会员
周边
众包
新闻
博问
闪存
赞助商
所有博客
当前博客
我的博客
我的园子
账号设置
简洁模式
...
退出登录
注册
登录
Love and Robot
博客园
首页
新随笔
联系
订阅
管理
上一页
1
2
3
下一页
2021年7月15日
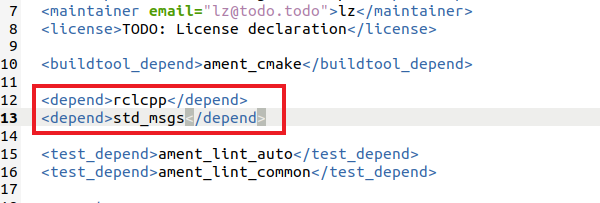
ROS2学习之旅(16)——创建自定义ROS2 msg和srv文件
摘要:
ROS2自定义消息类型...
阅读全文
posted @ 2021-07-15 11:31 Love&Robot
阅读(2695)
评论(0)
推荐(2)
编辑
ROS2学习之旅(15)——编写简单的服务和客户节点(C++)
摘要:
ROS2服务/客服通信...
阅读全文
posted @ 2021-07-15 10:28 Love&Robot
阅读(1952)
评论(0)
推荐(1)
编辑
2021年7月14日
ROS2学习之旅(14)——编写简单的发布者和订阅者(C++)
摘要:
使用C++编写发布者和订阅者...
阅读全文
posted @ 2021-07-14 23:59 Love&Robot
阅读(3167)
评论(2)
推荐(1)
编辑
ROS2学习之旅(13)——创建ROS2 功能包
摘要:
创建ROS2功能包...
阅读全文
posted @ 2021-07-14 23:51 Love&Robot
阅读(2387)
评论(0)
推荐(1)
编辑
ROS2学习之旅(12)——创建工作空间
摘要:
如何创建工作空间...
阅读全文
posted @ 2021-07-14 23:47 Love&Robot
阅读(1384)
评论(0)
推荐(1)
编辑
ROS2学习之旅(11)——记录和回放数据
摘要:
学会使用bag工具...
阅读全文
posted @ 2021-07-14 23:32 Love&Robot
阅读(1531)
评论(0)
推荐(0)
编辑
ROS2学习之旅(10)——创建一个launch文件
摘要:
建立一个launch文件...
阅读全文
posted @ 2021-07-14 23:16 Love&Robot
阅读(1309)
评论(0)
推荐(1)
编辑
2021年7月13日
ROS2学习之旅(9)——使用rqt_console
摘要:
学会使用rqt_console...
阅读全文
posted @ 2021-07-13 22:09 Love&Robot
阅读(643)
评论(0)
推荐(1)
编辑
ROS2学习之旅(8)——理解ROS2 Graph中的动作(Action)
摘要:
ROS2中的动作服务器...
阅读全文
posted @ 2021-07-13 22:05 Love&Robot
阅读(1115)
评论(0)
推荐(1)
编辑
ROS2学习之旅(7)——理解ROS2 Graph中的参数(Parameter)
摘要:
ROS2中的参数...
阅读全文
posted @ 2021-07-13 22:01 Love&Robot
阅读(758)
评论(0)
推荐(1)
编辑
上一页
1
2
3
下一页
公告
 ROS2自定义消息类型... 阅读全文
ROS2自定义消息类型... 阅读全文
ROS2服务/客服通信... 阅读全文
ROS2服务/客服通信... 阅读全文
ROS2自定义消息类型... 阅读全文
ROS2自定义消息类型... 阅读全文
ROS2服务/客服通信... 阅读全文
ROS2服务/客服通信... 阅读全文

 使用C++编写发布者和订阅者...
使用C++编写发布者和订阅者... 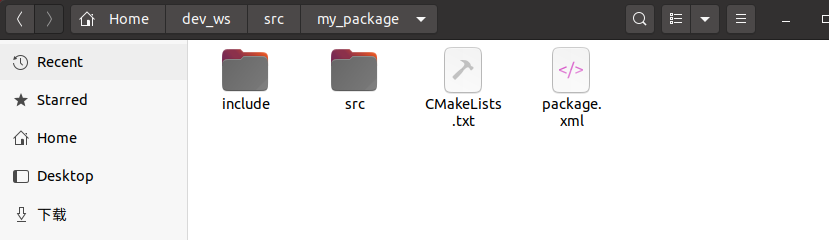 创建ROS2功能包...
创建ROS2功能包... 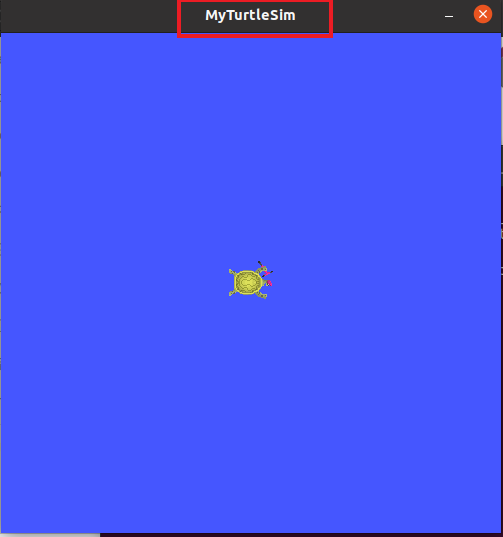 如何创建工作空间...
如何创建工作空间...  学会使用bag工具...
学会使用bag工具... 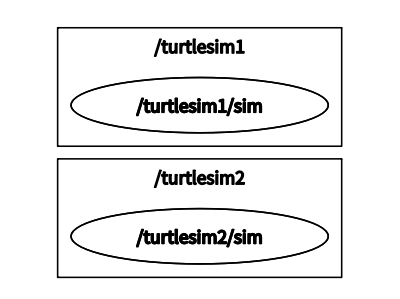 建立一个launch文件...
建立一个launch文件...  ROS2中的动作服务器...
ROS2中的动作服务器...  ROS2中的参数...
ROS2中的参数...