

CORDIC算法:一种高效计算三角函数值的方法
By Long Luo
任何一款科学计算器上都可以计算三角函数,三角函数应用于生活工作中的方方面面,但计算机是如何计算三角函数值的呢?
三角函数本质上是直角三角形的3条边的比例关系,计算并没有很直观,那么计算机是如何计算三角函数值的呢?
在微积分中我们学习过 泰勒公式 ,我们知道可以使用泰勒展开式来对某个值求得其近似值,例如:
利用泰勒公式,取前 \(4\) 项:
代入可得:
可见取前 \(4\) 项时精度已经在 \(10^{-5}\) 之下,对于很多场合精度已经足够高了。
在没有了解 CORDIC(Coordinate Rotation Digital Computer) Algorithm [1] 算法之前,我一直以为计算器是利用泰勒公式去求解,最近才了解到原来在计算机中,CORDIC 算法远比泰勒公式高效。
下面我们就来了解下泰勒公式的不足之处和 CORDIC 算法是怎么做的。
泰勒公式的缺点
上一节我们使用泰勒公式去计算三角函数值时,需要做很多次乘法运算,而计算器中乘法运算是很昂贵的,其缺点如下所示:
- 展开过小则会导致展开精度不够,展开过大则会导致计算量过大;
- 幂运算需要使用乘法器,存在很多重复计算;
- 需要很多变量来存储中间值。
在之前的文章 矩阵乘法的 Strassen 算法 ,就是通过减少乘法,多做加法,从而大大降低了运算量,那么我们可以用相同的思想来优化运算吗?
当然可以,让我们请出今天的主角:CORDIC 算法。
解析 CORDIC 算法
我们知道单位圆上一点 \(P\) ,其坐标为:\((\cos \theta , \sin \theta )\) ,如下图所示:

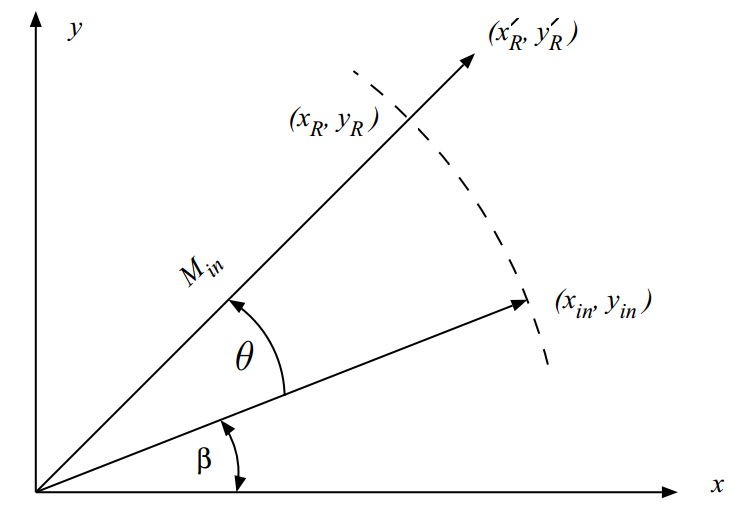
如果我们接收一个旋转向量 \(M_{in}\) 逆时针旋转 \(\theta\) ,将点 \(P(x_{in} , y_{in})\) 旋转到 \(P'(x_{R} , y_{R})\) , 如下图所示:
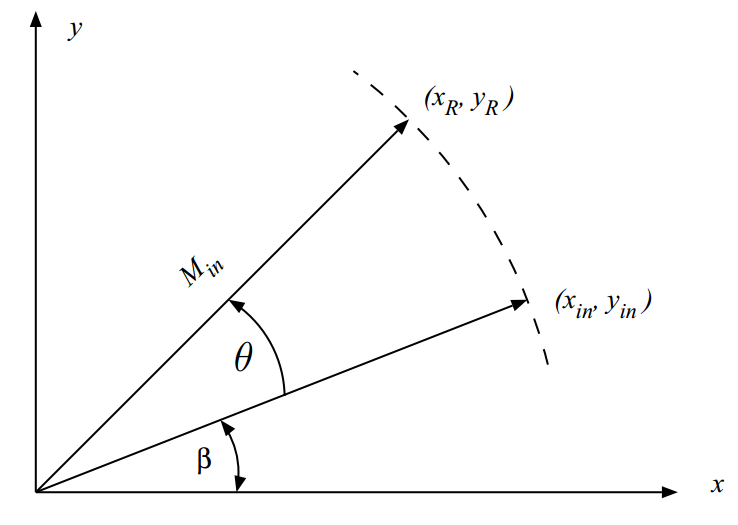
很容易得到如下公式:
实际上由 复数运算 ,我们知道复数乘法就是幅角相加,模长相乘。我们可以将上式写成下列矩阵运算形式:
但上式运算时,只是对向量 \(v_{in} = {\begin{bmatrix} x_{in} \\ y_{in} \end{bmatrix}}\) 进行了线性变换,乘以一个旋转向量 \(M_{in}\) ,得到了旋转后的结果:向量 \(v_{R} = {\begin{bmatrix} x_{R} \\ y_{R} \end{bmatrix}}\) 。
但是上式仍然需要 \(4\) 次乘法和 \(2\) 次加减法操作, 复杂度没有任何降低,那怎么办呢?
当当...当!
通过上述分析,我们已经知道可以使用有限次旋转操作来避免复杂的乘法操作,我们修改矩阵运算公式,提取 \(\cos (\theta )\) ,则公式可以修改为:
如果我们选择合适的角度值 \(\theta_i\),使得
这样和 \(\tan (\theta_{i})\) 乘法操作就变成了移位操作,我们知道计算机中移位操作是非常快的,就可以大大加快计算速度了。
但这里仍然有 \(3\) 个问题需要解决:
- 对于任意角度 ,可以通过满足条件的角度累加来得到在数学上相同的结果吗?
- 每次旋转得到的结果仍然需要乘以 \(\cos(\theta )\) ,这部分的计算成本如何?如何计算?
- 因为每次旋转角度 \(\theta = \arctan(2^{-i})\) ,朝着目标角度进行旋转时,可能会出现没有超过目标角度的情况,也会存在超过目标角度的情况,这种情况如何解决呢?
对于第一个问题,答案是否定的。可以从数学上证明只有 \(\angle 45^{\circ}\) 的倍数角才可以得到完全一致的结果。但是在工程应用中,我们只需要满足一定精度即可,可以增加迭代次数无限逼近原始角度,如下所示提高 \(n\) 值以无限逼近原始角度。
对于第二个问题,我们先来个例子,以 \(57.535^{\circ}\) 为例来看看求解过程:
那么第一次旋转:
第二次旋转:
第三次旋转:
综合可得:
因为 \(\tan (\theta_{i}) = 2^{-i}\) ,由三角公式可以计算出:
令 \(K_i = \cos(\theta_{i})\) ,则当进行 \(n\) 次迭代之后:
当 \(\theta_{i}\) 越来越小时, \(\cos \theta\) 也越来越逼近 \(1\) ,当迭代次数 \(n \to \infty\) , \(K(n)\) 极限存在,求解可得:
由 \(K\) 我们实际上可以得到最终的向量 \(v_R\) 的模长极限为:
实际上当迭代次数为 \(6\) 时,可以计算出缩放比例 \(K\) ,就已经精确到 \(0.6072\) 了,如下所示:
实际上,任意角度只要迭代次数超过 \(6\) ,我们可以直接使用 \(K = 0.6072\) 这个值。
对于第三个问题,稍微有点复杂,我们在下一节继续讲解!
角度累加
上一节遗留的问题是迭代旋转角度时,旋转角度不一定会落在目标角度内,我们需要引入一个角度误差,用来衡量旋转角度和目标角之间距离,如下所示:
当 \(\theta_{error} > 0\) 时,我们应该逆时针旋转,而 \(\theta_{error} < 0\) ,则顺时针旋转。根据精度需要,当 \(\left | \theta_{error} \right | \le \epsilon\) 即可退出迭代。
同时我们修改之前的公式,引入 \(\sigma_{i} \in \left \{ +1, -1 \right \}\) ,于是可以得到最终公式:
举个例子
上面讲了这么多,来个实例吧,练习巩固下知识,看看自己是否真的懂了?
计算 \(\sin 70^{\circ}\) 和 \(\cos 70^{\circ}\) 的值。
从 \(x_{in}=1, y_{in} = 0\) 开始,迭代 \(6\) 次结果如下:
| 第 \(i\) 次迭代 | \(\sigma_{i}\) | \(x \left[ i \right ]\) | \(y \left[ i \right ]\) | \(z \left[ i \right ]\) |
|---|---|---|---|---|
| - | - | \(1\) | \(0\) | \(70^{\circ}\) |
| \(0\) | \(1\) | \(1\) | \(1\) | \(25^{\circ}\) |
| \(1\) | \(1\) | \(0.5\) | \(1.5\) | \(-1.5651^{\circ}\) |
| \(2\) | \(-1\) | \(0.875\) | \(1.375\) | \(12.4711^{\circ}\) |
| \(3\) | \(1\) | \(0.7031\) | \(1.4844\) | \(5.3461^{\circ}\) |
| \(4\) | \(1\) | \(0.6103\) | \(1.5283\) | \(1.7698^{\circ}\) |
| \(5\) | \(1\) | \(0.5625\) | \(1.5474\) | \(-0.0201^{\circ}\) |
| \(6\) | \(-1\) | \(0.5867\) | \(1.5386\) | \(0.8751^{\circ}\) |
迭代到第 \(6\) 次时,角度误差已经小于 \(1^{\circ}\) 了, 通过表格可知:
通过计算器可知,\(\cos(70^{\circ}) = 0.34202\) ,\(\sin(70^{\circ}) = 0.93969\) ,误差已经在 \(\frac {1}{100}\) 之下了,实际应用中我们会迭代 \(16\) 次,误差会非常小。
在线 CORDIC 算法Demo
通过上面分析,我们已经知道了 CORDIC 算法的原理,下面就开始编程吧!
用 JavaScript 写了一个在线互动版本,传送门 → :
- 可以调整不同迭代次数,和系统库函数 \(\textit{Math.cos}\) ,\(\textit{Math.sin}\) 进行比较:
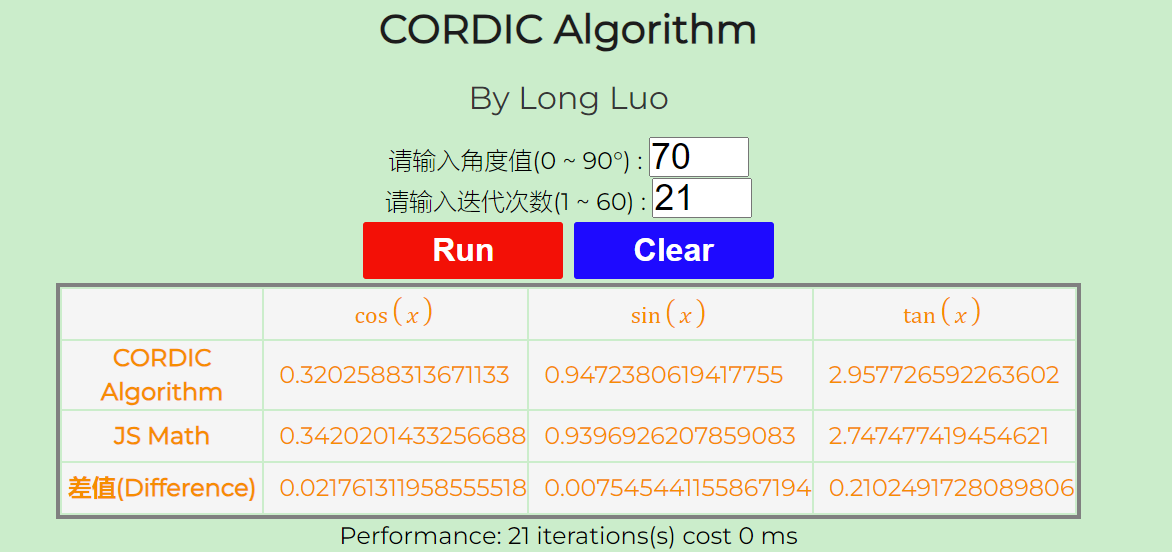
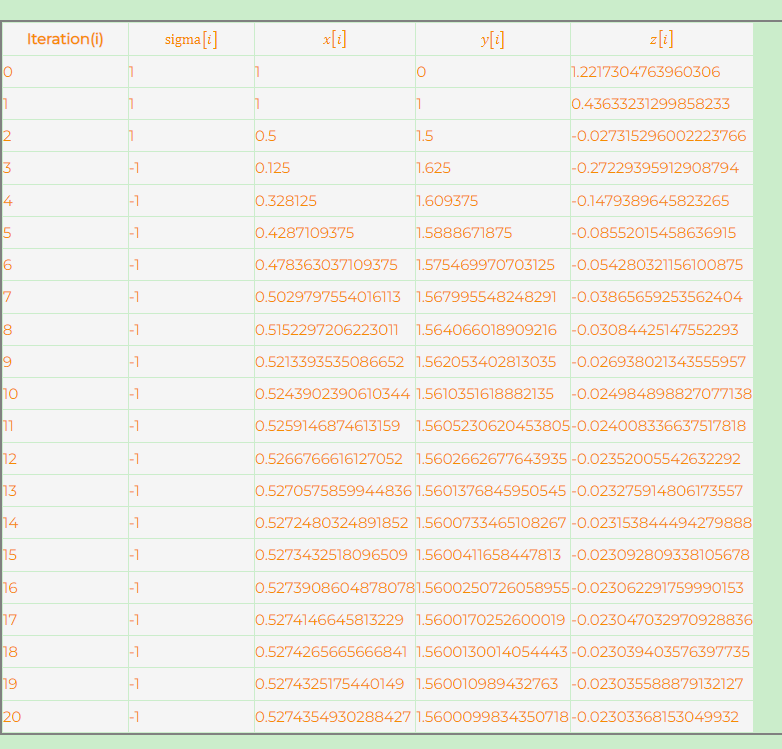
- 可以查看每次迭代的结果,掌握 Cordic 算法迭代原理:
CORDIC 算法的优点
CORDIC 算法相比其他算法的优点,体现在以下几个方面:
- 简化运算:CORDIC 算法主要使用位移、加法和减法等简单的运算,避免了复杂的乘法操作,从而提高了计算速度;
- 并行计算:CORDIC 算法的迭代操作是相互独立的,可以进行并行计算,利用现代计算机的多核优势,进一步提升计算效率;
- 硬件优化:CORDIC 算法适用于硬件实现,可以通过专用硬件电路(如FPGA)进行加速,极大地提高计算速度;
- 低存储需求:CORDIC 算法只需存储一小组预先计算好的旋转角度,节省了存储空间;
- 迭代控制:通过控制迭代次数,可以平衡计算精度和计算速度,根据需求进行调整。
总结
CORDIC 算法是一种高效计算三角函数值的方法。相比传统的泰勒展开式,它具有简单高效、低存储需求和迭代控制等优势。在需要计算三角函数值的应用中,CORDIC 算法更快速、更节省资源。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号