
1、原理
这种控制必须精确地确定对象模型,首先将操作人员(专家)长期实践积累的经验知识用控制规则模型化,然后运用推理便可对PID参数实现最佳调整。
自适应模糊PID控制器以误差e和误差变化ec作为输入,可以满足不同时刻的e和ec对PID参数自整定的要求。利用模糊控制规则在线对PID参数进行修改,便构成了自适应模糊PID控制器,其结构如图4-17所示。
离散PID控制算法为:

式中, k为采样序号,T 为采样时间。

PID参数模糊自整定是找出PID三个参数 Kp, Ki, Kd 与e和ec之间的模糊关系,在运行中通过不断检测e和ec,根据模糊控制原理来对3个参数进行在线修改,以满足不同e和ec时对控制参数的不同要求,而使被控对象有良好的动、静态性能。
从系统的稳定性、响应速度、超调量和稳态精度等各方面来考虑, Kp, Ki, Kd的作用如下:
(1)比例系数Kp的作用是加快系统的响应速度,提高系统的调节精度。 Kp越大,系统的响应速度越快,系统的调节精度越高,但易产生超调,甚至会导致系统不稳定。 Kp取值过小,则会降低调节精度,使响应速度缓慢,从而延长调节时间,使系统静态、动态特性变坏。
(2)积分作用系数 Ki的作用是消除系统的稳态误差。 Ki越大,系统的静态误差消除越快,但Ki过大,在响应过程的初期会产生积分饱和现象,从而引起响应过程的较大超调。若 Ki过小,将使系统静态误差难以消除,影响系统的调节精度。
(3)微分作用系数Kd的作用是改善系统的动态特性,其作用主要是在响应过程中抑制偏差向任何方向的变化,对偏差变化进行提前预报。但Kd过大,会使响应过程提前制动,从而延长调节时间,而且会降低系统的抗干扰性能。
以PI参数整定为例,必须考虑到在不同时刻两个参数的作用以及相互之间的互联关系。模糊自整定PI是在PI算法的基础上,通过计算当前系统误差e和误差变化率ec,利用模糊规则进行模糊推理,查询模糊矩阵表进行参数调整。
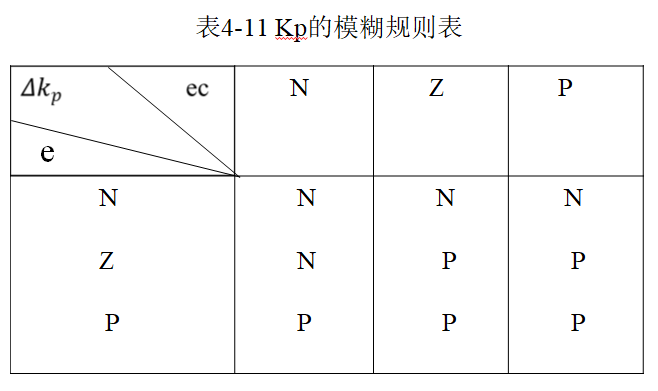
模糊控制设计的核心是总结工程设计人员的技术知识和实际操作经验,建立合适的模糊规则表,得到针对Kp, Ki两个参数分别整定的模糊控制表。
(1) Kp的模糊整定规则表(见表4-11)
(2)Ki的模糊整定规则表(见表4-12)

Kp,Ki的模糊控制规则表建立好后,可根据如下方法进行自适应校正。将系统误差e和误差变化率ec变化范围定义为模糊集上的论域。
![]()
其模糊子集为 e,ec={N,O,P},子集中元素分别代表负,零,正。设e、ec和两个系数均服从正态分布,因此可得出各模糊子集的隶属度,根据各模糊子集的隶属度赋值表和各参数模糊控制模型,应用模糊合成推理设计PI参数的模糊矩阵表,查出修正参数代入下式计算。

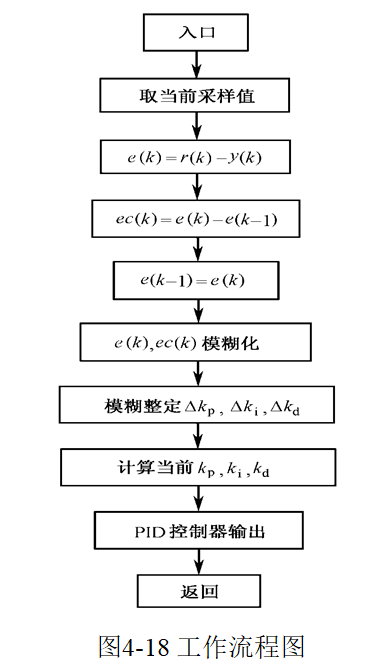
在线运行过程中,控制系统通过对模糊逻辑规则的结果处理、查表和运 算,完成对PID参数的在线自校正。其工作流程图如图4-18所示。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号