
5. 2d-Lidar 点云多直线拟合算法
具体步骤:
- EM+GMM(高斯模糊模型) 点云分割聚类算法的实现。
- 基于RANSAC单帧lidar数据直线拟合算法实现。
- 多帧lidar数据实时直线优化算法实现。
算法实现逻辑:
Struct line{ first line, end line}; std::vector<line> lineVector; if(EMGMM()get five custers){ for(int i=0, i<five, i++){ custers[i]; //对每一个custer进行RANSAC直线拟合。 bool isSuccess = RANSAC_getLines(…lineTemp); if (isSuccess){ lineVector.push_back(lineTemp); } …… } }else{ //exit(-1); } //直线优化算法 If(nowline与pastline 近似相等){ If(判断线段两端点到近似直线的距离 && 判断两端点是否在近似线段中间//阈值设置d<0.05){ //对直线进行融合优化。 }else{ //判断短直线进行剔除优化。 //保留直线 保存作为待优化。 } }else{ //判断短直线进行剔除优化。 //保留直线 保存作为待优化。 }
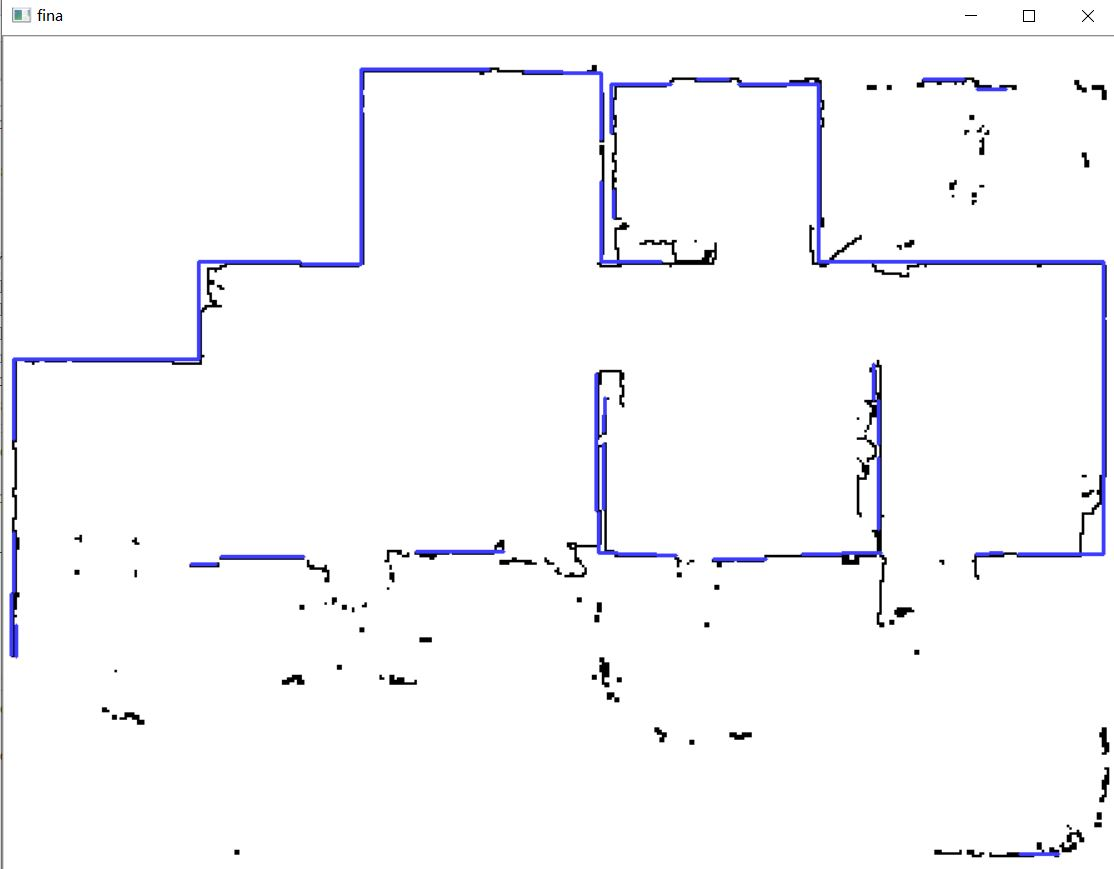
图1
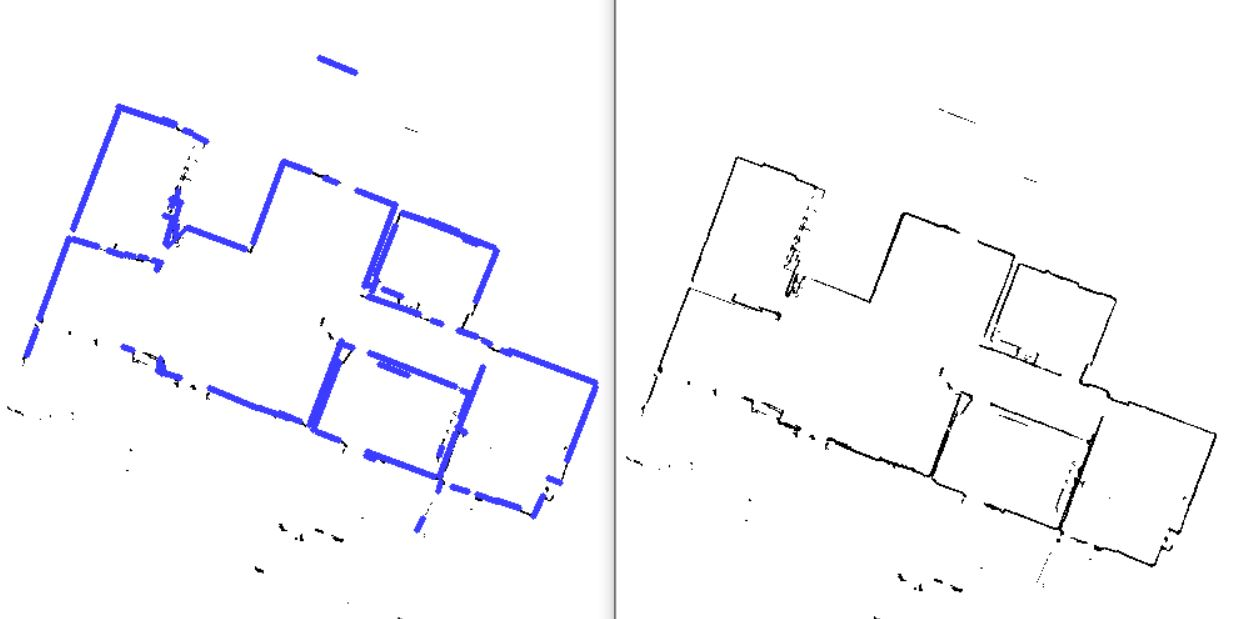
图2
参考:https://blog.csdn.net/u014568921/article/details/45049541

