对象或类似的对象)。
offset指定缓冲区中放置消息处的字节位移。返回值是收到的字节数。如果消息长度大于可用的缓冲区空间,将引发BufferTooShort异常。
10. 进程池
创建进程池:
Pool([numprocess [,initializer [, initargs]]]) 创建进程池
参数:
numprocess:要创建的进程数,如果省略,将默认使用cpu_count()的值
initializer:是每个工作进程启动时要执行的可调用对象,默认为None
initargs:是要传给initializer的参数组
主要方法:
p.apply(func [, args [, kwargs]]):在一个池工作进程中执行func(*args,**kwargs),然后返回结果。需要强调的是:此操作并不会在所有池工作进程中并执行func函数。
如果要通过不同参数并发地执行func函数,必须从不同线程调用p.apply()函数或者使用p.apply_async() p.apply_async(func [, args [, kwargs]]):在一个池工作进程中执行func(*args,**kwargs),然后返回结果。此方法的结果是AsyncResult类的实例,callback是可调用对象,接收输入参数。
当func的结果变为可用时,将理解传递给callback。callback禁止执行任何阻塞操作,否则将接收其他异步操作中的结果。 p.close():关闭进程池,防止进一步操作。如果所有操作持续挂起,它们将在工作进程终止前完成 P.jion():等待所有工作进程退出。此方法只能在close()或teminate()之后调用
其他方法:
方法apply_async()和map_async()的返回值是AsyncResul的实例obj。实例具有以下方法 obj.get():返回结果,如果有必要则等待结果到达。timeout是可选的。如果在指定时间内还没有到达,将引发一场。如果远程操作中引发了异常,它将在调用此方法时再次被引发。 obj.ready():如果调用完成,返回True obj.successful():如果调用完成且没有引发异常,返回True,如果在结果就绪之前调用此方法,引发异常 obj.wait([timeout]):等待结果变为可用。 obj.terminate():立即终止所有工作进程,同时不执行任何清理或结束任何挂起工作。如果p被垃圾回收,将自动调用此函数


1 from multiprocessing import Pool 2 import os,time 3 def work(n): 4 print('%s run' %os.getpid()) 5 time.sleep(3) 6 return n**2 7 8 if __name__ == '__main__': 9 p=Pool(3) #进程池中从无到有创建三个进程,以后一直是这三个进程在执行任务 10 res_l=[] 11 for i in range(10): 12 res=p.apply(work,args=(i,)) #同步调用,直到本次任务执行完毕拿到res,等待任务work执行的过程中可能有阻塞也可能没有阻塞,但不管该任务是否存在阻塞,同步调用都会在原地等着,只是等的过程中若是任务发生了阻塞就会被夺走cpu的执行权限 13 res_l.append(res) 14 print(res_l)
1 from multiprocessing import Pool 2 import os,time 3 def work(n): 4 print('%s run' %os.getpid()) 5 time.sleep(3) 6 return n**2 7 8 if __name__ == '__main__': 9 p=Pool(3) #进程池中从无到有创建三个进程,以后一直是这三个进程在执行任务 10 res_l=[] 11 for i in range(10): 12 res=p.apply_async(work,args=(i,)) #同步运行,阻塞、直到本次任务执行完毕拿到res 13 res_l.append(res) 14 15 #异步apply_async用法:如果使用异步提交的任务,主进程需要使用jion,等待进程池内任务都处理完,然后可以用get收集结果,否则,主进程结束,进程池可能还没来得及执行,也就跟着一起结束了 16 p.close() 17 p.join() 18 for res in res_l: 19 print(res.get()) #使用get来获取apply_aync的结果,如果是apply,则没有get方法,因为apply是同步执行,立刻获取结果,也根本无需get
二、线程
1. 什么是线程
线程是操作系统能够进行运算调度的最小单位。它被包含在进程之中,是进程中的实际运作单位。一条线程指的是进程中一个单一顺序的控制流,一个进程中可以并发多个线程,每条线程并行执行不同的任务。一个线程是一个execution context(执行上下文),即一个cpu执行时所需要的一串指令。
2. 进程与线程的区别
- 同一个进程中的线程共享同一内存空间,但是进程之间是独立的。
- 同一个进程中的所有线程的数据是共享的(进程通讯),进程之间的数据是独立的。
- 对主线程的修改可能会影响其他线程的行为,但是父进程的修改(除了删除以外)不会影响其他子进程。
- 线程是一个上下文的执行指令,而进程则是与运算相关的一簇资源。
- 同一个进程的线程之间可以直接通信,但是进程之间的交流需要借助中间代理来实现。
- 创建新的线程很容易,但是创建新的进程需要对父进程做一次复制。
- 一个线程可以操作同一进程的其他线程,但是进程只能操作其子进程。
- 线程启动速度快,进程启动速度慢(但是两者运行速度没有可比性)。
3. threading模块
相关方法
| 方法 | 注释 |
|---|---|
| start() | 线程准备就绪,等待CPU调度 |
| setName() | 为线程设置名称 |
| getName() | 获取线程名称 |
| setDaemon(True) | 设置为守护线程 |
| join() | 逐个执行每个线程,执行完毕后继续往下执行 |
| run() | 线程被cpu调度后自动执行线程对象的run方法,如果想自定义线程类,直接重写run方法就行了 |
threading.currentThread(): 返回当前的线程变量。
threading.enumerate(): 返回一个包含正在运行的线程的list。正在运行指线程启动后、结束前,不包括启动前和终止后的线程。
threading.activeCount(): 返回正在运行的线程数量,与len(threading.enumerate())有相同的结果。
创建线程
- 普通创建方式
import threading
import time
def music():
print('begin to listen %s' % time.strftime('%Y-%m-%d %X', time.localtime()))
time.sleep(5)
print('stop to listen %s' % time.strftime('%Y-%m-%d %X', time.localtime()))
def game():
print('begin to play %s' % time.strftime('%Y-%m-%d %X', time.localtime()))
time.sleep(3)
print('stop to play %s' % time.strftime('%Y-%m-%d %X', time.localtime()))
if __name__ == '__main__':
t1 = threading.Thread(target=music)
t1.start()
t2 = threading.Thread(target=game)
t2.start()
# begin to listen 2019-07-20 13:35:57
# begin to play 2019-07-20 13:35:57
# stop to play 2019-07-20 13:36:00
# stop to listen 2019-07-20 13:36:02
- 继承threading.Thread来自定义线程类
import threading
class Mythread(threading.Thread):
def __init__(self, name):
super().__init__()
self.name = name
def run(self):
print(self.name)
if __name__ == '__main__':
t1 = Mythread('t1')
t1.start()
join()的用法
import threading
import time
def music():
print('begin to listen %s' % time.strftime('%Y-%m-%d %X', time.localtime()))
time.sleep(5)
print('stop to listen %s' % time.strftime('%Y-%m-%d %X', time.localtime()))
def game():
print('begin to play %s' % time.strftime('%Y-%m-%d %X', time.localtime()))
time.sleep(3)
print('stop to play %s' % time.strftime('%Y-%m-%d %X', time.localtime()))
if __name__ == '__main__':
t1 = threading.Thread(target=music)
t2 = threading.Thread(target=game)
t1.start()
t2.start()
# t1.join()
t2.join()
print('end')
begin to listen 2019-07-20 13:43:28
begin to play 2019-07-20 13:43:28
stop to play 2019-07-20 13:43:31
end
stop to listen 2019-07-20 13:43:33
4. 守护线程
无论是进程还是线程,都遵循:守护xxx会等待主xxx运行完毕后被销毁
需要强调的是:运行完毕并非终止运行
对主进程来说,运行完毕指的是主进程代码运行完毕
对主线程来说,运行完毕指的是主线程所在的进程内所有非守护线程统统运行完毕,主线程才算运行完毕
主进程在其代码结束后就已经算运行完毕了(守护进程在此时就被回收),然后主进程会一直等非守护的子进程都运行完毕后回收子进程的资源(否则会产生僵尸进程),才会结束,
主线程在其他非守护线程运行完毕后才算运行完毕(守护线程在此时就被回收)。因为主线程的结束意味着进程的结束,进程整体的资源都将被回收,而进程必须保证非守护线程都运行完毕后才能结束
from threading import Thread
import time
def sayhi(name):
time.sleep(2)
print('%s say hello' %name)
if __name__ == '__main__':
t=Thread(target=sayhi,args=('egon',))
t.setDaemon(True) #必须在t.start()之前设置
t.start()
print('主线程')
print(t.is_alive())
'''
主线程
True
'''
5. GIL
GIL本质就是一把互斥锁,既然是互斥锁,所有互斥锁的本质都一样,都是将并发运行变成串行,以此来控制同一时间内共享数据只能被一个任务所修改,进而保证数据安全。
GIL保护的是解释器级的数据
所有线程的任务,都需要将任务的代码当做参数传给解释器的代码去执行,即所有的线程要想运行自己的任务,首先需要解决的是能够访问到解释器的代码。
如果多个线程的target=work,那么执行流程是多个线程先访问到解释器的代码,即拿到执行权限,然后将target的代码交给解释器的代码去执行
解释器的代码是所有线程共享的,所以垃圾回收线程也可能访问到解释器的代码而去执行,这就导致了一个问题:对于同一个数据100,可能线程1执行x=100的同时,而垃圾回收执行的是回收100的操作,解决这种问题没有什么高明的方法,就是加锁处理,如下图的GIL,保证python解释器同一时间只能执行一个任务的代码

有了GIL的存在,同一时刻同一进程中只有一个线程被执行
#分析: 我们有四个任务需要处理,处理方式肯定是要玩出并发的效果,解决方案可以是: 方案一:开启四个进程 方案二:一个进程下,开启四个线程 #单核情况下,分析结果: 如果四个任务是计算密集型,没有多核来并行计算,方案一徒增了创建进程的开销,方案二胜 如果四个任务是I/O密集型,方案一创建进程的开销大,且进程的切换速度远不如线程,方案二胜 #多核情况下,分析结果: 如果四个任务是计算密集型,多核意味着并行计算,在python中一个进程中同一时刻只有一个线程执行用不上多核,方案一胜 如果四个任务是I/O密集型,再多的核也解决不了I/O问题,方案二胜 #结论:现在的计算机基本上都是多核,python对于计算密集型的任务开多线程的效率并不能带来多大性能上的提升,甚至不如串行(没有大量切换),但是,对于IO密集型的任务效率还是有显著提升的。
1 from multiprocessing import Process 2 from threading import Thread 3 import os,time 4 def work(): 5 res=0 6 for i in range(100000000): 7 res*=i 8 9 10 if __name__ == '__main__': 11 l=[] 12 print(os.cpu_count()) #本机为4核 13 start=time.time() 14 for i in range(4): 15 p=Process(target=work) #耗时5s多 16 p=Thread(target=work) #耗时18s多 17 l.append(p) 18 p.start() 19 for p in l: 20 p.join() 21 stop=time.time() 22 print('run time is %s' %(stop-start)) 23 24 计算密集型:多进程效率高
1 from multiprocessing import Process 2 from threading import Thread 3 import threading 4 import os,time 5 def work(): 6 time.sleep(2) 7 print('===>') 8 9 if __name__ == '__main__': 10 l=[] 11 print(os.cpu_count()) #本机为4核 12 start=time.time() 13 for i in range(400): 14 # p=Process(target=work) #耗时12s多,大部分时间耗费在创建进程上 15 p=Thread(target=work) #耗时2s多 16 l.append(p) 17 p.start() 18 for p in l: 19 p.join() 20 stop=time.time() 21 print('run time is %s' %(stop-start)) 22 23 I/O密集型:多线程效率高
6. 同步锁
锁的目的是为了保护共享的数据,同一时间只能有一个线程来修改共享的数据保护不同的数据就应该加不同的锁。
GIL 与Lock是两把锁,保护的数据不一样,前者是解释器级别的(当然保护的就是解释器级别的数据,比如垃圾回收的数据),后者是保护用户自己开发的应用程序的数据,很明显GIL不负责这件事,只能用户自定义加锁处理,即Lock
过程分析:所有线程抢的是GIL锁,或者说所有线程抢的是执行权限
线程1抢到GIL锁,拿到执行权限,开始执行,然后加了一把Lock,还没有执行完毕,即线程1还未释放Lock,有可能线程2抢到GIL锁,开始执行,执行过程中发现Lock还没有被线程1释放,于是线程2进入阻塞,被夺走执行权限,有可能线程1拿到GIL,然后正常执行到释放Lock。。。这就导致了串行运行的效果
锁的使用:
import threading R=threading.Lock() R.acquire() ''' 对公共数据的操作 ''' R.release()
#不加锁:并发执行,速度快,数据不安全
from threading import current_thread,Thread,Lock
import os,time
def task():
global n
print('%s is running' %current_thread().getName())
temp=n
time.sleep(0.5)
n=temp-1
if __name__ == '__main__':
n=100
lock=Lock()
threads=[]
start_time=time.time()
for i in range(100):
t=Thread(target=task)
threads.append(t)
t.start()
for t in threads:
t.join()
stop_time=time.time()
print('主:%s n:%s' %(stop_time-start_time,n))
'''
Thread-1 is running
Thread-2 is running
......
Thread-100 is running
主:0.5216062068939209 n:99
'''
#加锁:未加锁部分并发执行,加锁部分串行执行,速度慢,数据安全
from threading import current_thread,Thread,Lock
import os,time
def task():
#未加锁的代码并发运行
time.sleep(3)
print('%s start to run' %current_thread().getName())
global n
#加锁的代码串行运行
lock.acquire()
temp=n
time.sleep(0.5)
n=temp-1
lock.release()
if __name__ == '__main__':
n=100
lock=Lock()
threads=[]
start_time=time.time()
for i in range(100):
t=Thread(target=task)
threads.append(t)
t.start()
for t in threads:
t.join()
stop_time=time.time()
print('主:%s n:%s' %(stop_time-start_time,n))
'''
Thread-1 is running
Thread-2 is running
......
Thread-100 is running
主:53.294203758239746 n:0
'''
#有的同学可能有疑问:既然加锁会让运行变成串行,那么我在start之后立即使用join,就不用加锁了啊,也是串行的效果啊
#没错:在start之后立刻使用jion,肯定会将100个任务的执行变成串行,毫无疑问,最终n的结果也肯定是0,是安全的,但问题是
#start后立即join:任务内的所有代码都是串行执行的,而加锁,只是加锁的部分即修改共享数据的部分是串行的
#单从保证数据安全方面,二者都可以实现,但很明显是加锁的效率更高.
from threading import current_thread,Thread,Lock
import os,time
def task():
time.sleep(3)
print('%s start to run' %current_thread().getName())
global n
temp=n
time.sleep(0.5)
n=temp-1
if __name__ == '__main__':
n=100
lock=Lock()
start_time=time.time()
for i in range(100):
t=Thread(target=task)
t.start()
t.join()
stop_time=time.time()
print('主:%s n:%s' %(stop_time-start_time,n))
'''
Thread-1 start to run
Thread-2 start to run
......
Thread-100 start to run
主:350.6937336921692 n:0 #耗时是多么的恐怖
'''
7. 死锁与递归锁
所谓死锁: 是指两个或两个以上的进程或线程在执行过程中,因争夺资源而造成的一种互相等待的现象,若无外力作用,它们都将无法推进下去。此时称系统处于死锁状态或系统产生了死锁,这些永远在互相等待的进程称为死锁进程。
解决方法,递归锁,在Python中为了支持在同一线程中多次请求同一资源,python提供了可重入锁RLock。
这个RLock内部维护着一个Lock和一个counter变量,counter记录了acquire的次数,从而使得资源可以被多次require。直到一个线程所有的acquire都被release,其他的线程才能获得资源。上面的例子如果使用RLock代替Lock,则不会发生死锁:
mutexA=mutexB=threading.RLock() #一个线程拿到锁,counter加1,该线程内又碰到加锁的情况,则counter继续加1,这期间所有其他线程都只能等待,等待该线程释放所有锁,即counter递减到0为止
8. 信号量
Semaphore管理一个内置的计数器,
每当调用acquire()时内置计数器-1;
调用release() 时内置计数器+1;
计数器不能小于0;当计数器为0时,acquire()将阻塞线程直到其他线程调用release()。
实例:(同时只有5个线程可以获得semaphore,即可以限制最大连接数为5):
from threading import Thread,Semaphore
import threading
import time
# def func():
# if sm.acquire():
# print (threading.currentThread().getName() + ' get semaphore')
# time.sleep(2)
# sm.release()
def func():
sm.acquire()
print('%s get sm' %threading.current_thread().getName())
time.sleep(3)
sm.release()
if __name__ == '__main__':
sm=Semaphore(5)
for i in range(23):
t=Thread(target=func)
t.start()
9. Event
线程的一个关键特性是每个线程都是独立运行且状态不可预测。如果程序中的其他线程需要通过判断某个线程的状态来确定自己下一步的操作,这时线程同步问题就会变得非常棘手。为了解决这些问题,我们需要使用threading库中的Event对象。对象包含一个可由线程设置的信号标志,它允许线程等待某些事件的发生。在初始情况下,Event对象中的信号标志被设置为假。如果有线程等待一个Event对象, 而这个Event对象的标志为假,那么这个线程将会被一直阻塞直至该标志为真。一个线程如果将一个Event对象的信号标志设置为真,它将唤醒所有等待这个Event对象的线程。如果一个线程等待一个已经被设置为真的Event对象,那么它将忽略这个事件, 继续执行。
使用方法:
event.isSet():返回event的状态值;
event.wait():如果 event.isSet()==False将阻塞线程;
event.set(): 设置event的状态值为True,所有阻塞池的线程激活进入就绪状态, 等待操作系统调度;
event.clear():恢复event的状态值为False。
10. 线程queue
使用import queue, 用法与进程queue一样
- queue.Queue() 先进先出
import queue # 线程队列
q = queue.Queue(3) # 默认FIFO先进先出,3表示最多只能存3个数据
q.put(12)
q.put('hello')
q.put({'name': 'alex', 'age': 18})
while True:
data = q.get()
print(data)
运行结果:
12
hello
{'name': 'alex', 'age': 18}
- queue.LifoQueue() 先进后出
import queue
q = queue.LifoQueue(3)
q.put(12)
q.put('hello')
q.put({'name': 'alex', 'age': 18})
while True:
data = q.get()
print(data)
运行结果:
{'name': 'alex', 'age': 18}
hello
12
- queue.PriorityQueue() 优先级
import queue
q = queue.PriorityQueue(3)
q.put([2, 12])
q.put([1, 'hello'])
q.put([3, {'name': 'alex', 'age': 18}])
while True:
data = q.get()
print(data)
运行结果:
[1, 'hello']
[2, 12]
[3, {'name': 'alex', 'age': 18}]
三、协程
1. 什么是协程
协程:是单线程下的并发,又称微线程,纤程。英文名Coroutine。一句话说明什么是线程:协程是一种用户态的轻量级线程,即协程是由用户程序自己控制调度的
优点:
协程的切换开销更小,属于程序级别的切换,操作系统完全感知不到,因而更加轻量级
单线程内就可以实现并发的效果,最大限度地利用cpu
缺点:
协程的本质是单线程下,无法利用多核,可以是一个程序开启多个进程,每个进程内开启多个线程,每个线程内开启协程
协程指的是单个线程,因而一旦协程出现阻塞,将会阻塞整个线程
2. Greenlet
安装
pip3 install greenlet
#顺序执行
import time
def f1():
res=1
for i in range(100000000):
res+=i
def f2():
res=1
for i in range(100000000):
res*=i
start=time.time()
f1()
f2()
stop=time.time()
print('run time is %s' %(stop-start)) #10.985628366470337
#切换
from greenlet import greenlet
import time
def f1():
res=1
for i in range(100000000):
res+=i
g2.switch()
def f2():
res=1
for i in range(100000000):
res*=i
g1.switch()
start=time.time()
g1=greenlet(f1)
g2=greenlet(f2)
g1.switch()
stop=time.time()
print('run time is %s' %(stop-start)) # 52.763017892837524
greenlet只是提供了一种比generator更加便捷的切换方式,当切到一个任务执行时如果遇到io,那就原地阻塞,仍然是没有解决遇到IO自动切换来提升效率的问题。
3. Gevent
Gevent 是一个第三方库,可以轻松通过gevent实现并发同步或异步编程,在gevent中用到的主要模式是Greenlet, 它是以C扩展模块形式接入Python的轻量级协程。 Greenlet全部运行在主程序操作系统进程的内部,但它们被协作式地调度。
安装:
pip3 install gevent
用法:
g1=gevent.spawn(func,1,,2,3,x=4,y=5)创建一个协程对象g1,spawn括号内第一个参数是函数名,如eat,后面可以有多个参数,可以是位置实参或关键字实参,都是传给函数eat的 g2=gevent.spawn(func2) g1.join() #等待g1结束 g2.join() #等待g2结束 #或者上述两步合作一步:gevent.joinall([g1,g2]) g1.value#拿到func1的返回值
1 from gevent import monkey;monkey.patch_all() 2 from socket import * 3 import gevent 4 5 #如果不想用money.patch_all()打补丁,可以用gevent自带的socket 6 # from gevent import socket 7 # s=socket.socket() 8 9 def server(server_ip,port): 10 s=socket(AF_INET,SOCK_STREAM) 11 s.setsockopt(SOL_SOCKET,SO_REUSEADDR,1) 12 s.bind((server_ip,port)) 13 s.listen(5) 14 while True: 15 conn,addr=s.accept() 16 gevent.spawn(talk,conn,addr) 17 18 def talk(conn,addr): 19 try: 20 while True: 21 res=conn.recv(1024) 22 print('client %s:%s msg: %s' %(addr[0],addr[1],res)) 23 conn.send(res.upper()) 24 except Exception as e: 25 print(e) 26 finally: 27 conn.close() 28 29 if __name__ == '__main__': 30 server('127.0.0.1',8080)
四、IO模型
1. 阻塞IO与非阻塞IO(blocking IO nonblocking IO)
阻塞IO
几乎所有的程序员第一次接触到的网络编程都是从listen()、send()、recv() 等接口开始的,使用这些接口可以很方便的构建服务器/客户机的模型。然而大部分的socket接口都是阻塞型的。如下图
所谓阻塞型接口是指系统调用(一般是IO接口)不返回调用结果并让当前线程一直阻塞,只有当该系统调用获得结果或者超时出错时才返回。
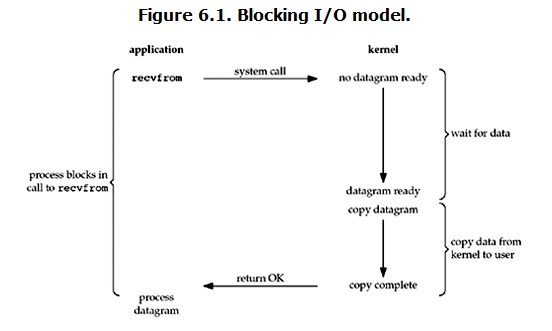
用户进程调用了recvfrom这个系统调用,kernel就开始了IO的第一个阶段:准备数据。对于network io来说,很多时候数据在一开始还没有到达(比如,还没有收到一个完整的UDP包),这个时候kernel就要等待足够的数据到来。而在用户进程这边,整个进程会被阻塞。当kernel一直等到数据准备好了,它就会将数据从kernel中拷贝到用户内存,然后kernel返回结果,用户进程才解除block的状态,重新运行起来。
所以,blocking IO的特点就是在IO执行的两个阶段都被block了。
实际上,除非特别指定,几乎所有的IO接口 ( 包括socket接口 ) 都是阻塞型的。这给网络编程带来了一个很大的问题,如在调用recv(1024)的同时,线程将被阻塞,在此期间,线程将无法执行任何运算或响应任何的网络请求。
非阻塞IO
linux下,可以通过设置socket使其变为non-blocking。当对一个non-blocking socket执行读操作时,流程是这个样子:
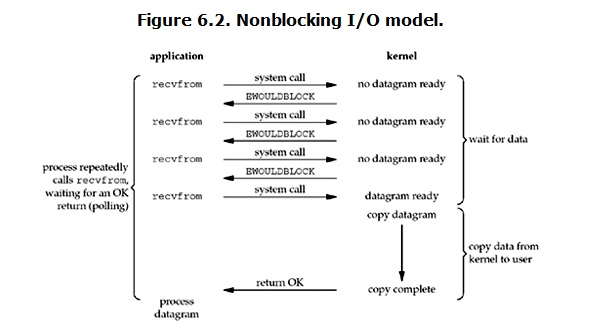
在网络IO时候,非阻塞IO也会进行recvform系统调用,检查数据是否准备好,与阻塞IO不一样,”非阻塞将大的整片时间的阻塞分成N多的小的阻塞, 所以进程不断地有机会 ‘被’ CPU光顾”。即每次recvform系统调用之间,cpu的权限还在进程手中,这段时间是可以做其他事情的,
当用户进程发出read操作时,如果kernel中的数据还没有准备好,那么它并不会block用户进程,而是立刻返回一个error。从用户进程角度讲 ,它发起一个read操作后,并不需要等待,而是马上就得到了一个结果。用户进程判断结果是一个error时,它就知道数据还没有准备好,于是它可以再次发送read操作。一旦kernel中的数据准备好了,并且又再次收到了用户进程的system call,那么它马上就将数据拷贝到了用户内存,然后返回。
所以,用户进程其实是需要不断的主动询问kernel数据好了没有。
也就是说非阻塞的recvform系统调用调用之后,进程并没有被阻塞,内核马上返回给进程,如果数据还没准备好,此时会返回一个error。进程在返回之后,可以干点别的事情,然后再发起recvform系统调用。重复上面的过程,循环往复的进行recvform系统调用。这个过程通常被称之为轮询。轮询检查内核数据,直到数据准备好,再拷贝数据到进程,进行数据处理。需要注意,拷贝数据整个过程,进程仍然是属于阻塞的状态。
优点:能够在等待任务完成的时间里干其他活了(包括提交其他任务,也就是 “后台” 可以有多个任务在“”同时“”执行)
2. IO多路复用(IO multiplexing)
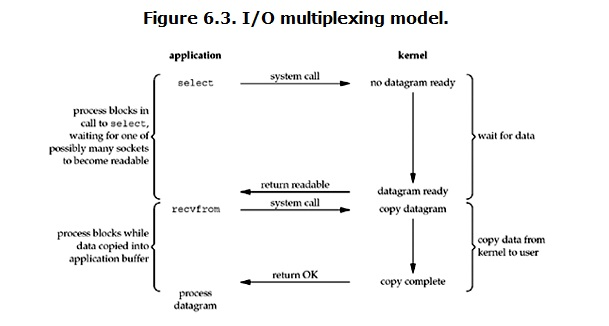
当用户进程调用了select,那么整个进程会被block,而同时,kernel会“监视”所有select负责的socket,当任何一个socket中的数据准备好了,select就会返回。这个时候用户进程再调用read操作,将数据从kernel拷贝到用户进程。
这个图和blocking IO的图其实并没有太大的不同,事实上,还更差一些。因为这里需要使用两个system call (select 和 recvfrom),而blocking IO只调用了一个system call (recvfrom)。但是,用select的优势在于它可以同时处理多个connection。(多说一句。所以,如果处理的连接数不是很高的话,使用select/epoll的web server不一定比使用multi-threading + blocking IO的web server性能更好,可能延迟还更大。select/epoll的优势并不是对于单个连接能处理得更快,而是在于能处理更多的连接。)
在IO multiplexing Model中,实际中,对于每一个socket,一般都设置成为non-blocking,但是,如上图所示,整个用户的process其实是一直被block的。只不过process是被select这个函数block,而不是被socket IO给block。
注意1:select函数返回结果中如果有文件可读了,那么进程就可以通过调用accept()或recv()来让kernel将位于内核中准备到的数据copy到用户区。
注意2: select的优势在于可以处理多个连接,不适用于单个连接
import socket
import select
sk = socket.socket(socket.AF_INET, socket.SOCK_STREAM)
sk.bind(('', 8080))
sk.listen(5)
rlist = [sk]
while True:
r, w, e = select.select(rlist, [], [], 5) # [sk, conn]
for i in r:
conn, addr = i.accept()
print('hello')
rlist.append(conn)
print('>>>>')
水平触发:也就是只有高电平(1)或低电平(0)时才触发通知,只要在这两种状态就能得到通知.上面提到的只要有数据可读(描述符就绪)那么水平触发的epoll就立即返回.select属于水平触发
边缘触发:只有电平发生变化(高电平到低电平,或者低电平到高电平)的时候才触发通知.上面提到即使有数据可读,但是没有新的IO活动到来,epoll也不会立即返回.
1 #***********************server.py 2 import socket 3 import select 4 sk=socket.socket() 5 sk.bind(("127.0.0.1",8801)) 6 sk.listen(5) 7 inputs=[sk,] 8 while True: 9 r,w,e=select.select(inputs,[],[],5) 10 print(len(r)) 11 12 for obj in r: 13 if obj==sk: 14 conn,add=obj.accept() 15 print(conn) 16 inputs.append(conn) 17 else: 18 data_byte=obj.recv(1024) 19 print(str(data_byte,'utf8')) 20 inp=input('回答%s号客户>>>'%inputs.index(obj)) 21 obj.sendall(bytes(inp,'utf8')) 22 23 print('>>',r) 24 25 #***********************client.py 26 27 import socket 28 sk=socket.socket() 29 sk.connect(('127.0.0.1',8801)) 30 31 while True: 32 inp=input(">>>>") 33 sk.sendall(bytes(inp,"utf8")) 34 data=sk.recv(1024) 35 print(str(data,'utf8'))
3. 异步IO
linux下的asynchronous IO其实用得很少。先看一下它的流程:
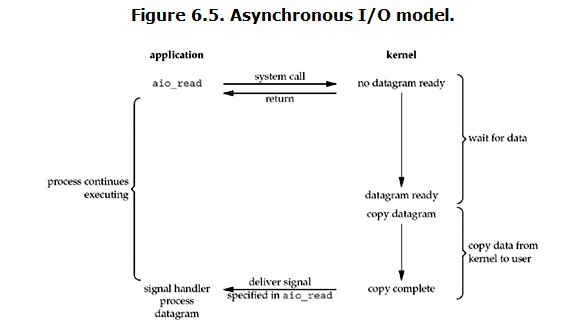
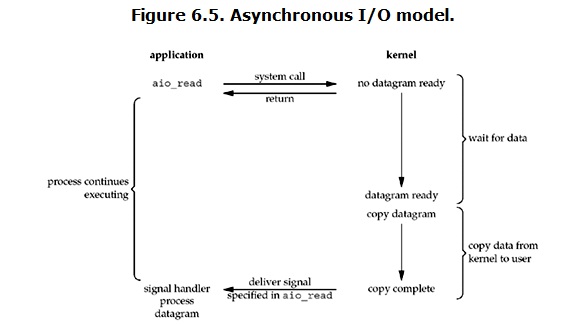
用户进程发起read操作之后,立刻就可以开始去做其它的事。而另一方面,从kernel的角度,当它受到一个asynchronous read之后,首先它会立刻返回,所以不会对用户进程产生任何block。然后,kernel会等待数据准备完成,然后将数据拷贝到用户内存,当这一切都完成之后,kernel会给用户进程发送一个signal,告诉它read操作完成了。
到目前为止,已经将四个IO Model都介绍完了。现在回过头来回答最初的那几个问题:blocking和non-blocking的区别在哪,synchronous IO和asynchronous IO的区别在哪。
先回答最简单的这个:blocking vs non-blocking。前面的介绍中其实已经很明确的说明了这两者的区别。调用blocking IO会一直block住对应的进程直到操作完成,而non-blocking IO在kernel还准备数据的情况下会立刻返回。
在说明synchronous IO和asynchronous IO的区别之前,需要先给出两者的定义。Stevens给出的定义(其实是POSIX的定义)是这样子的:
A synchronous I/O operation causes the requesting process to be blocked until that I/O operationcompletes;
An asynchronous I/O operation does not cause the requesting process to be blocked;
两者的区别就在于synchronous IO做”IO operation”的时候会将process阻塞。按照这个定义,之前所述的blocking IO,non-blocking IO,IO multiplexing都属于synchronous IO。有人可能会说,non-blocking IO并没有被block啊。这里有个非常“狡猾”的地方,定义中所指的”IO operation”是指真实的IO操作,就是例子中的recvfrom这个system call。non-blocking IO在执行recvfrom这个system call的时候,如果kernel的数据没有准备好,这时候不会block进程。但是,当kernel中数据准备好的时候,recvfrom会将数据从kernel拷贝到用户内存中,这个时候进程是被block了,在这段时间内,进程是被block的。而asynchronous IO则不一样,当进程发起IO 操作之后,就直接返回再也不理睬了,直到kernel发送一个信号,告诉进程说IO完成。在这整个过程中,进程完全没有被block。
注意:由于咱们接下来要讲的select,poll,epoll都属于IO多路复用,而IO多路复用又属于同步的范畴,故,epoll只是一个伪异步而已。
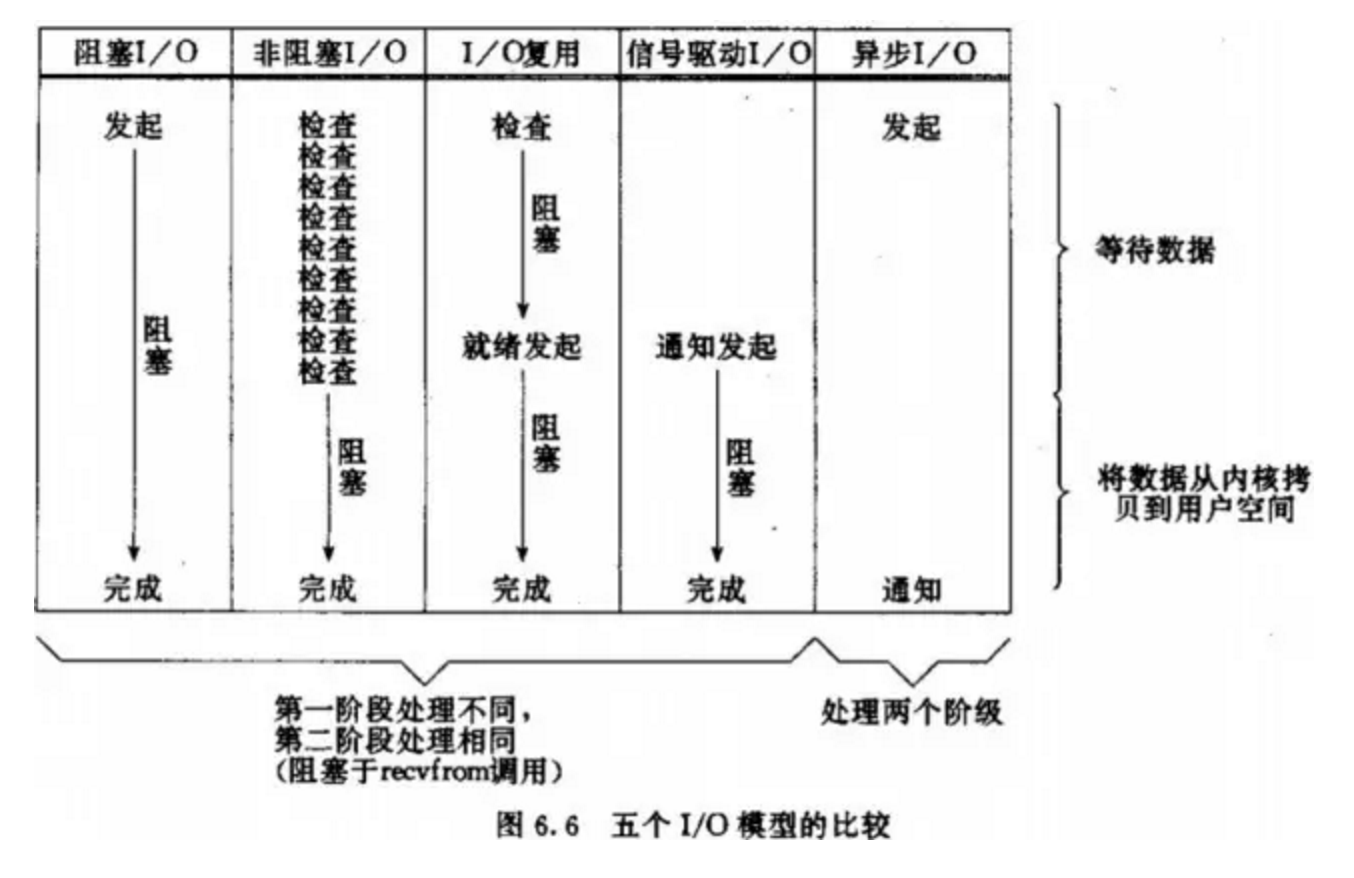
各个IO Model的比较如图所示:
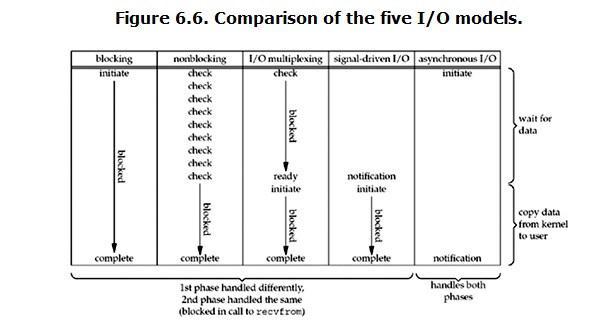

经过上面的介绍,会发现non-blocking IO和asynchronous IO的区别还是很明显的。在non-blocking IO中,虽然进程大部分时间都不会被block,但是它仍然要求进程去主动的check,并且当数据准备完成以后,也需要进程主动的再次调用recvfrom来将数据拷贝到用户内存。而asynchronous IO则完全不同。它就像是用户进程将整个IO操作交给了他人(kernel)完成,然后他人做完后发信号通知。在此期间,用户进程不需要去检查IO操作的状态,也不需要主动的去拷贝数据。
五种IO模型比较:
4. selectors模块
#服务端
from socket import *
import selectors
sel=selectors.DefaultSelector()
def accept(server_fileobj,mask):
conn,addr=server_fileobj.accept()
sel.register(conn,selectors.EVENT_READ,read)
def read(conn,mask):
try:
data=conn.recv(1024)
if not data:
print('closing',conn)
sel.unregister(conn)
conn.close()
return
conn.send(data.upper()+b'_SB')
except Exception:
print('closing', conn)
sel.unregister(conn)
conn.close()
server_fileobj=socket(AF_INET,SOCK_STREAM)
server_fileobj.setsockopt(SOL_SOCKET,SO_REUSEADDR,1)
server_fileobj.bind(('127.0.0.1',8088))
server_fileobj.listen(5)
server_fileobj.setblocking(False) #设置socket的接口为非阻塞
sel.register(server_fileobj,selectors.EVENT_READ,accept) #相当于网select的读列表里append了一个文件句柄server_fileobj,并且绑定了一个回调函数accept
while True:
events=sel.select() #检测所有的fileobj,是否有完成wait data的
for sel_obj,mask in events:
callback=sel_obj.data #callback=accpet
callback(sel_obj.fileobj,mask) #accpet(server_fileobj,1)
#客户端
from socket import *
c=socket(AF_INET,SOCK_STREAM)
c.connect(('127.0.0.1',8088))
while True:
msg=input('>>: ')
if not msg:continue
c.send(msg.encode('utf-8'))
data=c.recv(1024)
print(data.decode('utf-8'))

 浙公网安备 33010602011771号
浙公网安备 33010602011771号