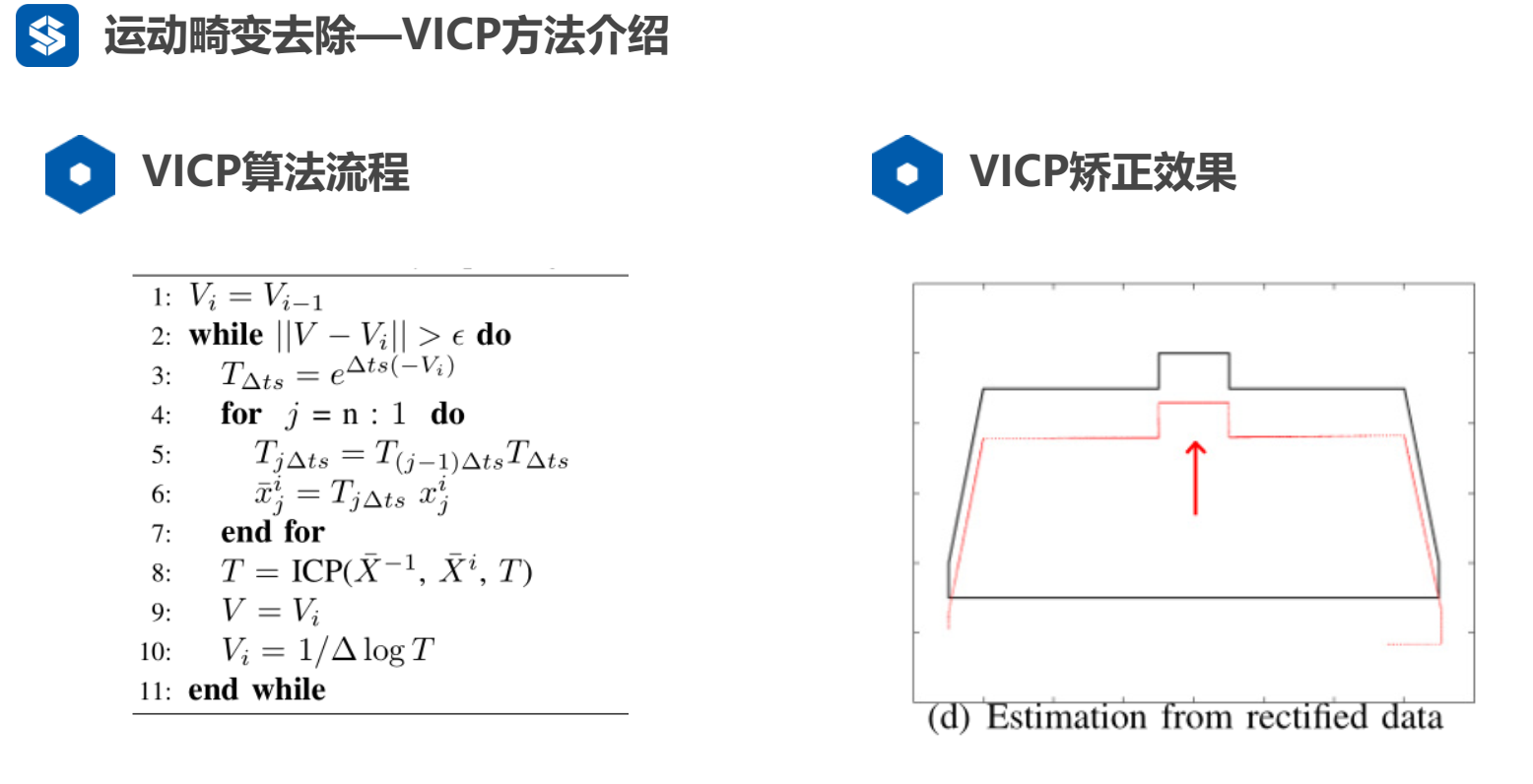
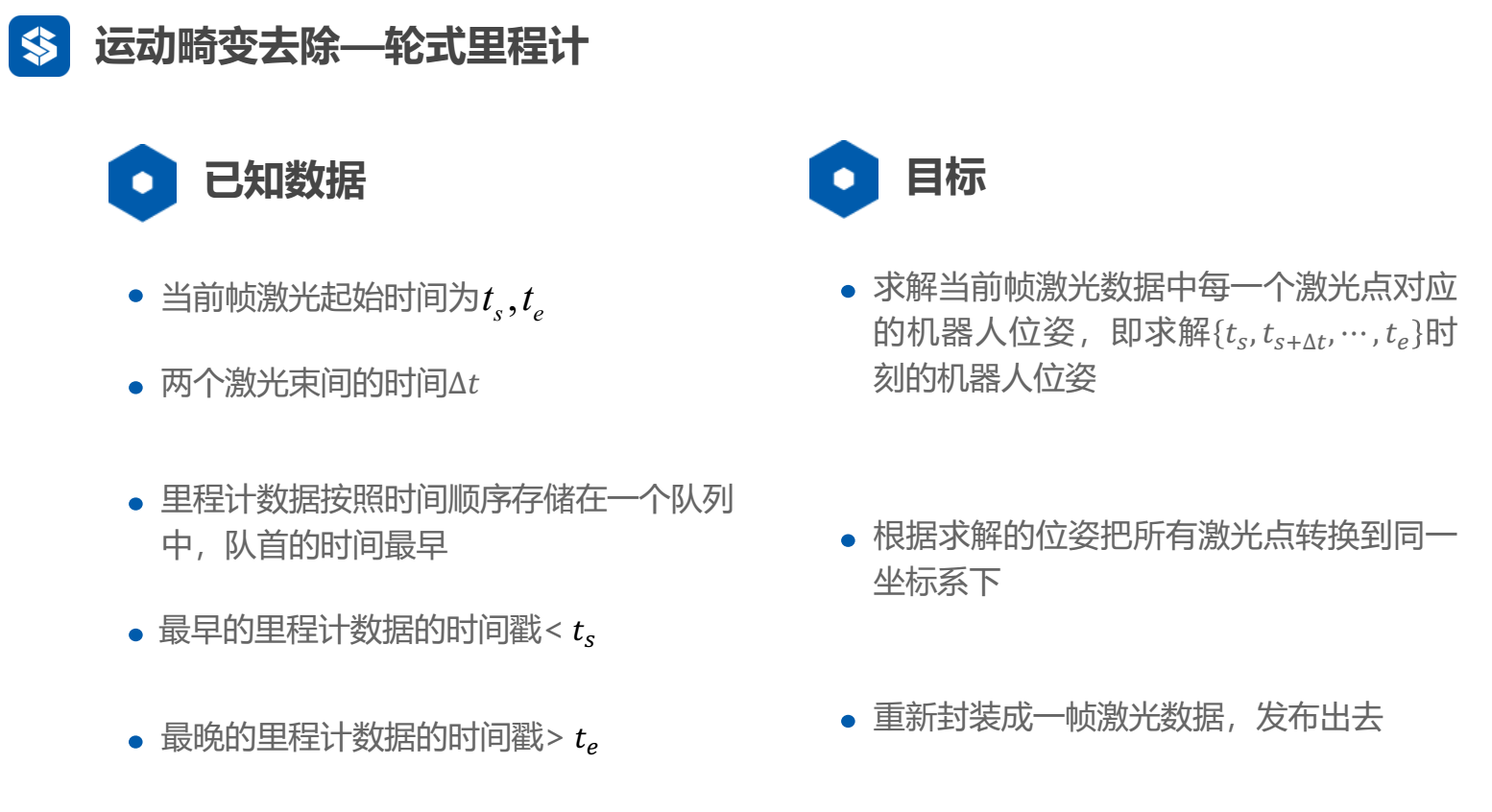
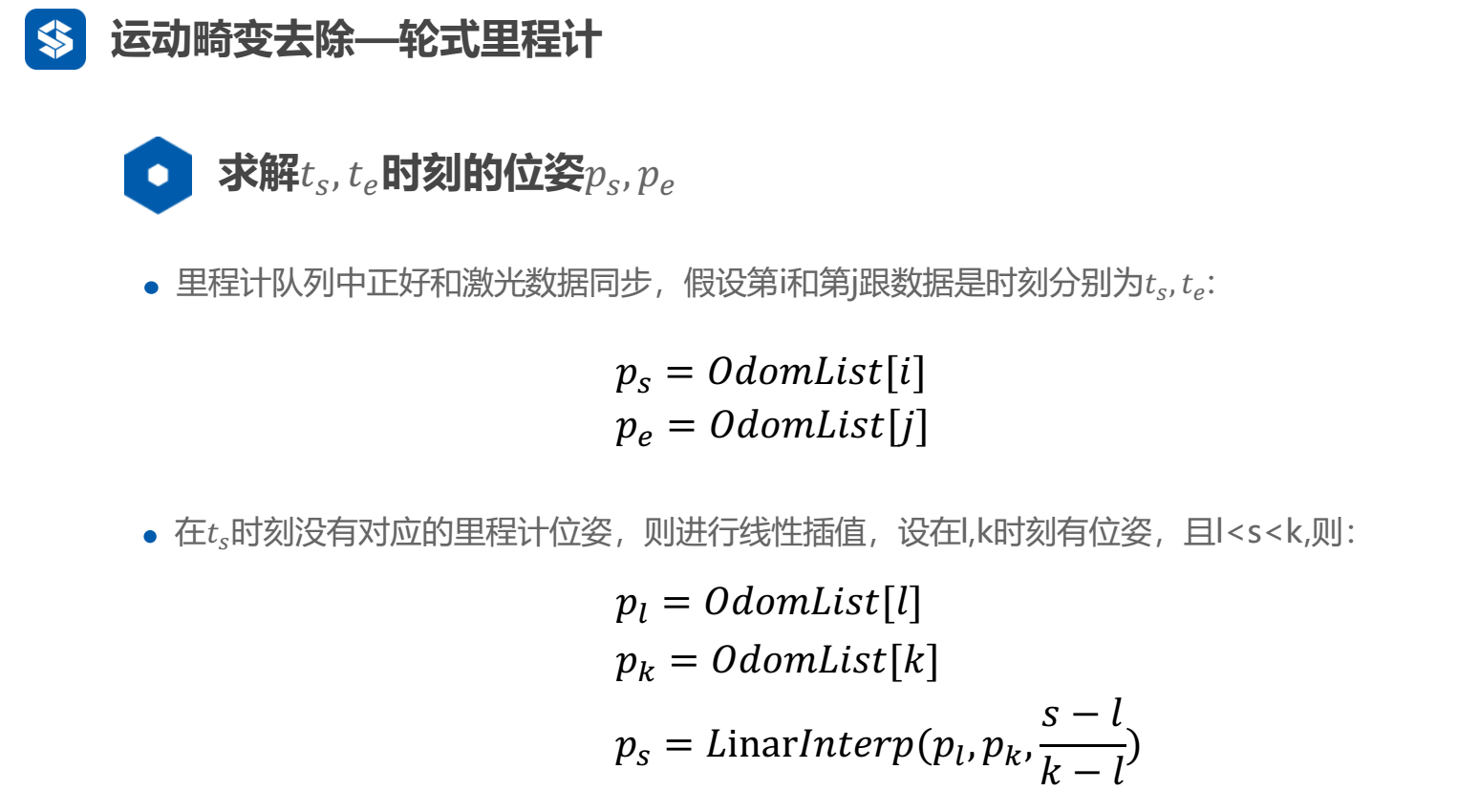
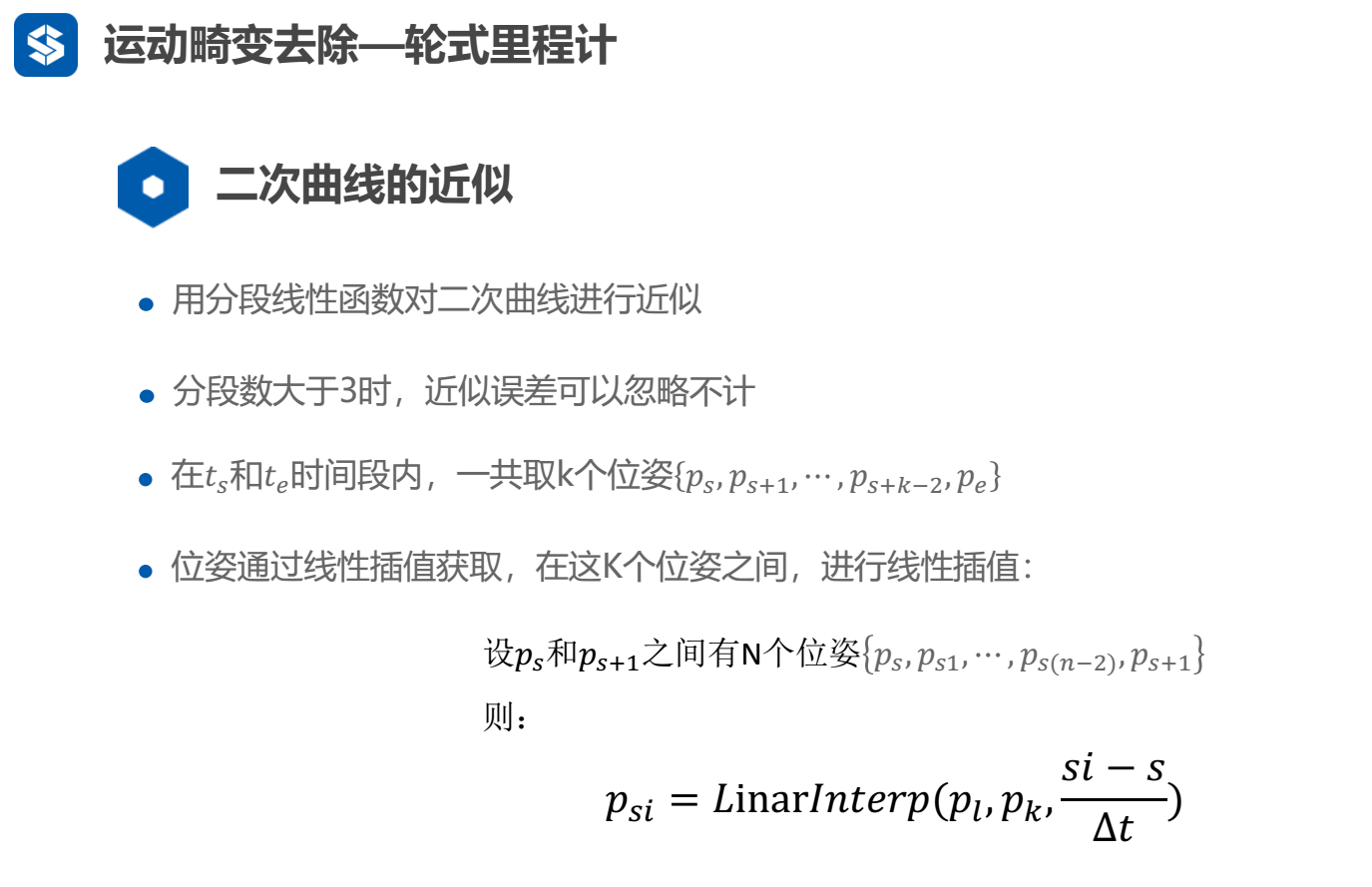
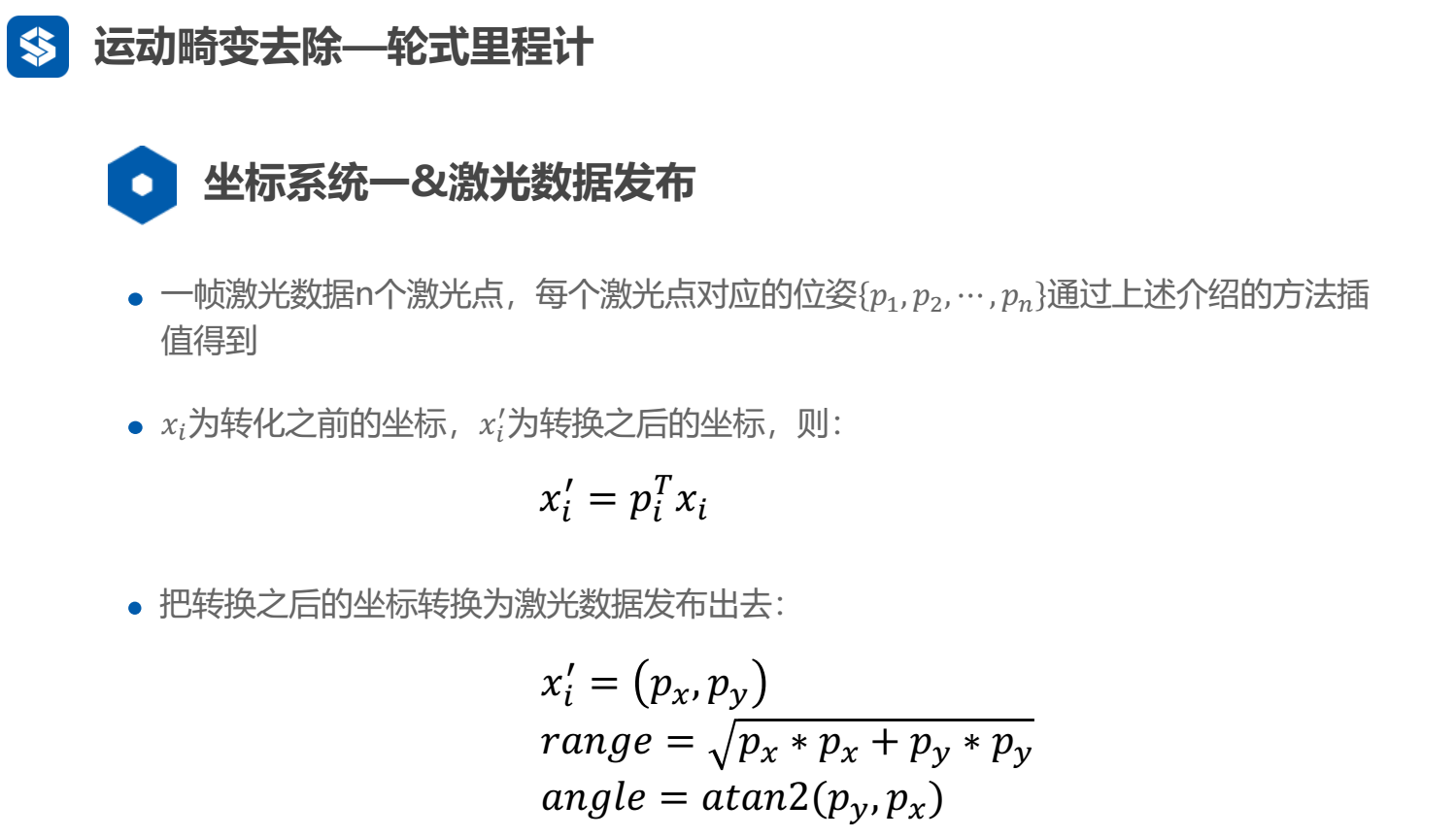
ch3 传感器数据处理II: 激光雷达运动畸变去除 . 参考资料[1] VICP:Velocity updating Iterative Closest Point Algorithm.[2] LOAM:Lidar Odometry and Mapping in real-time














 浙公网安备 33010602011771号
浙公网安备 33010602011771号