
重生之我是操作系统(九)----文件管理(下)
磁盘基本划分
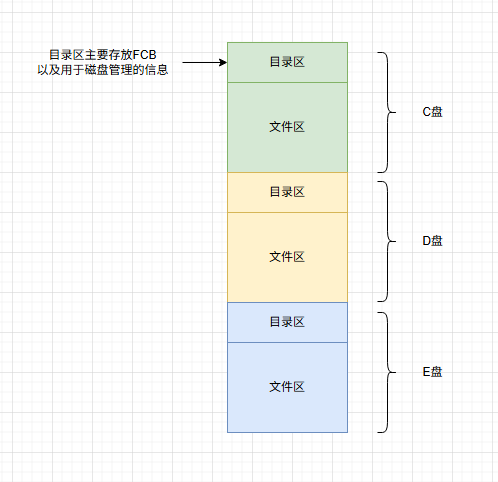
目录区包含文件目录,空闲表,位示图,超级块等用于文件管理的信息
空闲存储空间管理
操作系统需要跟踪磁盘上的可用空间,确保高效分配和回收操作系统需要跟踪磁盘上的可用空间,确保高效分配和回收。常用方法如下:
-
空闲表法
与内存分配的动态分配算法如出一辙,因此不再赘述。
反正来来去去就是首次适应,最佳适应等策略,回收时注意合并压缩。 -
空闲链表法
原理:将所有空闲块通过指针或索引链接成一个链表,记录起始块和块数。
优点:实现简单,适合动态分配。
缺点:链表操作(遍历、拆分、合并)效率低,不适合大规模存储。
链表结构为0=>4=5=>6=>7=>......=>12=>14=>17=>......
-
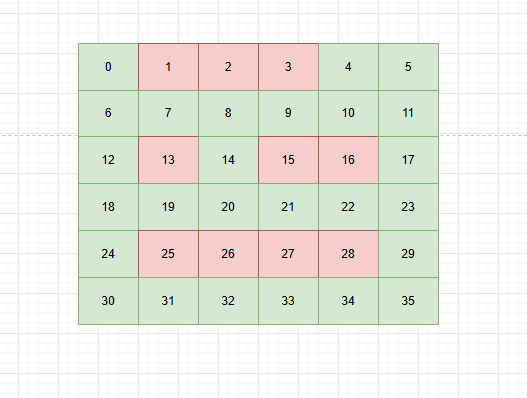
位图法(Bit Map)
原理:用一个二进制位(Bit)对应磁盘上的一个物理块,0表示空闲,1表示已占用。
优点:空间占用小,查询和分配速度块(位运算),适合大容量,比如ext4文件系统。
缺点:分配连续空间时需扫描多个位,可能效率较低。
![image]()
-
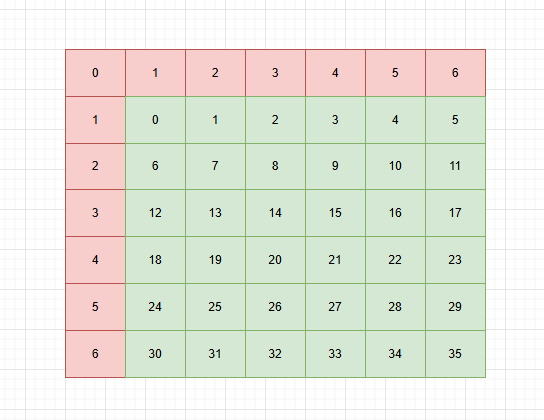
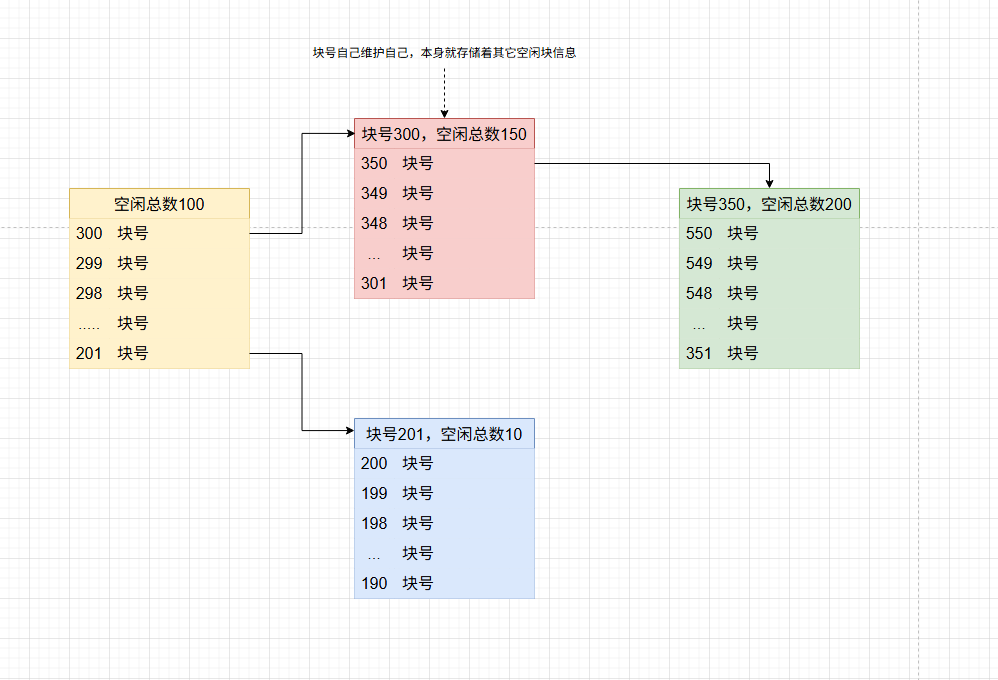
成组链接法
原理:将空闲块分组,每组记录下一组的快号,最后一组指向NULL或-1。
优点:结合位图和链表的优势,兼顾空间效率和分配速度,常用于高效文件系统。
缺点:实现复杂。
空闲法,空闲链表,位视图法,成组链接法本质上是数据结构的翻来覆去。数组=>链表=>位图=>混合使用。
注意一点,这一节讲的是操作系统如何跟踪磁盘可用空间(空闲管理),上一节的物理结构分配是操作系统如何占用物理空间(分配策略)。两者不要搞混了。
典型文件系统实现
- Linux ext4
采用成组链接法管理空闲块,inode 索引分配(支持三级索引),位图记录块状态。 - Windows NTFS
使用 B + 树管理元数据,主文件表(MFT)记录文件属性和索引,空闲空间通过位图和链表结合管理。 - FAT32
显式链接分配,通过 FAT 表记录块链接,适合简单存储设备(如 U 盘)。
文件的基本操作
- 创建文件(created系统调用)
- 删除文件(delete系统调用)
在windows系统中,我们删除某个文件。会提示“暂时无法删除文件”。就是因为计数器还未归零 - 读文件(read系统调用)
根据读指针,读入数据量,内存位置,讲文件从外存写入内存 - 写文件(write系统调用)
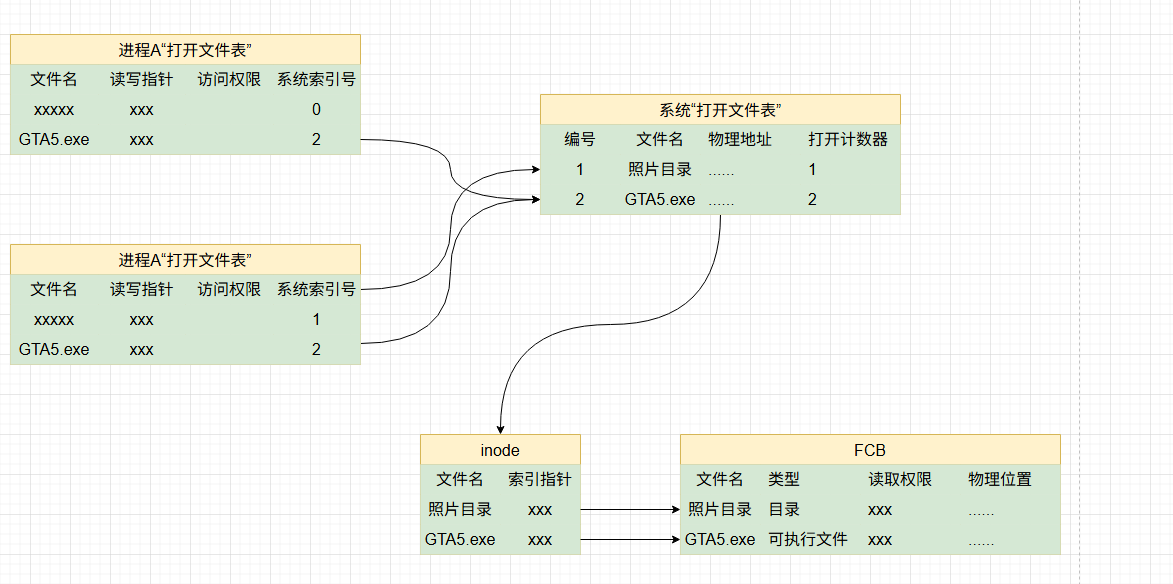
根据写指针,写入数据量,内存位置,讲文件从内存写入外存 - 打开文件(open系统调用)
将FCB信息负责到系统的打开文件表中,再复制给需要打开的进程。
进程的打开文件表特有的属性:读写指针,访问权限。
系统的打开文件表特有的属性:打开计数器 - 关闭文件(close系统调用)
将进程的打开文件表中删除相应的表项
回收分配给该文件的内存空间
系统打开文件表,计数器-1。若count为0,则删除相应表项。
系统索引号,也被称为文件描述符(fd)
番外:磁盘
磁盘是计算机中常用的块存储设备,通过磁性介质持久化存储数据。
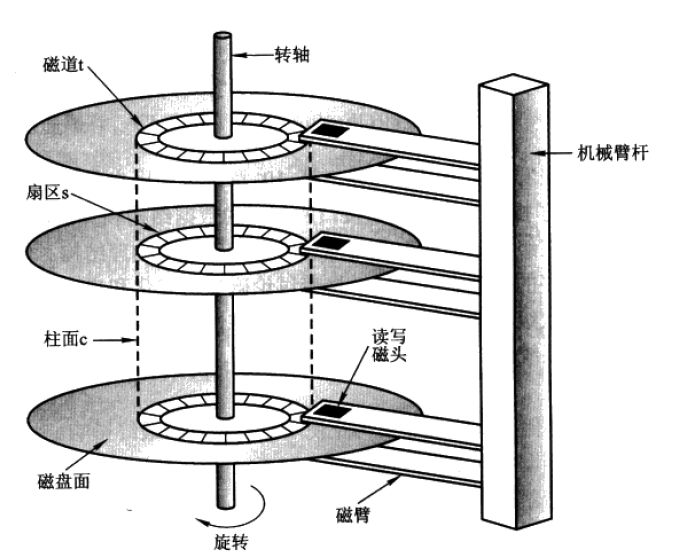
物理组成
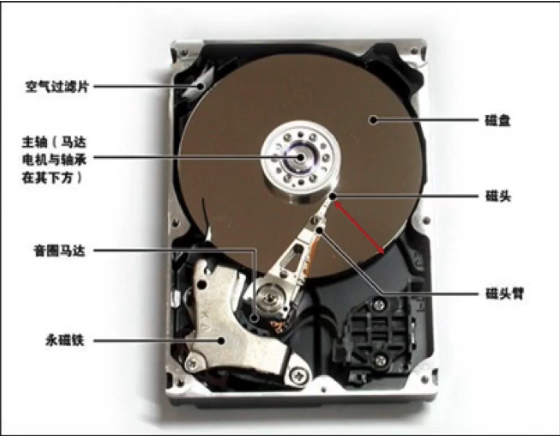
- 盘片(Platter)
圆形薄片,表面涂有磁性材料,一般由多个盘片堆叠组成(如 2~5 片),每个盘片有上、下两个盘面(Side)。 - 读写头(Head)
每个盘面对应一个读写头,悬浮在盘片上方(不接触盘面),通过磁性感应读取数据或改变磁性写入数据。 - 主轴/转轴(Spindle)
盘片围绕主轴高速旋转(转速如 5400 转 / 分钟、7200 转 / 分钟)。 - 磁盘臂/机械臂杆(Arm)
带动读写头在盘片表面径向移动,定位目标磁道。
![image]()
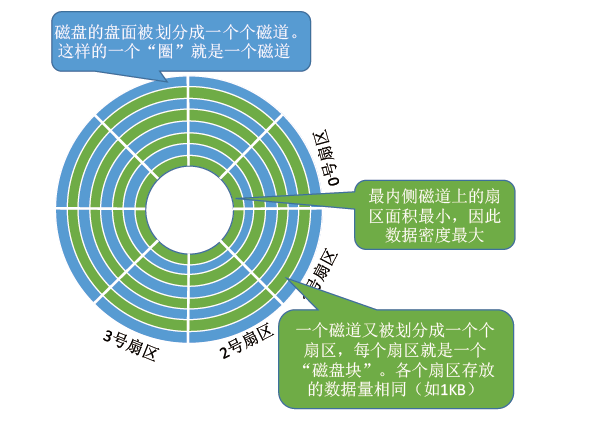
磁道,扇区
每个盘片被划分为一个个的磁道,每个磁道又划分为一个个扇区。
盘面,柱面
磁盘是由多个盘片叠起来,所有盘面中的垂直位置就叫柱面
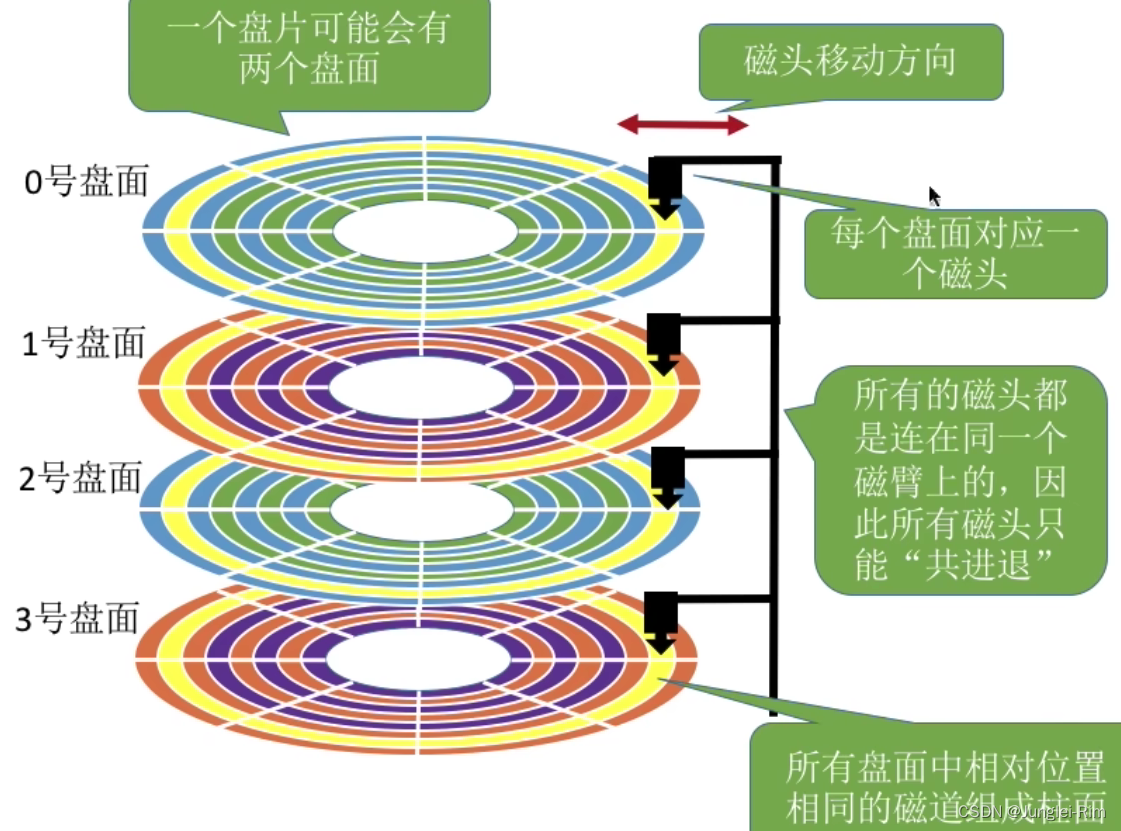
因此磁盘的物理地址,可以由柱面号=>盘面号=>扇区号组成。
- 根据"柱面号"移动磁臂,让磁头指向指定柱面
- 激活指定盘面对应的磁头
- 磁盘在旋转过中,指定的扇区会从磁头下面划过,这样就完成了对指定扇区的读写。
磁盘调度
一次磁盘读写操作需要的时间如下:
- 寻道时间
启动磁臂(2ms)+移动磁头(0.2ms*n)。 - 延迟时间
通过旋转磁盘,使磁头定位到目标扇区所需要的时间。也就是转动磁盘所消耗的时间。 - 传输时间
从磁盘读/写数据所经历的时间。
从上面可以看出,延迟时间与传输时间。受限于物理限制,是没办法在软件层面上优化的。
只有寻道时间,移动磁头的过程。我们可以通过不同的调度算法,缩短磁头移动的路径。
寻道时间占主导(约 60%~80%)。当多个 I/O 请求同时等待处理时,通过合理安排请求顺序,可显著减少平均寻道时间,提升磁盘整体性能。
- 先来先服务(First-Come, First-Served, FCFS)
与软件层面的FCFS算法不同,比如内存是支持随机访问的,因此时间复杂度为O(1)。但硬件层面的FCFS需要考虑移动磁头的时间。
原理:按照请求顺序,不考虑当前磁头位置
优点:公平性好,实现简单
缺点:磁头来回移动,平均寻址时间长,效率低
磁头当前位置:100
请求序列:98, 183, 37, 122, 14, 124, 65, 67
寻道顺序:100→98→183→37→122→14→124→65→67
总寻道距离:|100-98| + |98-183| + … + |65-67| = 2 + 85 + 146 + 85 + 108 + 110 + 59 + 2 = 597
- 最短寻道时间优先(Shortest Seek Time First, SSTF)
原理:选择离当前磁头位置最近未处理,优先处理。
优点:减少平均寻道时间
缺点:可能会导致饥饿,远方的扇区可能一直得不到调度。
初始位置 100,最近请求是 98 或 122(距离 2 或 22),选择 98;
处理后磁头在 98,最近请求是 67 或 65(距离 31 或 33),但实际更优为 122(距离 24)?需注意:SSTF 是找当前磁头位置的最近,而非已处理后的最近。
正确顺序:100→98(距离 2)→122(距离 24)→124(距离 2)→183(距离 59)→67(距离 116)→65(距离 2)→37(距离 28)→14(距离 23)
总寻道距离:2+24+2+59+116+2+28+23 = 256(比 FCFS 减少 56%)
- 扫描算法(SCAN,电梯算法)
原理:磁头在一个方向上移动的时候,沿途处理所有路径的请求。到达一端后反向移动。处理另一个方向的请求。
类似电梯运行,一上一下,每一层都都会经过,有停靠请求就停,否则只经过。
优点:减少来回移动,公平性优于SSTF。
缺点:边缘的请求延迟较大,因为要等磁头移动过来。
(假设磁头当前在 100,方向 “向外”,最大磁道 200,请求序列同上):
向外方向请求:122, 124, 183
处理顺序:100→122→124→183(到达外边缘 200 前),然后反向向内;
向内方向请求:98, 67, 65, 37, 14
总寻道距离:(122-100)+(124-122)+(183-124)+(183-98)+(98-67)+(67-65)+(65-37)+(37-14) = 22+2+59+85+31+2+28+23 = 252
- 循环扫描算法(Circular SCAN, CSCAN)
原理:与Scan类似,但磁头到达边缘后。直接跳回0磁道。不处理返回途中的请求,如同跳楼,先坐电梯升到顶楼,然后跳下来。
优点:适合均匀分布访问的场景,避免Scan在反向时"空扫描"
缺点:平均寻道时间高于SCAN,但公平性更好
示例(同上场景,假设高端 200,低端 0,方向向外):
向外处理:122→124→183→200(假设到达高端),然后跳回 0,处理向内方向未完成的请求(98, 67, 65, 37, 14)。
总寻道距离需计算跳回开销,但实际中跳回时间不计入寻道(因不访问数据),主要处理单向请求。
优点:适合需要均匀分布访问的场景(如磁盘阵列),避免 SCAN 在反向时的 “空扫”。
缺点:平均寻道时间略高于 SCAN,但公平性更好。
- Look算法
原理:在SCAN/CSCAN算法中,只有到达边缘的磁道时,才改变磁头移动方向。如果磁头运行到一半时,发现后面已经没有请求了,这就造成了浪费。因此,Look算法的核心是边移动边观察,如果在移动方向上没有请求,就立即改变磁头方向。
磁盘初始化
磁盘初始化分配为三个步骤:
- 低级格式化
将磁盘的各个磁道划分为扇区,一个扇区通常分为头,数据区域,尾。三个部分。各个扇区头尾衔接形成链表。
管理扇区的所需要的各种数据结构一般放在头中,尾一般存放下一个扇区的地址。 - 磁盘分区
每个分区由若干个柱面组成,就是我们熟悉的C盘,D盘,E盘。 - 逻辑格式化
创建文件系统,包括根目录,位示图,空闲分区表等。
初始化完成后,由BIOS装入初始化程序,找到硬盘中的MBR引导块。
磁盘坏块的处理
- 软件层面
可以在逻辑格式化时,对磁盘进行坏块检查。标明哪些扇区是坏扇区。并告诉操作系统(FAT表)。逻辑上对它屏蔽。 - 硬件层面
由磁盘内部控制器,维护一个坏块链条,在低级格式化时,就标记出坏块,并屏蔽。
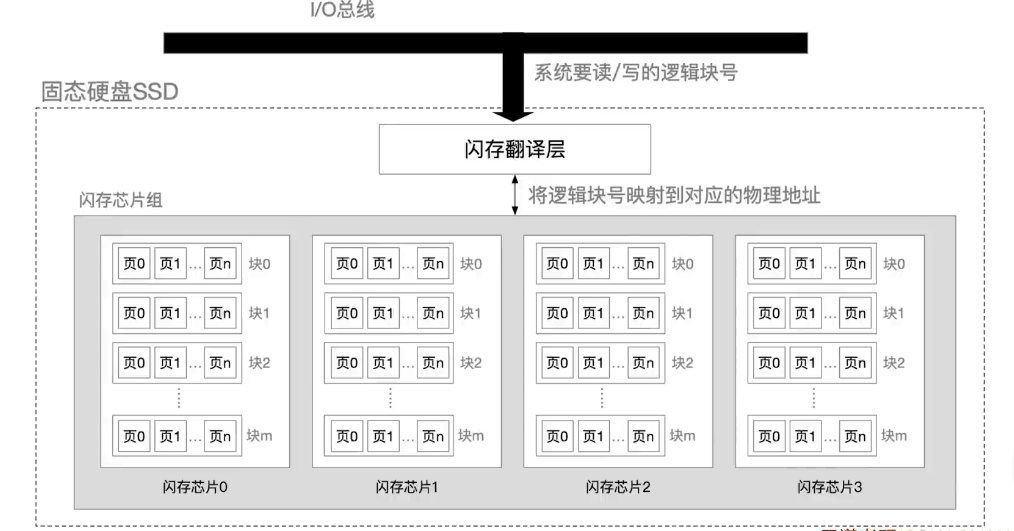
固态硬盘
机械硬盘受限于物理限制,已经发展到了极限。尤其在随机读取方面,更是到达了瓶颈。
固态硬盘(Solid State Drive, SSD)是基于闪存芯片的存储设备,彻底摒弃了传统机械硬盘(HDD)的旋转盘片和磁头寻道结构,通过电信号直接读写数据,实现了存储性能的质的飞跃。
页(Page):最小读写单位(4KB~16KB),等同于磁盘扇区
块(Block):最小擦除单位(64~256 页),等同于磁盘磁道。
| 特性 | SSD | HDD |
|---|---|---|
| 速度 | 顺序读写7GB/s+,随机读写1000K IOPS+ | 顺序读写200MB/s,随机读写100 IOPS |
| 抗震性 | 无机械部件,抗冲击 | 易受震动损坏 |
| 功耗 | 低(<5W) | 高(10~20W) |
| 容量成本 | 高(约0.1元/GB) | 低(约0.03元/GB) |
| 适用场景 | 系统盘、高频读写、移动设备 | 大容量冷存储、监控录像 |

 浙公网安备 33010602011771号
浙公网安备 33010602011771号