中心投影变换解算 前后坐标
中心投影变换解算前后坐标
前言:文章的目的是为了通过三对 投影平面的点和三维空间中的点,解算出平面内其他点在三维空间中某个平面内的坐标。(这里只有对三维点的平面约束,才能解算出z;值得注意的是,三对点求解P3P问题往往会有多解(2个或者四个等),但是这个在本文中不影响,因为这里可以通过任一投影解来计算三维空间中平面内的坐标)
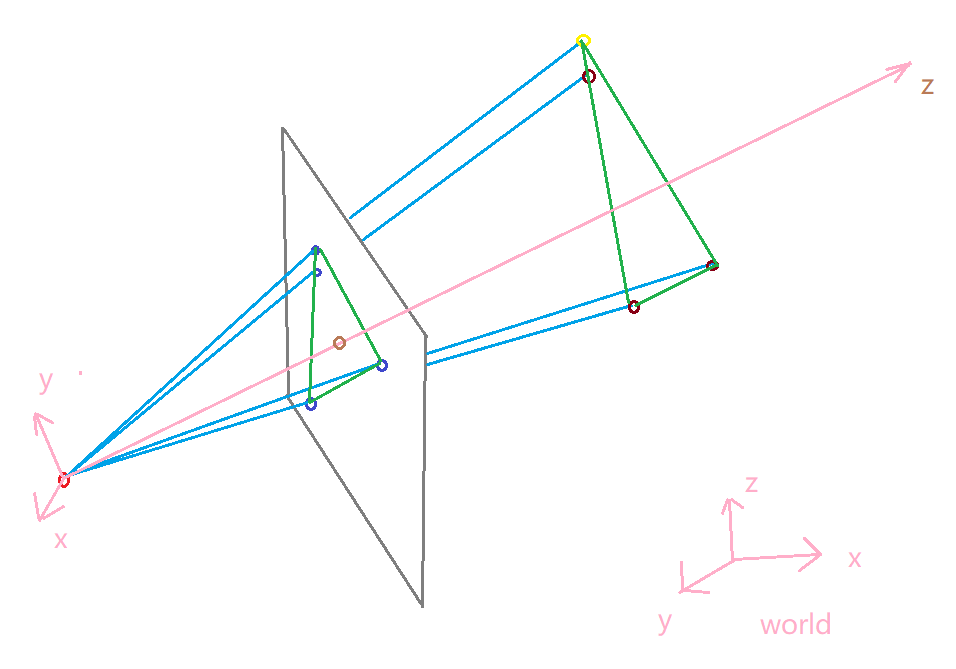
图1
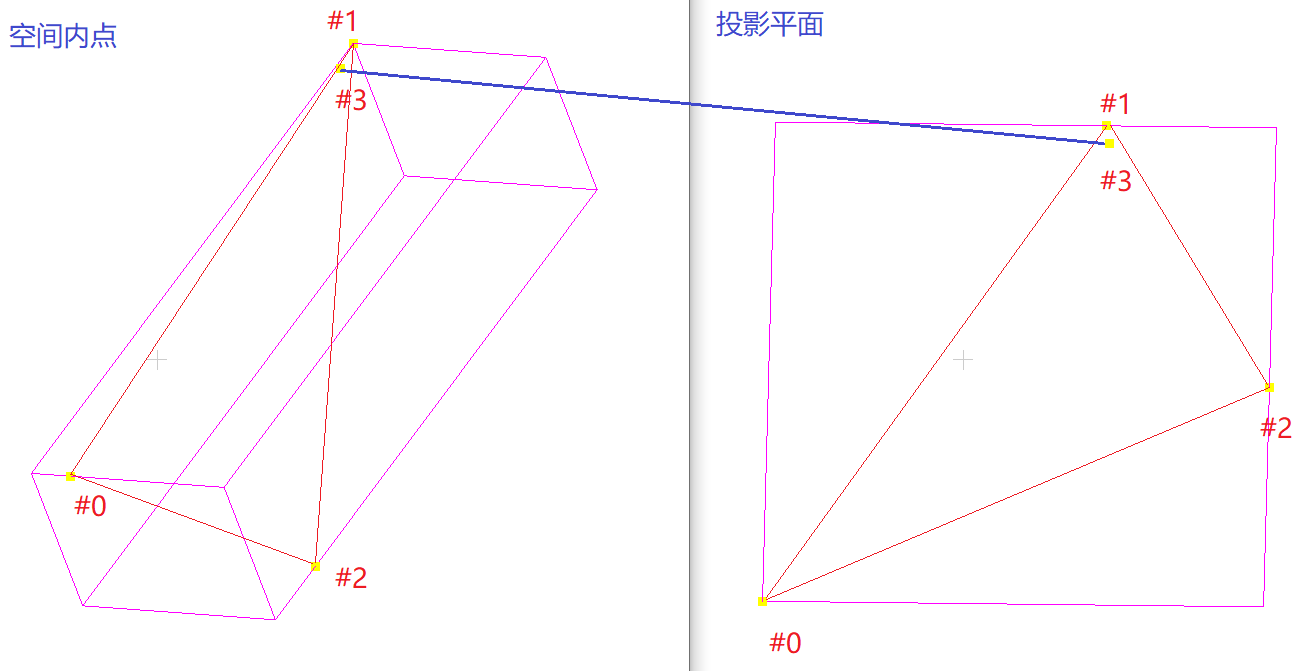
图2
//uvpoint caculate mesh point int GTexture::uv2world(cv::Mat& rvec, cv::Mat& tvec, Plane& pl, PointT& pt2d, PointT& pt3d) { cv::Mat rotationMatrix = cv::Mat(3, 3, cv::DataType<double>::type); cv::Rodrigues(rvec, rotationMatrix); PointT uvpoint; uvpoint.x = pt2d.x; uvpoint.y = pt2d.y; uvpoint.z = 1.0; double z[3]; // coefficient of z double con[3]; // const num of z cv::Mat rotation_inv = rotationMatrix.inv(); z[0] = rotation_inv.ptr<double>(0)[0] * uvpoint.x + rotation_inv.ptr<double>(0)[1] * uvpoint.y + rotation_inv.ptr<double>(0)[2] * uvpoint.z; z[1] = rotation_inv.ptr<double>(1)[0] * uvpoint.x + rotation_inv.ptr<double>(1)[1] * uvpoint.y + rotation_inv.ptr<double>(1)[2] * uvpoint.z; z[2] = rotation_inv.ptr<double>(2)[0] * uvpoint.x + rotation_inv.ptr<double>(2)[1] * uvpoint.y + rotation_inv.ptr<double>(2)[2] * uvpoint.z; con[0] = rotation_inv.ptr<double>(0)[0] * tvec.ptr<double>(0)[0]*(-1.0) + rotation_inv.ptr<double>(0)[1] * tvec.ptr<double>(0)[1] * (-1.0) + rotation_inv.ptr<double>(0)[2] * tvec.ptr<double>(0)[2] * (-1.0); con[1] = rotation_inv.ptr<double>(1)[0] * tvec.ptr<double>(0)[0] * (-1.0) + rotation_inv.ptr<double>(1)[1] * tvec.ptr<double>(0)[1] * (-1.0) + rotation_inv.ptr<double>(1)[2] * tvec.ptr<double>(0)[2] * (-1.0); con[2] = rotation_inv.ptr<double>(2)[0] * tvec.ptr<double>(0)[0] * (-1.0) + rotation_inv.ptr<double>(2)[1] * tvec.ptr<double>(0)[1] * (-1.0) + rotation_inv.ptr<double>(2)[2] * tvec.ptr<double>(0)[2] * (-1.0); //Plane pl; double temp = -1.0 * (con[0] * pl.A+ con[1] * pl.B + con[2] * pl.C + pl.D) / (z[0] * pl.A + z[1] * pl.B + z[2] * pl.C); pt3d.x = temp * z[0] + con[0]; pt3d.y = temp * z[1] + con[1]; pt3d.z = temp * z[2] + con[2]; return 0; }
