6-2训练模型的三种方法
Pytorch通常需要用户编写自定义训练循环,训练循环的代码风格因人而异。
有三类典型的训练循环代码风格:脚本形式训练循环,函数形式训练循环,类型是训练循环。
下面以minis数据集的多分类模型的训练为例,演示这3种训练模型的风格。
import torch
import torchkeras
print('torch.__version__=' + torch.__version__)
print('torchkeras.__version__=' + torchkeras.__version__)
"""
torch.__version__=2.3.1+cu121
torchkeras.__version__=3.9.6
"""
1.准备数据
import torch
from torch import nn
import torchvision
from torchvision import transforms
transform = transforms.Compose([transforms.ToTensor()])
ds_train = torchvision.datasets.MNIST(root='./dataset/mnist/', train=True, download=True, transform=transform)
ds_val = torchvision.datasets.MNIST(root='./dataset/mnist/', train=False, download=True, transform=transform)
dl_train = torch.utils.data.DataLoader(ds_train, batch_size=128, shuffle=True, num_workers=4)
dl_val = torch.utils.data.DataLoader(ds_val, batch_size=128, shuffle=False, num_workers=4)
print(len(ds_train))
print(len(ds_val))
"""
60000
10000
"""
%matplotlib inline
%config InlineBackend.figure_format = 'svg'
# 查看部分样本
import matplotlib.pyplot as plt
plt.figure(figsize=(8, 8))
for i in range(9):
img, label = ds_train[i]
img = torch.squeeze(img)
ax = plt.subplot(3, 3, i+1)
ax.imshow(img.numpy())
ax.set_title("label = %d" % label)
ax.set_xticks([])
ax.set_yticks([])
plt.show()
2.脚本风格
脚本风格的训练训练非常常见。
net = nn.Sequential()
net.add_module("conv1",nn.Conv2d(in_channels=1,out_channels=32,kernel_size = 3))
net.add_module("pool1",nn.MaxPool2d(kernel_size = 2,stride = 2))
net.add_module("conv2",nn.Conv2d(in_channels=32,out_channels=64,kernel_size = 5))
net.add_module("pool2",nn.MaxPool2d(kernel_size = 2,stride = 2))
net.add_module("dropout",nn.Dropout2d(p = 0.1))
net.add_module("adaptive_pool", nn.AdaptiveMaxPool2d((1,1)))
net.add_module("flatten",nn.Flatten())
net.add_module("linear1",nn.Linear(64,32))
net.add_module("relu",nn.ReLU())
net.add_module("linear2",nn.Linear(32,10))
print(net)
"""
Sequential(
(conv1): Conv2d(1, 32, kernel_size=(3, 3), stride=(1, 1))
(pool1): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(conv2): Conv2d(32, 64, kernel_size=(5, 5), stride=(1, 1))
(pool2): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(dropout): Dropout2d(p=0.1, inplace=False)
(adaptive_pool): AdaptiveMaxPool2d(output_size=(1, 1))
(flatten): Flatten(start_dim=1, end_dim=-1)
(linear1): Linear(in_features=64, out_features=32, bias=True)
(relu): ReLU()
(linear2): Linear(in_features=32, out_features=10, bias=True)
)
"""
import os, sys, time
import numpy as np
import pandas as pd
import datetime
from tqdm import tqdm
import torch
from torch import nn
from copy import deepcopy
from torchmetrics import Accuracy
如果手动应用了 Softmax:使用 nn.NLLLoss,且其输入是 log 概率(log(softmax(x)))。
如果没有手动应用 Softmax:直接使用 nn.CrossEntropyLoss,输入为未经过处理的 logits。
通常情况下,为了避免不必要的复杂性和可能的数值问题,建议不要手动应用 Softmax,而是直接使用 nn.CrossEntropyLoss。
def printlog(info):
nowtime = datetime.datetime.now().strftime('%Y-%m-%d %H:%M:%S')
print("\n" + "========"*8 + "%s" % nowtime)
print(str(info) + "\n")
loss_fn = nn.CrossEntropyLoss()
optimizer = torch.optim.Adam(net.parameters(), lr=0.01)
metrics_dict = {"acc": Accuracy(task="multiclass", num_classes=10)}
epochs = 20
ckpt_path = 'checkpoint.pt'
# early_stopping相关设置
monitor = "val_acc"
patience = 5
mode = "max"
history = {}
for epoch in range(1, epochs+1):
print("Epoch {0} / {1}".format(epoch, epochs))
# 1 train
net.train()
total_loss, step = 0, 0
loop = tqdm(enumerate(dl_train), total=len(dl_train))
train_metrics_dict = deepcopy(metrics_dict)
for i, batch in loop:
features, labels = batch
# forward
preds = net(features)
loss = loss_fn(preds, labels)
# backward
loss.backward()
optimizer.step()
optimizer.zero_grad()
# metrics
step_metrics = {"train_" + name: metric_fn(preds, labels).item() for name, metric_fn in train_metrics_dict.items()}
step_log = dict({"train_loss": loss.item()}, **step_metrics)
total_loss += loss.item()
step += 1
if i != len(dl_train) - 1:
loop.set_postfix(**step_log)
else:
epoch_loss = total_loss / step
epoch_metrics = {"train_"+name: metric_fn.compute().item() for name, metric_fn in train_metrics_dict.items()}
epoch_log = dict({"train_loss": epoch_loss}, **epoch_metrics)
loop.set_postfix(**epoch_log)
for name, metric_fn in train_metrics_dict.items():
metric_fn.reset()
for name, metric in epoch_log.items():
history[name] = history.get(name, []) + [metric]
# 2 validate
net.eval()
total_loss, step = 0, 0
loop = tqdm(enumerate(dl_val), total=len(dl_val))
val_metrics_dict = deepcopy(metrics_dict)
with torch.no_grad():
for i, batch in loop:
features, labels = batch
# forward
preds = net(features)
loss = loss_fn(preds, labels)
# metrics
step_metrics = {"val_"+name: metric_fn(preds, labels).item() for name, metric_fn in val_metrics_dict.items()}
step_log = dict({"val_loss": loss.item()}, **step_metrics)
total_loss += loss.item()
step += 1
if i != len(dl_val) - 1:
loop.set_postfix(**step_log)
else:
epoch_loss = total_loss / step
epoch_metrics = {"val_"+name: metric_fn.compute().item() for name, metric_fn in val_metrics_dict.items()}
epoch_log = dict({"val_loss": epoch_loss}, **epoch_metrics)
loop.set_postfix(**epoch_log)
for name, metric_fn in val_metrics_dict.items():
metric_fn.reset()
epoch_log["epoch"] = epoch
for name, metric_fn in epoch_log.items():
history[name] = history.get(name, []) + [metric]
# 3 early stopping
arr_scores = history[monitor]
best_score_idx = np.argmax(arr_scores) if mode == "max" else np.argmin(arr_scores)
if best_score_idx == len(arr_scores) - 1:
torch.save(net.state_dict(), ckpt_path)
print(">>>>>>>>> reach best {0} : {1} >>>>>>>>>".format(monitor, arr_scores[best_score_idx]), file=sys.stderr)
if len(arr_scores) - best_score_idx > patience:
print(">>>>>>>>> {} without improvement in {} epoch, early stopping >>>>>>>>>".format(monitor, patience), file=sys.stderr)
break
net.load_state_dict(torch.load(ckpt_path))
df_history = pd.DataFrame(history)
3.函数风格
该风格在脚本形式上做了进一步的函数封装
class Net(nn.Module):
def __init__(self):
super().__init__()
self.layers = nn.ModuleList([
nn.Conv2d(in_channels=1,out_channels=32,kernel_size = 3),
nn.MaxPool2d(kernel_size = 2,stride = 2),
nn.Conv2d(in_channels=32,out_channels=64,kernel_size = 5),
nn.MaxPool2d(kernel_size = 2,stride = 2),
nn.Dropout2d(p = 0.1),
nn.AdaptiveMaxPool2d((1,1)),
nn.Flatten(),
nn.Linear(64,32),
nn.ReLU(),
nn.Linear(32,10)
])
def forward(self, x):
for layer in self.layers:
x = layer(x)
return x
net = Net()
print(net)
"""
Net(
(layers): ModuleList(
(0): Conv2d(1, 32, kernel_size=(3, 3), stride=(1, 1))
(1): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(2): Conv2d(32, 64, kernel_size=(5, 5), stride=(1, 1))
(3): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(4): Dropout2d(p=0.1, inplace=False)
(5): AdaptiveMaxPool2d(output_size=(1, 1))
(6): Flatten(start_dim=1, end_dim=-1)
(7): Linear(in_features=64, out_features=32, bias=True)
(8): ReLU()
(9): Linear(in_features=32, out_features=10, bias=True)
)
)
"""
import os, sys, time
import numpy as np
import pandas as pd
import datetime
from tqdm import tqdm
import torch
from torch import nn
from copy import deepcopy
def printlog(info):
nowtime = datetime.datetime.now().strftime('%Y-%m-%d %H:%M:%S')
print("\n"+"=========="*8 + "%s"%nowtime)
print(str(info)+"\n")
class StepRunner:
def __init__(self, net, loss_fn, stage="train", metrics_dict=None, optimizer=None):
self.net, self.loss_fn, self.metrics_dict, self.stage = net, loss_fn, metrics_dict, stage
self.optimizer = optimizer
def step(self, features, labels):
# loss
preds = self.net(features)
loss = self.loss_fn(preds, labels)
# backward
if self.optimizer is not None and self.stage == "train":
loss.backward()
self.optimizer.step()
self.optimizer.zero_grad()
# metrics
step_metrics = {self.stage+"_"+name: metric_fn(preds, labels).item() for name, metric_fn in self.metrics_dict.items()}
return loss.item(), step_metrics
def train_step(self, features, labels):
self.net.train() # 训练模式dropout层发生作用
return self.step(features, labels)
@torch.no_grad()
def eval_step(self, features, labels):
self.net.eval() # 预测模式 dropout层不发生作用
return self.step(features, labels)
def __call__(self, features, labels):
if self.stage == "train":
return self.train_step(features, labels)
else:
return self.eval_step(features, labels)
class EpochRunner:
def __init__(self, steprunner):
self.steprunner = steprunner
self.stage = steprunner.stage
def __call__(self, dataloader):
total_loss, step = 0, 0
loop = tqdm(enumerate(dataloader), total=len(dataloader))
for i, batch in loop:
loss, step_metrics = self.steprunner(*batch)
step_log = dict({self.stage+"_loss": loss}, **step_metrics)
total_loss += loss
step += 1
if i != len(dataloader) - 1:
loop.set_postfix(**step_log)
else:
epoch_loss = total_loss / step
epoch_metrics = {self.stage+"_"+name: metric_fn.compute().item() for name, metric_fn in self.steprunner.metrics_dict.items()}
epoch_log = dict({self.stage+"_loss": epoch_loss}, **epoch_metrics)
loop.set_postfix(**epoch_log)
for name, metric_fn in self.steprunner.metrics_dict.items():
metric_fn.reset()
return epoch_log
def train_model(net, optimizer, loss_fn, metrics_dict, train_data, val_data=None,
epochs=10, ckpt_path='checkpoint.pt', patience=5, monitor='val_loss', mode='min'):
history = {}
for epoch in range(1, epochs+1):
printlog("Epoch {0} / {1}".format(epoch, epochs))
# 1 train
train_step_runner = StepRunner(net=net, stage="train", loss_fn=loss_fn, metrics_dict=deepcopy(metrics_dict), optimizer=optimizer)
train_epoch_runner = EpochRunner(train_step_runner)
train_metrics = train_epoch_runner(train_data)
for name, metric in train_metrics.items():
history[name] = history.get(name, []) + [metric]
# 2 validate
if val_data:
val_step_runner = StepRunner(net=net, stage="val", loss_fn=loss_fn, metrics_dict=deepcopy(metrics_dict))
val_epoch_runner = EpochRunner(val_step_runner)
with torch.no_grad():
val_metrics = val_epoch_runner(val_data)
val_metrics["epoch"] = epoch
for name, metric in val_metrics.items():
history[name] = history.get(name, []) + [metric]
# 3 early stopping
arr_scores = history[monitor]
best_score_idx = np.argmax(arr_scores) if mode == "max" else np.argmin(arr_scores)
if best_score_idx==len(arr_scores)-1:
torch.save(net.state_dict(),ckpt_path)
print("<<<<<< reach best {0} : {1} >>>>>>".format(monitor,
arr_scores[best_score_idx]),file=sys.stderr)
if len(arr_scores)-best_score_idx>patience:
print("<<<<<< {} without improvement in {} epoch, early stopping >>>>>>".format(
monitor,patience),file=sys.stderr)
break
net.load_state_dict(torch.load(ckpt_path))
return pd.DataFrame(history)
from torchmetrics import Accuracy
loss_fn = nn.CrossEntropyLoss()
optimizer = torch.optim.Adam(net.parameters(), lr=0.01)
metrics_dict = {"acc": Accuracy(task="multiclass", num_classes=10)}
df_history = train_model(net, optimizer, loss_fn, metrics_dict, train_data=dl_train, val_data=dl_val, epochs=10, patience=3, monitor='val_acc', mode='max')
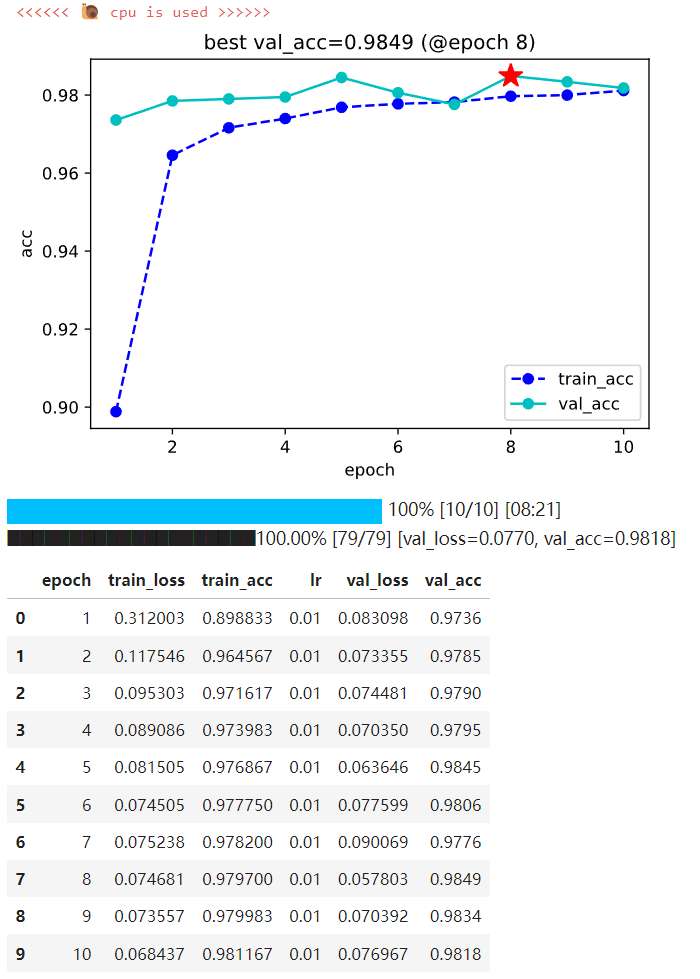
4.类风格
此处使用torchkeras.KerasModel高层次API接口中的fit方法训练模型。
使用该形式训练模型非常简洁明了。
from torchkeras import KerasModel
class Net(nn.Module):
def __init__(self):
super().__init__()
self.layers = nn.ModuleList([
nn.Conv2d(in_channels=1,out_channels=32,kernel_size = 3),
nn.MaxPool2d(kernel_size = 2,stride = 2),
nn.Conv2d(in_channels=32,out_channels=64,kernel_size = 5),
nn.MaxPool2d(kernel_size = 2,stride = 2),
nn.Dropout2d(p = 0.1),
nn.AdaptiveMaxPool2d((1,1)),
nn.Flatten(),
nn.Linear(64,32),
nn.ReLU(),
nn.Linear(32,10)]
)
def forward(self,x):
for layer in self.layers:
x = layer(x)
return x
net = Net()
print(net)
"""
Net(
(layers): ModuleList(
(0): Conv2d(1, 32, kernel_size=(3, 3), stride=(1, 1))
(1): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(2): Conv2d(32, 64, kernel_size=(5, 5), stride=(1, 1))
(3): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(4): Dropout2d(p=0.1, inplace=False)
(5): AdaptiveMaxPool2d(output_size=(1, 1))
(6): Flatten(start_dim=1, end_dim=-1)
(7): Linear(in_features=64, out_features=32, bias=True)
(8): ReLU()
(9): Linear(in_features=32, out_features=10, bias=True)
)
)
"""
from torchmetrics import Accuracy
model = KerasModel(net, loss_fn=nn.CrossEntropyLoss(), metrics_dict={"acc": Accuracy(task="multiclass", num_classes=10)},
optimizer=torch.optim.Adam(net.parameters(), lr=0.01))
model.fit(train_data=dl_train, val_data=dl_val, epochs=10, patience=3, monitor="val_acc", mode="max", plot=True, cpu=True)
作者:lotuslaw
出处:https://www.cnblogs.com/lotuslaw/p/18341856
版权:本作品采用「署名-非商业性使用-相同方式共享 4.0 国际」许可协议进行许可。
标签:
Pytorch




【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 阿里最新开源QwQ-32B,效果媲美deepseek-r1满血版,部署成本又又又降低了!
· 开源Multi-agent AI智能体框架aevatar.ai,欢迎大家贡献代码
· Manus重磅发布:全球首款通用AI代理技术深度解析与实战指南
· 被坑几百块钱后,我竟然真的恢复了删除的微信聊天记录!
· 没有Manus邀请码?试试免邀请码的MGX或者开源的OpenManus吧