稀疏线程方程求解
二、稀疏矩阵分解
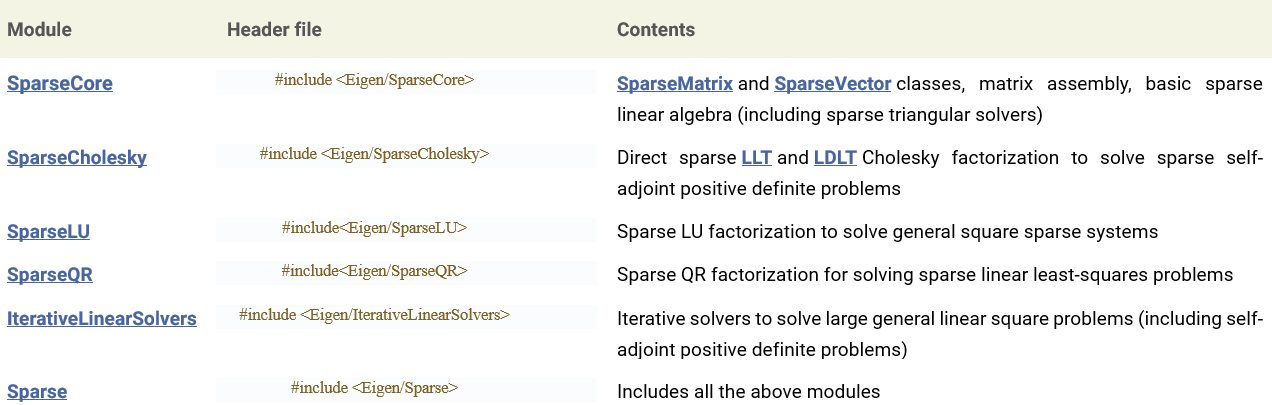
稀疏矩阵类
#include <Eigen/Sparse> #include <vector> #include <iostream> typedef Eigen::SparseMatrix<double> SpMat; // declares a column-major sparse matrix type of double typedef Eigen::Triplet<double> T; void buildProblem(std::vector<T>& coefficients, Eigen::VectorXd& b, int n); void saveAsBitmap(const Eigen::VectorXd& x, int n, const char* filename); int main(int argc, char** argv) { if(argc!=2) { std::cerr << "Error: expected one and only one argument.\n"; return -1; } int n = 300; // size of the image int m = n*n; // number of unknows (=number of pixels) // Assembly: std::vector<T> coefficients; // list of non-zeros coefficients Eigen::VectorXd b(m); // the right hand side-vector resulting from the constraints buildProblem(coefficients, b, n); SpMat A(m,m); A.setFromTriplets(coefficients.begin(), coefficients.end()); // Solving: Eigen::SimplicialCholesky<SpMat> chol(A); // performs a Cholesky factorization of A Eigen::VectorXd x = chol.solve(b); // use the factorization to solve for the given right hand side // Export the result to a file: saveAsBitmap(x, n, argv[1]); return 0; }
稀疏矩阵和向量声明 SparseMatrix<std::complex<float> > mat(1000,2000); // declares a 1000x2000 column-major compressed sparse matrix of complex<float> SparseMatrix<double,RowMajor> mat(1000,2000); // declares a 1000x2000 row-major compressed sparse matrix of double SparseVector<std::complex<float> > vec(1000); // declares a column sparse vector of complex<float> of size 1000 SparseVector<double,RowMajor> vec(1000); // declares a row sparse vector of double of size 1000 稀疏矩阵的填充(赋值) typedef Eigen::Triplet<double> T; std::vector<T> tripletList; tripletList.reserve(estimation_of_entries); for(...) { // ... tripletList.push_back(T(i,j,v_ij)); } SparseMatrixType mat(rows,cols); mat.setFromTriplets(tripletList.begin(), tripletList.end()); // mat is ready to go!
稀疏线性求解器
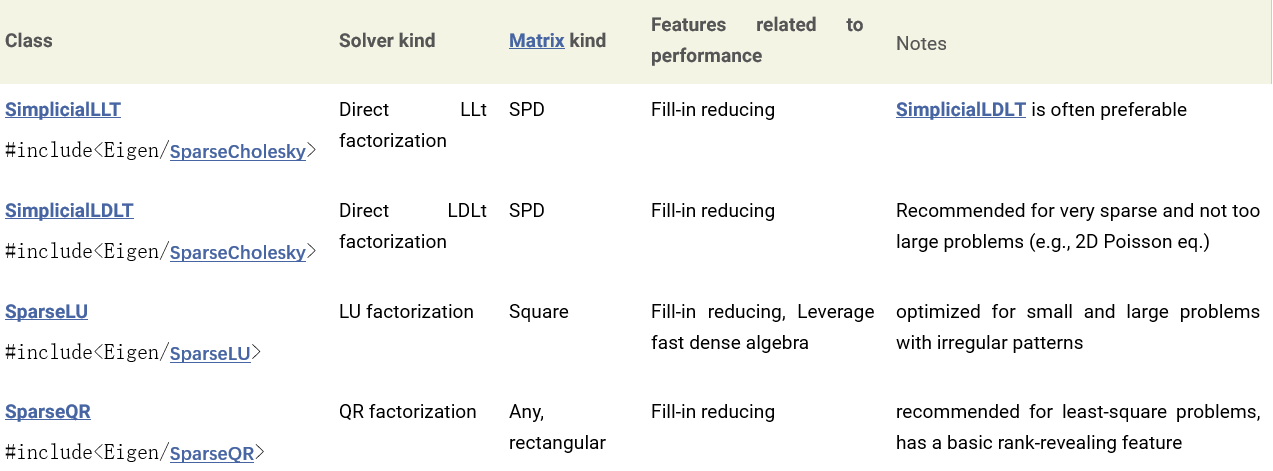
1、 直接法
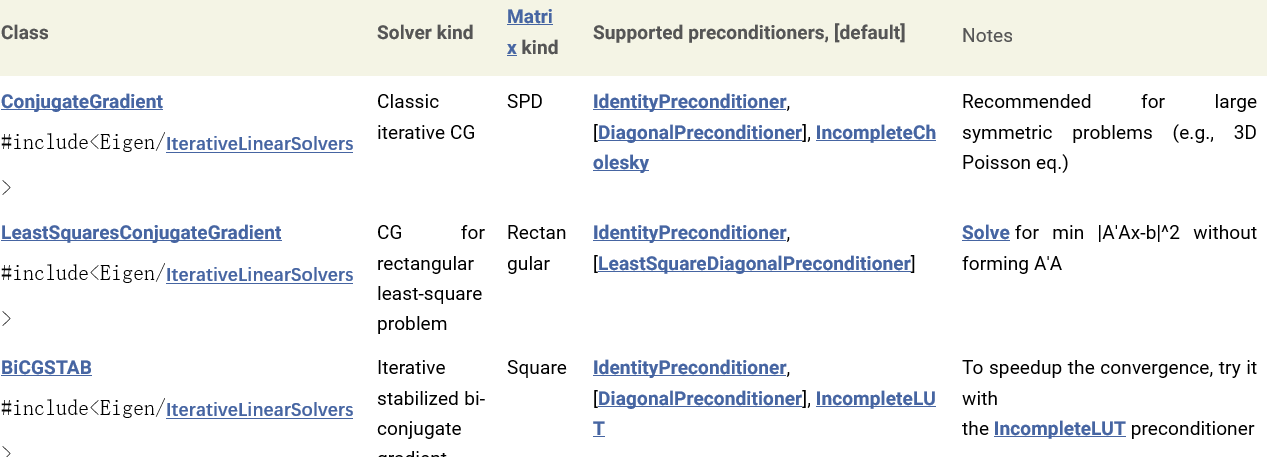
2、 迭代法