
@
IMU与VO的融合问题可以看作是对状态量的最小二乘估计,因此核心问题就转换为了VIO 残差函数的构建。


一、系统需要优化的状态量

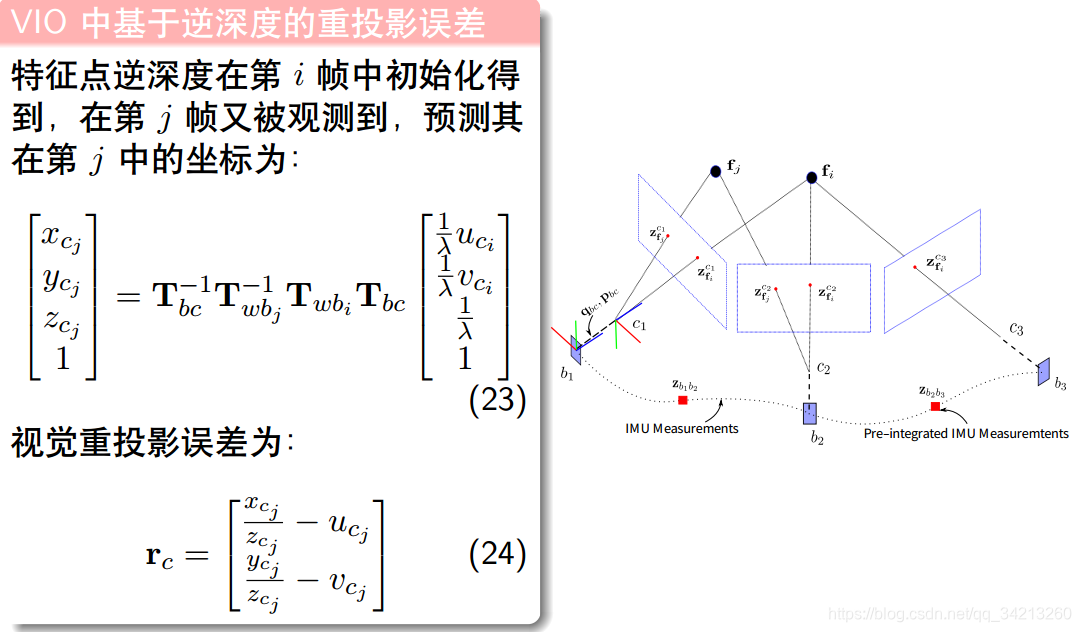
二、视觉重投影误差

三、预积分模型
3.1 IMU 测量值的积分问题


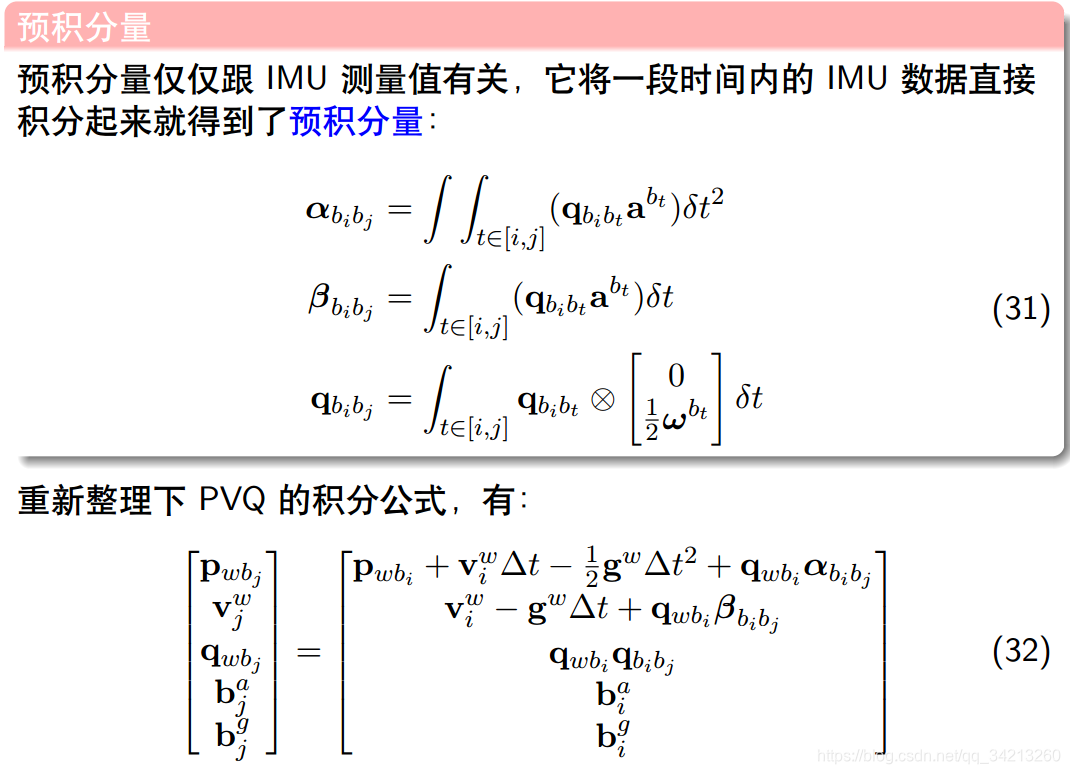
3.2 IMU预积分模型的提出
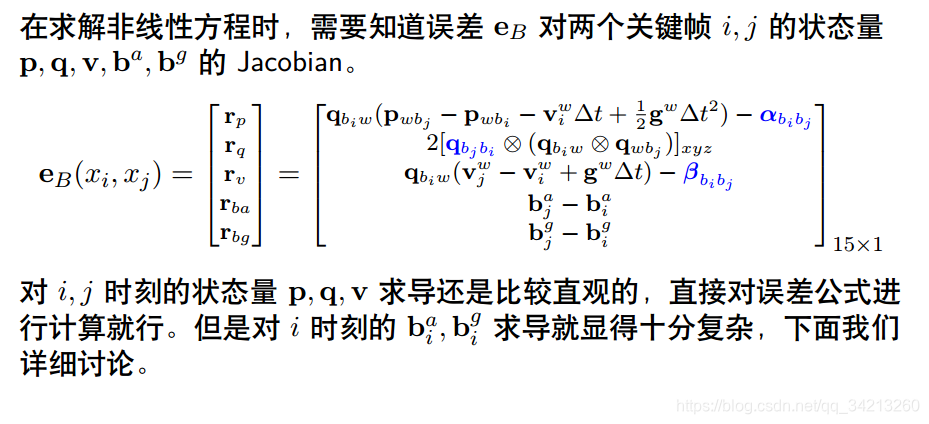
3.3 IMU 的预积分误差
 第二项可以由第一章公式(7)得到
第二项可以由第一章公式(7)得到
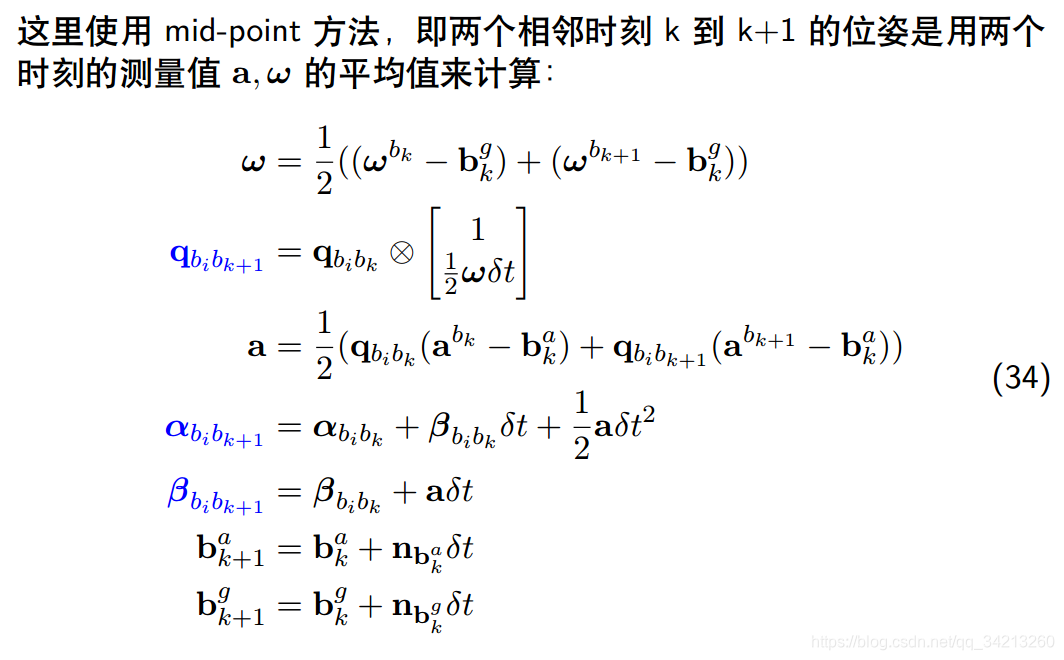
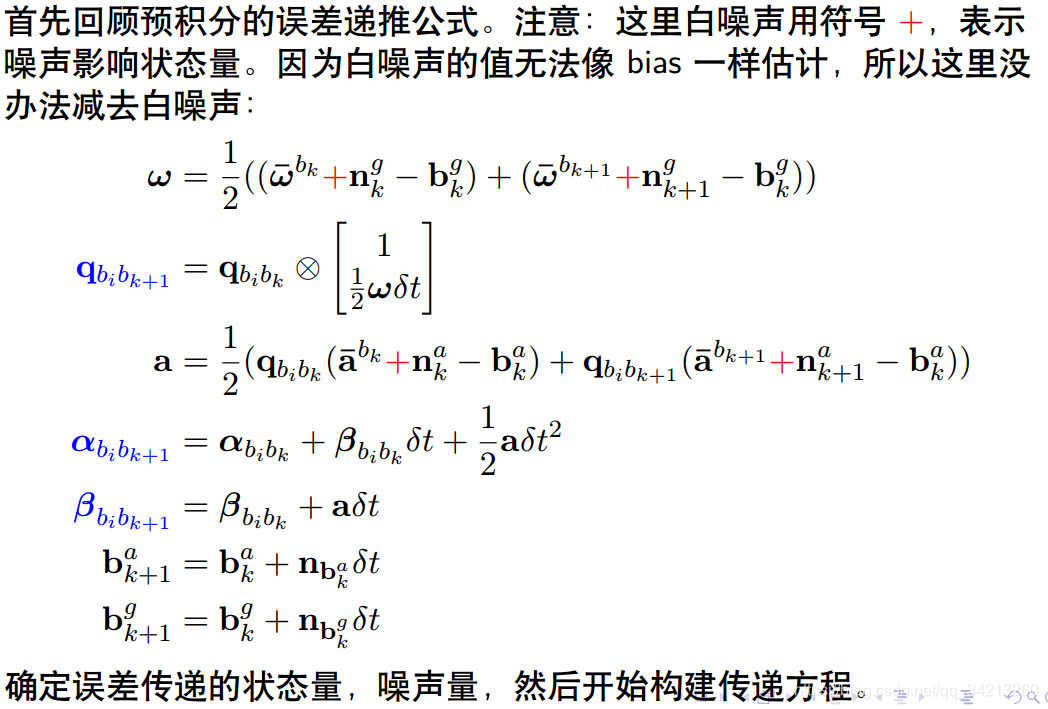
3.4 预积分的离散形式
3.5 预积分量的方差


四、状态误差线性递推公式的推导
4.1 简介
4.2 基于一阶泰勒展开的误差递推方程

4.3 基于误差随时间变化的递推方程

 自己拿笔推导一下可以得到:
自己拿笔推导一下可以得到:
\(R[\delta \theta]_{×}\left(a^{b}+\delta a^{b}\right) \approx R[\delta \theta]_{×} a^{b}=R\left[a^{b}\right]_{×} \delta \theta\)
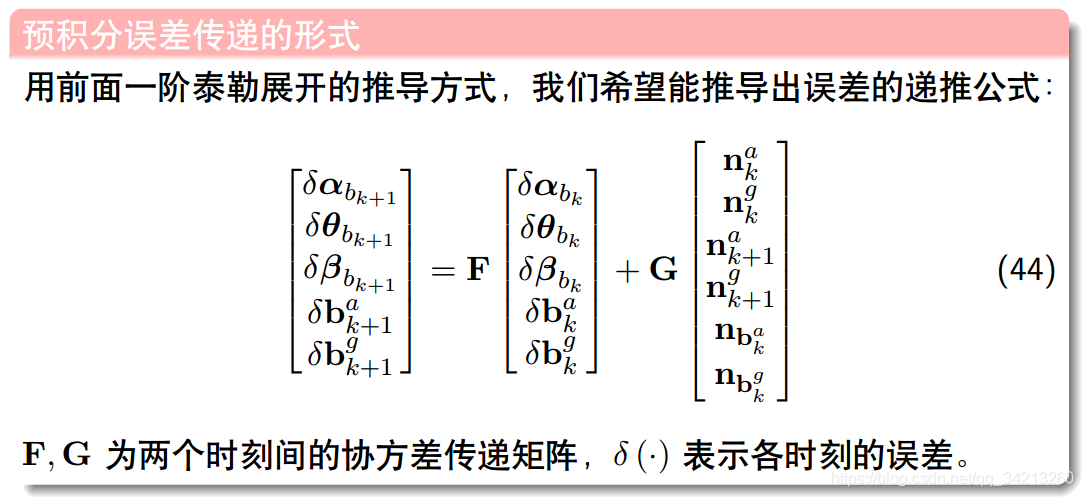
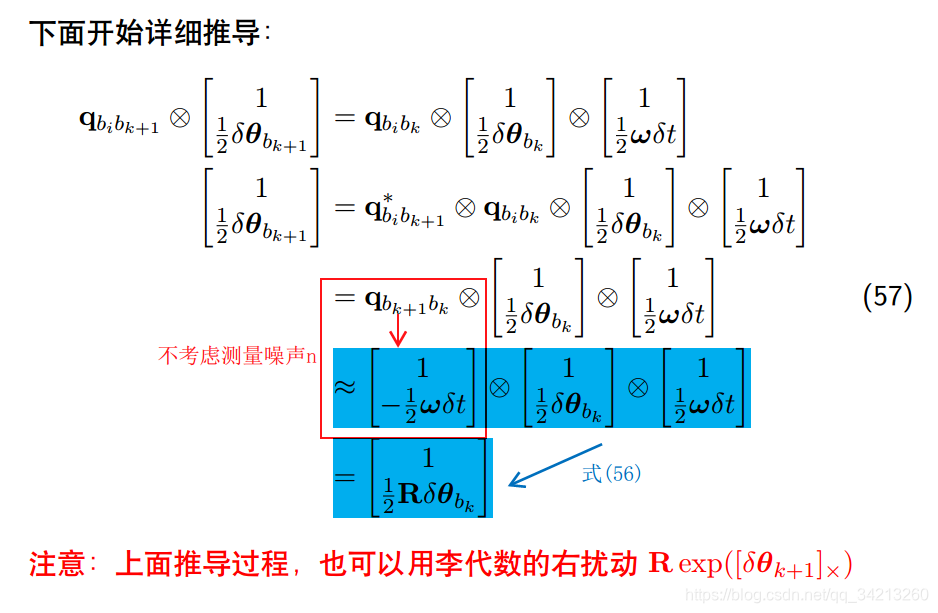
4.3 预积分的误差递推公式推导
 这两个矩阵的推导从下往上推导会更简单一些
这两个矩阵的推导从下往上推导会更简单一些
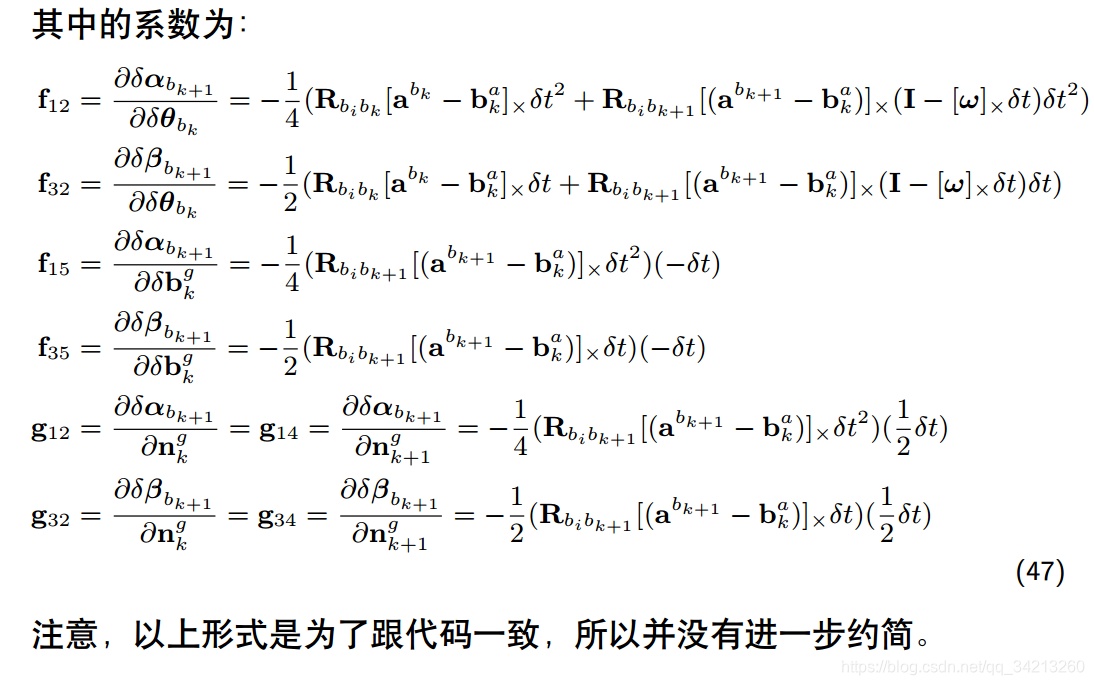

4.4 雅克比矩阵 F 的推导
F第五行推导:
\(\left\{\begin{array}{c}b_{k+1}^{g}=b_{k}^{y}+n_{b_{k}^{g}} \delta_{t} \\ \hat{b}_{k+1}+\delta b_{k+1}^{g}=\hat{b}_{k}^g+\delta b_{k}^{y}+n_{b_k^{g}} \delta t\end{array}\right.\)
\(\Rightarrow \quad \delta b_{k+1}^{g}=\delta b_{k}^{g}+n_{b_k^{g}} \delta t\)
所以可得:
\(F_{51}=0\); \(F_{52}=0\); \(F_{53}=0\); \(F_{54}=0\);\(F_{55}=I\)
同理,可得F第四行的推导:
\(F_{41}=0\); \(F_{42}=0\); \(F_{43}=0\); \(F_{44}=I\);\(F_{45}=0\)

 以下推导需要知道如下公式:
以下推导需要知道如下公式:
- 当\(\theta\)很小时,有 \(\exp( [\boldsymbol{\theta}]_{\times})=I+ [\boldsymbol{\theta}]_{\times}\)
- \([a]_{\times}b=-[b]_{\times}a\)

第3到4行的推导需要知道如下公式:
\([\exp([\theta]_{\times})a]_{\times}=\exp([\theta]_{\times})[a]_{\times}\exp([-\theta]_{\times})\)

\(f_{34}\):对\(b^a_k\)预积分量的误差:
同上,从公式(48)易知,该Jacobian也只跟加速度有关
\(a\delta t=\frac{1}{2}\left(\mathbf{q}_{b_{i} b_{k}}\left(\mathbf{a}^{b_{k}}-\mathbf{b}_{k}^{a}\right)+\mathbf{q}_{b_{i} b_{k+1}}\left(\mathbf{a}^{b_{k+1}}-\mathbf{b}_{k}^{a}\right)\right) \delta t\)
所以Jacobian \(f_{34}=-\frac{1}{2}\left(\mathbf{q}_{b_{i} b_{k}}+\mathbf{q}_{b_{i} b_{k+1}}\right) \delta t\)
 公式\(f_{35}\)有两种推导方式:
公式\(f_{35}\)有两种推导方式:
- 第一种:(第一种更容易理解)

- 第二种


 \([\mathbf{q}]_{L}[\mathbf{q}]_{R}\)这里的下标L和R表示把四元数变成对应的四元数左乘右乘的矩阵。这个式子就是四元数的旋转写成了让人看不懂的形式……(lll¬ω¬)
\([\mathbf{q}]_{L}[\mathbf{q}]_{R}\)这里的下标L和R表示把四元数变成对应的四元数左乘右乘的矩阵。这个式子就是四元数的旋转写成了让人看不懂的形式……(lll¬ω¬)

 其他部分的推导过程类似
其他部分的推导过程类似
五、残差 Jacobian 的推导
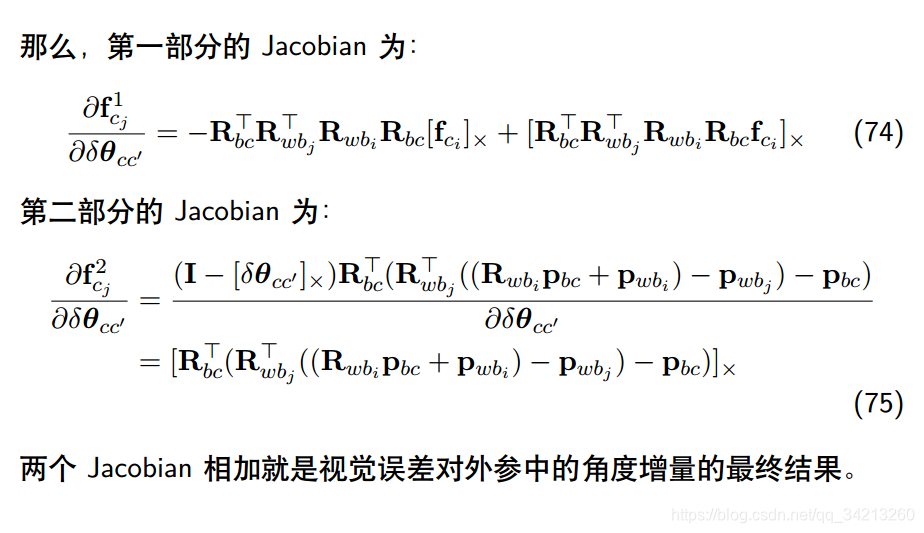
5.1 视觉重投影残差的 Jacobian
 上式中的 \(p\) 代表位移(也就是变换矩阵中的平移部分 t )
上式中的 \(p\) 代表位移(也就是变换矩阵中的平移部分 t )
\(f_c=f^w_c=f_{cw}=oc -ow\)
\(p_{bc}=t_{bc}\)因为公式(60)把平移部分和旋转部分分开来写了,所以第一个变换矩阵的旋转不影响后续的平移


 公式(67)是右扰动模型
公式(67)是右扰动模型
\(\frac{\partial \mathbf{f}_{\mathbf{c}_{j}}}{\partial \delta \boldsymbol{\theta}_{b_{i} b_{i}^{\prime}}}=\frac{\partial \mathbf{R}_{b c}^{\top} \mathbf{R}_{w b_{j}}^{\top} \mathbf{R}_{w b_{i}}\exp(\left[\delta \boldsymbol{\theta}_{b_{i} b_{i}^{\prime}}\right]_{\times}) \mathbf{f}_{i_{i}}}{\partial \delta \boldsymbol{\theta}_{b_{i} b_{i}^{\prime}}}=…\)


公式(71)\(f_{cj}\)的平移部分 = \(\mathbf{R}_{b c}^{\top}\left(\mathbf{R}_{w b_{j}}^{\top}\left(\left(\mathbf{R}_{w b_{i}} \mathbf{p}_{b c}+\mathbf{p}_{w b_{i}}\right)-\mathbf{p}_{w b_{j}}\right)-\mathbf{p}_{b c}\right)=\)

5.2 IMU 误差相对于优化变量的 Jacobian








 浙公网安备 33010602011771号
浙公网安备 33010602011771号