


Navigation 2学习之旅——Turtlebot 3仿真导航
 Turtlebot 3仿真导航...
Turtlebot 3仿真导航...
1.安装Nav 2
-
安装ROS 2
-
安装Nav 2软件包,命令为:
sudo apt install ros-<distro>-navigation2 ros-<distro>-nav2-bringup ros-<distro>-turtlebot3*如果系统为ubuntu 20.04,安装命令为:
sudo apt install ros-<distro>-navigation2 ros-<distro>-nav2-bringup '~ros-<distro>-turtlebot3-.*'
2.运行示例
-
打开终端。
-
设置环境变量:
source /opt/ros/<ros2-distro>/setup.bash export TURTLEBOT3_MODEL=waffle export GAZEBO_MODEL_PATH=$GAZEBO_MODEL_PATH:/opt/ros/<ros2-distro>/share/turtlebot3_gazebo/models -
在同一个终端运行:
ros2 launch nav2_bringup tb3_simulation_launch.py这个启动文件将使用AMCL定位程序在
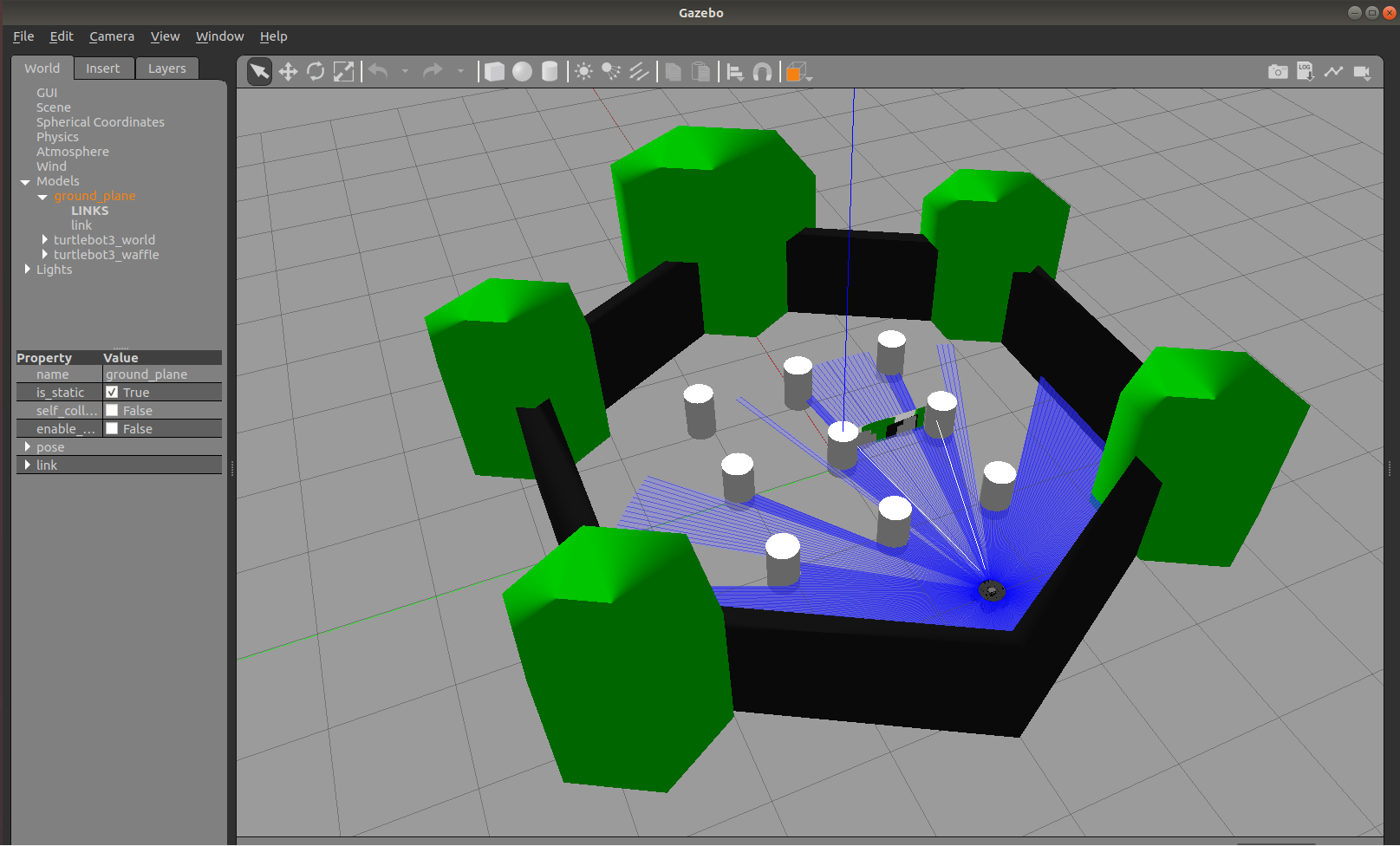
turtlebot3_world中启动Nav2,同时,还会启动机器人状态发布者节点以提供坐标转换、一个带有Turtlebot3 URDF的Gazebo实例以及RVIZ。如果一切正常启动,会看到RViz和Gazebo 如下:
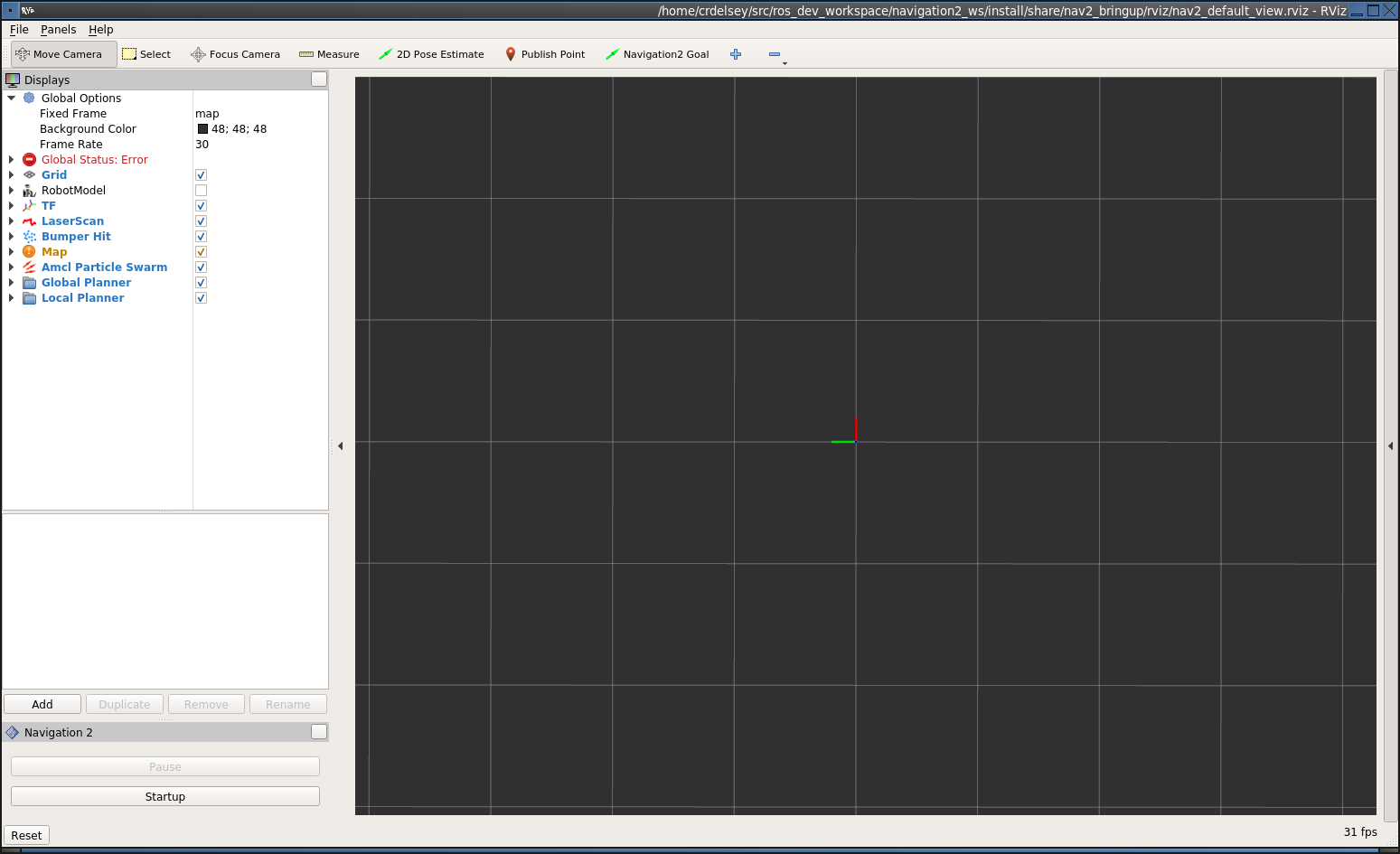
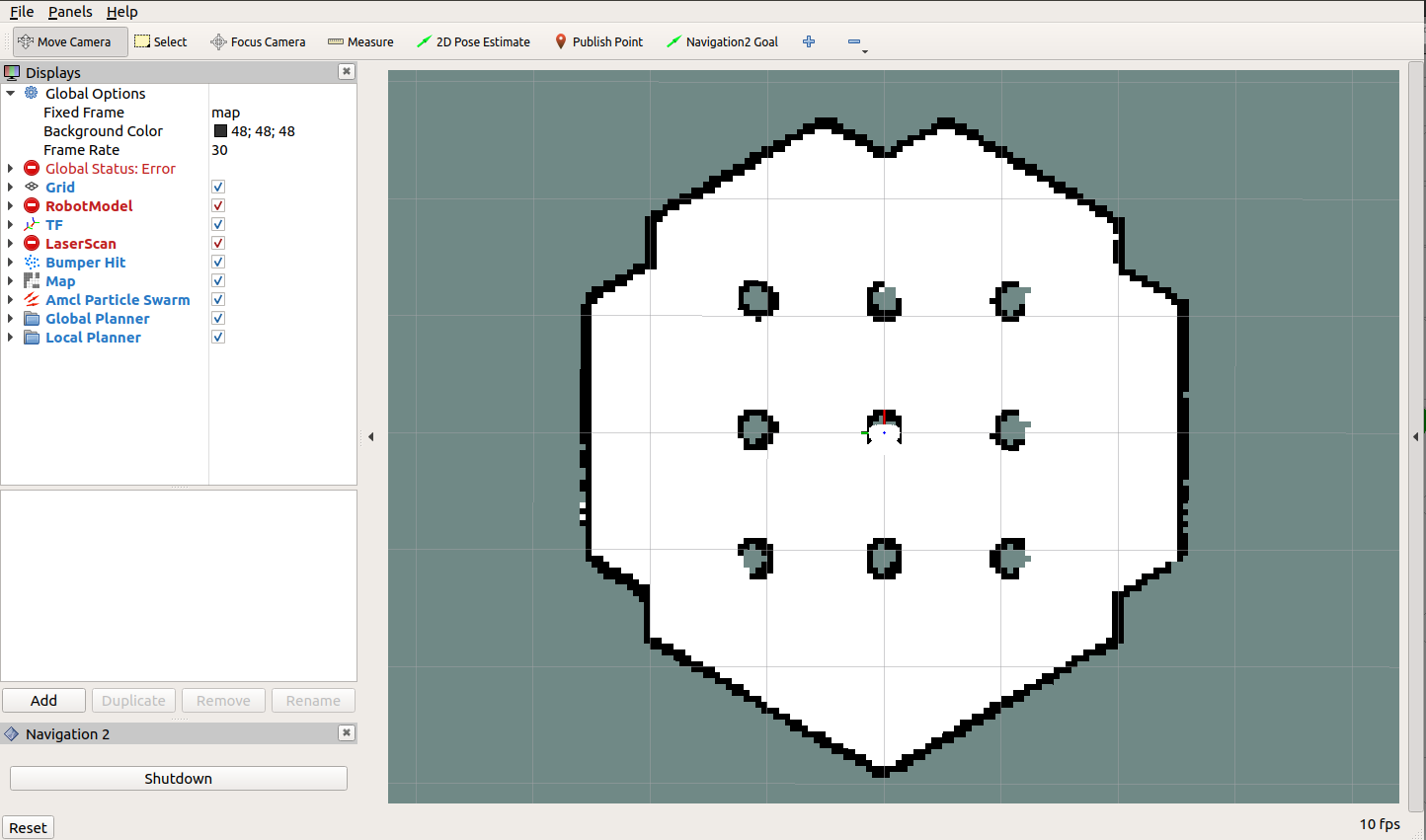
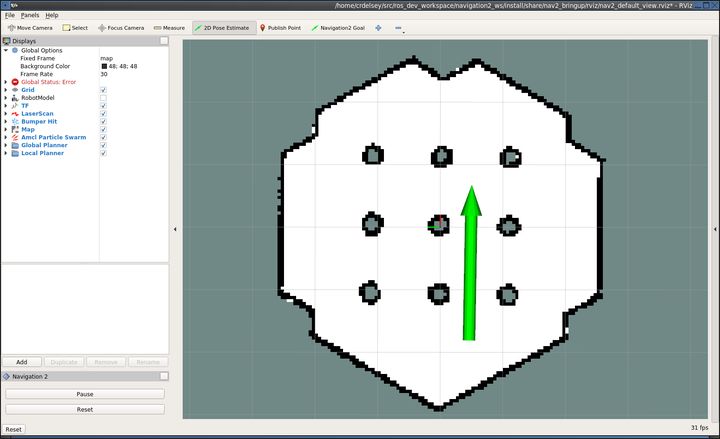
- 点击RViz左下角的“启动”按钮,使Nav2变为Active状态。此时显示地图:
3.导航
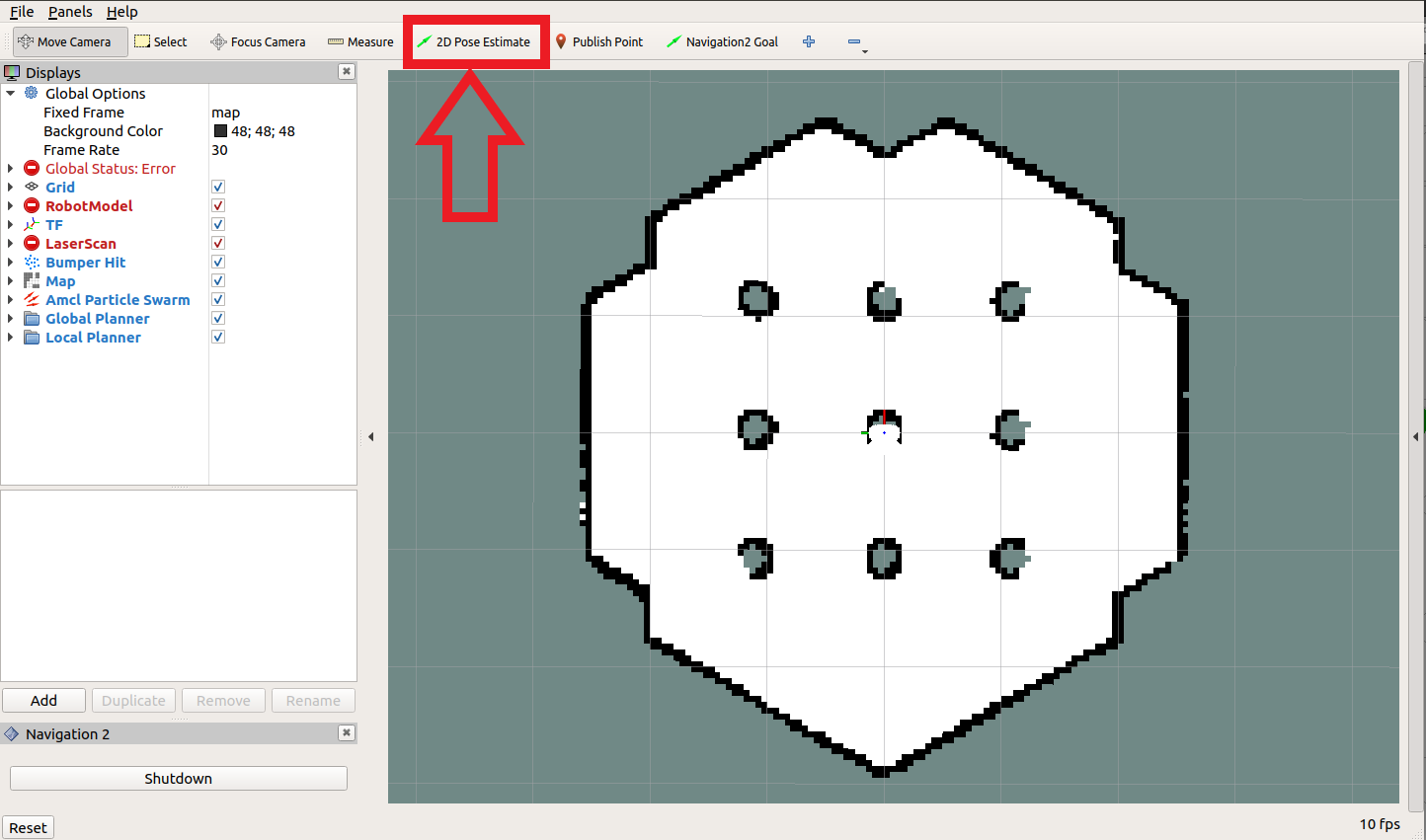
启动后,机器人最初不知道自己在哪里。默认情况下,Nav2会等待用户给它一个近似的起始位置。看看机器人在Gazebo世界中的位置,并在地图上找到那个位置。在RViz中点击“2D Pose Estmate”按钮设置初始姿态,然后在地图上点击该位置。可以通过点击拖动来设置方向。
如果您目前使用的是默认设置,那么机器人应该大致如下所示:
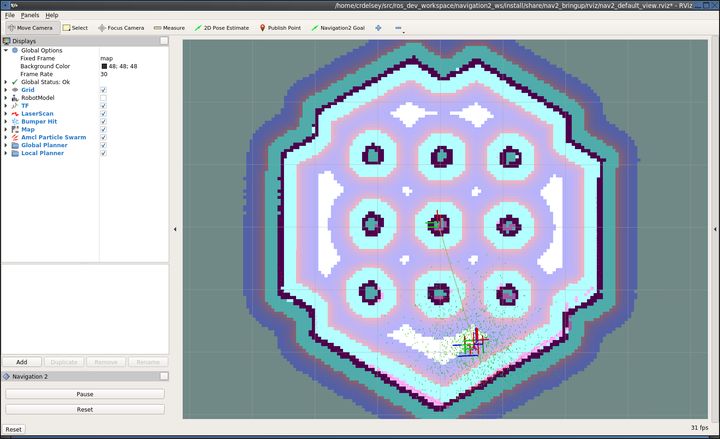
一旦设置好机器人初始位置后,就会完成坐标变换树,且Nav2会完全激活并准备就绪。现在应该可以看到机器人和点云:
接下来,点击“Navigaton2 Goal”按钮,选择目标。这将调用BT导航器通过动作服务器到达目标。可以通过Nav2 rviz插件暂停(取消)或重置操作(左下角)。
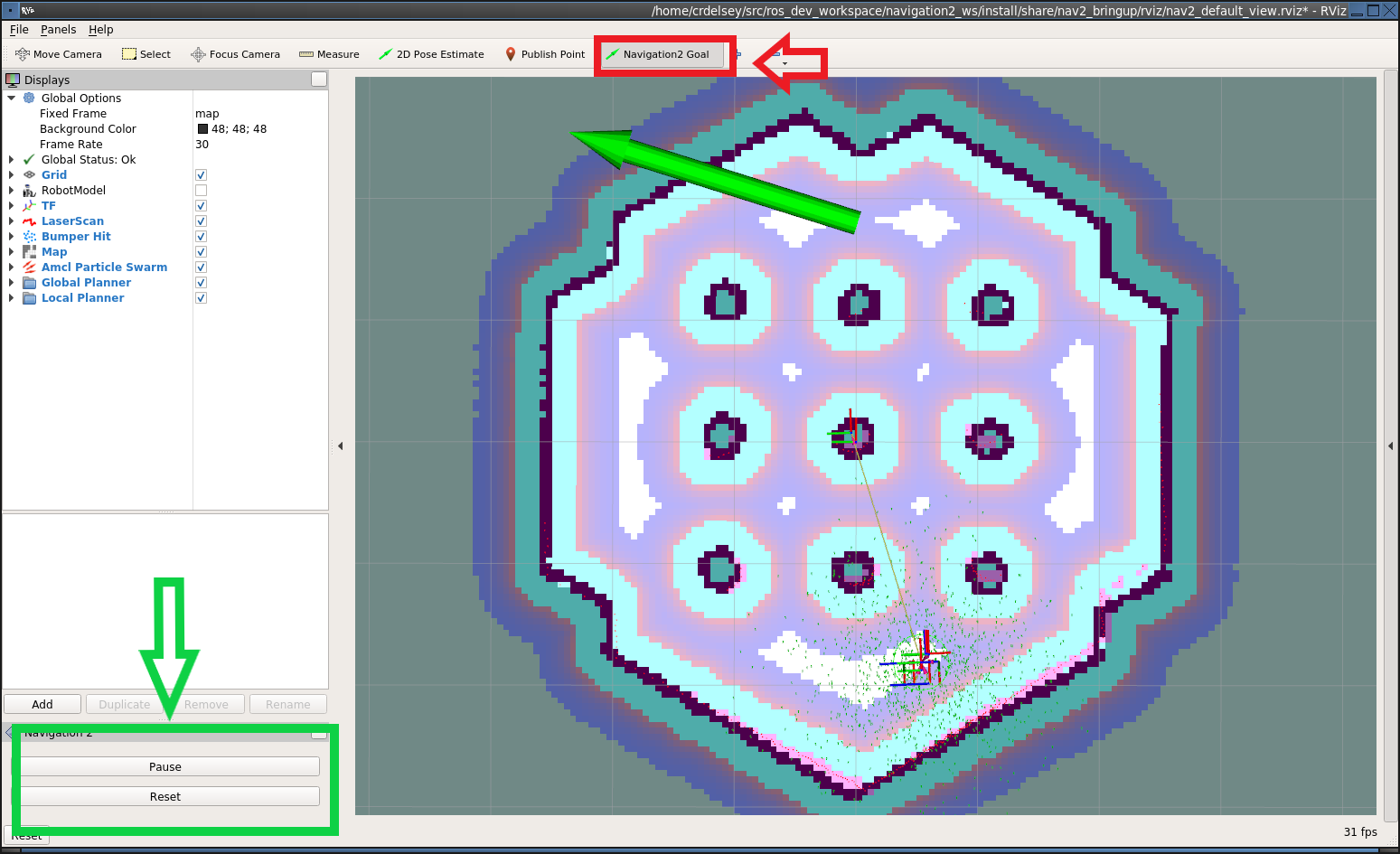
此时,就能看到机器人在移动:
如果给您带来帮助,希望能给点个关注,以后还会陆续更新有关机器人的内容,点个关注不迷路~欢迎大家一起交流学习。
都看到这了,点个推荐再走吧~
未经允许,禁止转载。

