
eigen 空间任意轴旋转
eigen 空间任意轴旋转
从一个以弧度为单位的角度和一个必须归一化的轴构造并初始化角度轴旋转。

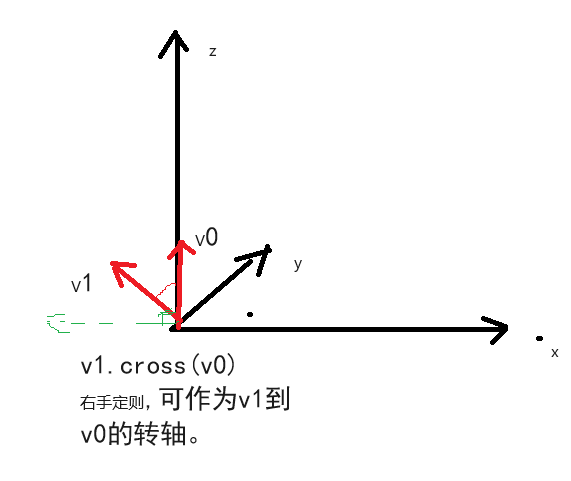
int main() { Eigen::AngleAxisd v_r(M_PI/4.0, Eigen::Vector3d(1.0,0,0));//任意轴旋转 Eigen::Quaterniond q(v_r); q.normalize(); Eigen::Vector3d t(0.1, 2.0, 3.0); //Eigen::AngleAxisd delta_r(M_PI / 4.0, Eigen::Vector3d(-0.7548, 0, 0).normalized());//任意轴旋转 转轴必须归一化 //Eigen::Quaterniond deltaQ(delta_r); //deltaQ.normalize(); //Eigen::Quaterniond q_final = (deltaQ*q).normalized(); Eigen::Vector3d v0(0, 0, 1.0); Eigen::Vector3d v0_t = q * v0 + t; Eigen::Vector3d v1 = v0_t - t; Eigen::Vector3d vv_x = v1.cross(v0); double radian_angle = atan2(v0.cross(v1).norm(), v1.transpose() * v0); Eigen::AngleAxisd delta_r(radian_angle, vv_x.normalized());//任意轴旋转 Eigen::Quaterniond deltaQ(delta_r); deltaQ.normalize(); Eigen::Quaterniond q_final = (deltaQ*q).normalized(); Eigen::Vector3d eulerAngle = q_final.matrix().eulerAngles(2, 1, 0); Eigen::Vector3d v_final = deltaQ * v1; return 0; }
示意图:


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 震惊!C++程序真的从main开始吗?99%的程序员都答错了
· 单元测试从入门到精通
· 【硬核科普】Trae如何「偷看」你的代码?零基础破解AI编程运行原理
· 上周热点回顾(3.3-3.9)
· winform 绘制太阳,地球,月球 运作规律