相机模型2
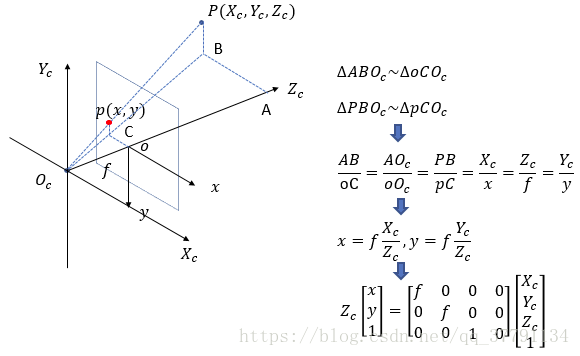
1、焦距

2、相机标定参数
内参矩阵: Intrinsic Matrix
焦距: Focal Length
主点: Principal Point
径向畸变: Radial Distortion
切向畸变: Tangential Distortion
旋转矩阵: Rotation Matrices
平移向量: Translation Vectors
平均重投影误差: Mean Reprojection Error
重投影误差: Reprojection Errors
重投影点: Reprojected Points
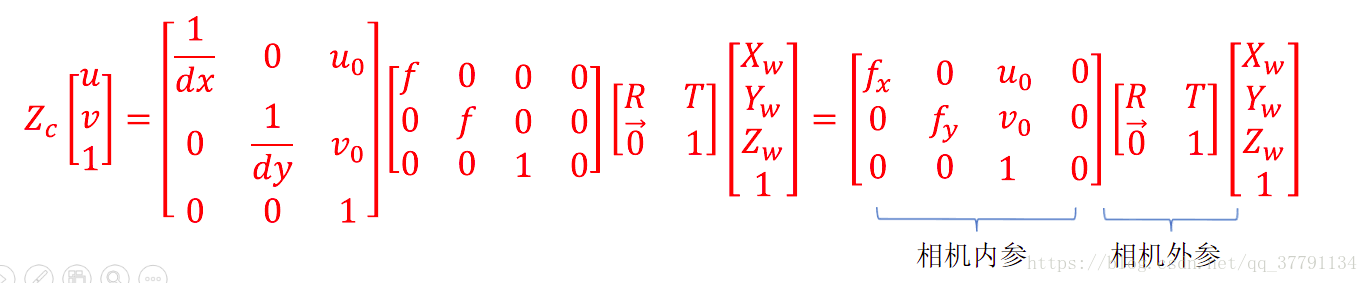
上面的式子也等于:MXw ,其中M成为投影矩阵,是相机内参矩阵和相机外参矩阵的乘积。
其中 f 为摄像机的焦距,单位一般是mm;dx,dy 为像元尺寸;u0,v0 为图像中心。fx = f/dx, fy = f/dy,分别称为x轴和y轴上的归一化焦距.
为更好的理解,举个实例:
现以NiKon D700相机为例进行求解其内参数矩阵:
就算大家身边没有这款相机也无所谓,可以在网上百度一下,很方便的就知道其一些参数——
焦距 f = 35mm 最高分辨率:4256×2832 传感器尺寸:36.0×23.9 mm
根据以上定义可以有:
u0= 4256/2 = 2128 v0= 2832/2 = 1416 dx = 36.0/4256 dy = 23.9/2832
fx = f/dx = 4137.8 fy = f/dy = 4147.3
就算大家身边没有这款相机也无所谓,可以在网上百度一下,很方便的就知道其一些参数——
焦距 f = 35mm 最高分辨率:4256×2832 传感器尺寸:36.0×23.9 mm
根据以上定义可以有:
u0= 4256/2 = 2128 v0= 2832/2 = 1416 dx = 36.0/4256 dy = 23.9/2832
fx = f/dx = 4137.8 fy = f/dy = 4147.3
其中相机的内参和外参可以通过张正友标定获取。通过最终的转换关系来看,一个三维中的坐标点,的确可以在图像中找到一个对应的像素点(为什么?你自己想想矩阵的运算,你就可以知道了),但是反过来,通过图像中的一个点找到它在三维中对应的点就很成了一个问题,因为我们并不知道等式左边的Zc的值。
参考:https://www.cnblogs.com/zipeilu/p/6658177.html
