
lidar、深度相机与imu的相对位姿标定
lidar、深度相机与imu相对位姿标定
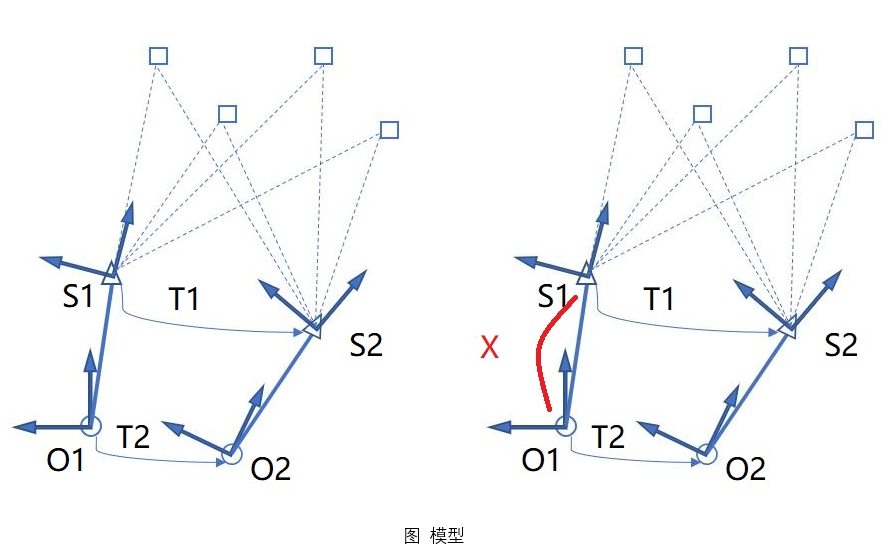
如图所示, O1、O2为IMU的传感器或者旋转平台定义的坐标系统,O1经过T2 变换到O2;S1、S2为深度相机或激光lidar的坐标系,S1经过T1 变换到S2;其中T1为寻找两次观测同名点解算得到,T2为IMU的传感器,或者编码器测量得到。
原理
首先根据几何关系很容易得到一下四个公式:

将(3)(4)代入(2)中,再将(1)代入得到: ![]() 所以重点是如何求解方程(5)中的X,这个问题可看成是求解最小二乘问题:
所以重点是如何求解方程(5)中的X,这个问题可看成是求解最小二乘问题:
![]()
求解求使误差平方和达到极小的X。当然这个最小二乘问题也是比较容易求解的,我们可以做如下转化:
![]()
所以AY=0就属于齐次坐标的最小二乘问题,对A做SVD分解,就可以的得到Y。
代码(略)
相机和 LiDAR 的外参标定是自动驾驶、机器人等领域中的关键任务,目的是将相机和 LiDAR 的坐标系对齐,以便进行多传感器融合。以下是一些常用的开源工具和程序,用于相机和 LiDAR 的外参标定:
1. Autoware Calibration Tools
- 简介:Autoware 是一个开源的自动驾驶软件栈,提供了相机和 LiDAR 的外参标定工具。
- 特点:
- 支持多种传感器(相机、LiDAR、IMU 等)的外参标定。
- 提供了基于标定板的标定方法,适合车辆或机器人上的传感器标定。
- 与 Autoware 生态系统无缝集成,适合自动驾驶应用。
- GitHub 地址:Autoware Calibration Tools
2. LiDAR-Camera Calibration (Livox 标定工具)
- 简介:Livox 是一家 LiDAR 制造商,提供了相机和 LiDAR 外参标定的开源工具。
- 特点:
- 支持 Livox LiDAR 和相机的标定。
- 提供了基于棋盘格的标定方法,适合静态标定场景。
- 标定过程简单,适合快速标定。
- GitHub 地址:Livox LiDAR-Camera Calibration
3. Kalibr
- 简介:Kalibr 是一个用于多传感器标定的开源工具,支持相机、IMU、LiDAR 等传感器的标定。
- 特点:
- 支持相机和 LiDAR 的外参标定。
- 提供了基于标定板的标定方法,适合静态标定场景。
- 支持多传感器融合,适合复杂的传感器系统。
- GitHub 地址:Kalibr
4. OpenCalib
- 简介:OpenCalib 是一个多传感器标定工具包,支持相机、LiDAR、IMU 等传感器的标定。
- 特点:
- 提供了相机和 LiDAR 的外参标定工具。
- 支持基于棋盘格和自然特征的标定方法。
- 适合自动驾驶和机器人应用。
- GitHub 地址:OpenCalib
5. LIO-SAM (Lidar Inertial Odometry and Mapping)
- 简介:LIO-SAM 是一个基于 LiDAR 和 IMU 的 SLAM 系统,但也提供了相机和 LiDAR 的外参标定功能。
- 特点:
- 支持相机和 LiDAR 的外参标定。
- 基于 SLAM 的标定方法,适合动态标定场景。
- 适合需要实时标定的应用。
- GitHub 地址:LIO-SAM
6. ROS Camera-LiDAR Calibration
- 简介:ROS 提供了多种相机和 LiDAR 标定的工具包,适合在 ROS 生态系统中进行传感器标定。
- 特点:
- 支持基于棋盘格的标定方法。
- 提供了 ROS 节点,方便与其他 ROS 模块集成。
- 适合在 ROS 生态系统中进行多传感器融合。
- GitHub 地址:ROS Camera-LiDAR Calibration
7. CaliCam
- 简介:CaliCam 是一个基于深度学习的相机和 LiDAR 外参标定工具。
- 特点:
- 使用深度学习模型进行相机和 LiDAR 的外参标定。
- 适合复杂场景下的标定,无需标定板。
- 标定精度较高,适合高精度应用。
- GitHub 地址:CaliCam
8. ApolloCalibration
- 简介:Apollo 是百度开源的自动驾驶平台,提供了相机和 LiDAR 的外参标定工具。
- 特点:
- 支持多种传感器(相机、LiDAR、IMU 等)的外参标定。
- 提供了基于标定板的标定方法,适合车辆或机器人上的传感器标定。
- 与 Apollo 生态系统无缝集成,适合自动驾驶应用。
- GitHub 地址:ApolloCalibration
总结:
- Autoware Calibration Tools:适合自动驾驶应用,支持多种传感器标定。
- Livox LiDAR-Camera Calibration:适合 Livox LiDAR 和相机的快速标定。
- Kalibr:适合多传感器标定,支持相机、IMU、LiDAR 等。
- OpenCalib:适合自动驾驶和机器人应用,支持多种标定方法。
- LIO-SAM:适合动态标定场景,基于 SLAM 的标定方法。
- ROS Camera-LiDAR Calibration:适合 ROS 生态系统,支持基于棋盘格的标定。
- CaliCam:基于深度学习的标定工具,适合复杂场景。
- ApolloCalibration:适合 Apollo 生态系统,支持多种传感器标定。
根据具体的应用场景和传感器类型,可以选择合适的开源工具进行相机和 LiDAR 的外参标定。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号