
实验室公开数据集
实验室公开数据集
- TUM-Mono: https://vision.in.tum.de/mono-dataset
- Kitti: Kitti odometry
- EuRoC: Euroc MAV dataset

TUM 链接:https://pan.baidu.com/s/1nwXtGqH 密码:lsgr KITTI 链接:https://pan.baidu.com/s/1htFmXDE 密码:uu20 DSO 链接:https://pan.baidu.com/s/1eSRmeZK 密码:6x5b Mono 链接:https://pan.baidu.com/s/1jKaNB3C 密码:u57r EuRoC 链接:https://pan.baidu.com/s/1miXf40o 密码:xm59 KITTI raw data:https://pan.baidu.com/s/1TyXbifoTHubu3zt4jZ90Wg 提取码: n9ys
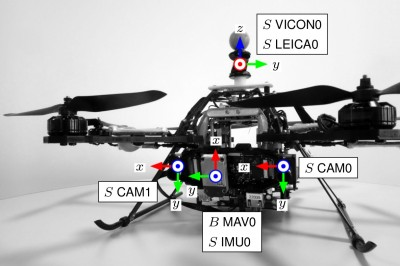
EuRoC MAV Dataset
Available Data Visual-Inertial Sensor Unit Stereo Images (Aptina MT9V034 global shutter, WVGA monochrome, 2×20 FPS) MEMS IMU (ADIS16448, angular rate and acceleration, 200 Hz) Shutter-centric temporal alignment Ground-Truth Vicon motion capture system (6D pose) Leica MS50 laser tracker (3D position) Leica MS50 3D structure scan Calibration Camera intrinsics Camera-IMU extrinsics Spatio-temporally aligned ground-truth

常用的数据集有:KITTI数据集、EuRoC数据集、TUM数据集、Oxford数据集、ICL-NUIM数据集、RGBD Object数据集等等。
KITTI数据集
KITTI数据集由德国卡尔斯鲁厄理工学院和丰田美国技术研究院联合创办,是目前国际上最大的自动驾驶场景下的计算机视觉算法评测数据集。该数据集用于评测立体图像(stereo),光流(optical flow),视觉测距(visual odometry),3D物体检测(object detection)和3D跟踪(tracking)等计算机视觉技术在车载环境下的性能。KITTI包含市区、乡村和高速公路等场景采集的真实图像数据,每张图像中最多达15辆车和30个行人,还有各种程度的遮挡与截断。
下载地址:http://www.cvlibs.net/datasets/kitti/eval_object.php
EuRoC数据集
EuRoC数据集包含11个双目序列,这些序列是由微型飞行器在两个不同的房间和一个大型工业环境中飞行时记录下来的。提供两种类型的数据集: 第一个包含来自Leica多站的三维位置地面真值,并着重于视觉惯性的评估SLAM算法在一个真实的工业场景。
下载地址:https://projects.asl.ethz.ch/datasets/doku.php?id=kmavvisualinertialdatasets
TUM数据集
数据集包含一些室内的序列,在不同的纹理下,不同的光照和不同的结构条件,从RGB-D传感器采集到的数据中分别去评估物体的重建和SLAM/视觉里程计的性能。TUM提供很多数据集,从各个有利位置捕获对象,每个条目中包含图像序列、相应的轮廓和完整的校准参数。
下载地址:https://vision.in.tum.de/data/datasets/rgbd-dataset/download
Oxford数据集
对牛津的一部分连续的道路进行了上百次数据采集,收集到了多种天气、行人和交通情况下的数据,也有建筑和道路施工时的数据,总的数据长度达1000小时以上。
下载地址:https://robotcar-dataset.robots.ox.ac.uk/
ICL-NUIM数据集
该集旨在对RGB-D、视觉测距和SLAM算法进行基准测试。两个不同的场景(起居室和办公室场景)提供了基本事实。客厅具有3D表面地面实况以及深度图和相机姿势,因此完美地适用于不仅用于标记相机轨迹而且还用于重建。办公室场景仅带有轨迹数据,并且没有任何明确的3D模型。
下载地址:http://www.doc.ic.ac.uk/~ahanda/VaFRIC/iclnuim.html
RGB-D对象数据集
RGB-D对象数据集是300个常见家庭对象的大型数据集。这些对象被分为51个类别。该数据集使用Kinect风格的3D相机来记录,该相机以30Hz记录同步和对准的640x480 RGB和深度图像。拍摄时将每个物体放置在转盘上旋转一整圈并捕获视频序列。对于每个对象,有3个视频序列,每个视频序列都安装在不同高度的摄像机上,以便从与地平线不同的角度观察对象。
下载地址:http://rgbd-dataset.cs.washington.edu/


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· AI与.NET技术实操系列:向量存储与相似性搜索在 .NET 中的实现
· 基于Microsoft.Extensions.AI核心库实现RAG应用
· Linux系列:如何用heaptrack跟踪.NET程序的非托管内存泄露
· 开发者必知的日志记录最佳实践
· SQL Server 2025 AI相关能力初探
· 震惊!C++程序真的从main开始吗?99%的程序员都答错了
· 单元测试从入门到精通
· 【硬核科普】Trae如何「偷看」你的代码?零基础破解AI编程运行原理
· 上周热点回顾(3.3-3.9)
· winform 绘制太阳,地球,月球 运作规律