最小生成树(Prim、Kruskal)
MST
引入
现在有一个连通图,他有\(N\)个节点,\(M\)条边
当我们砍掉一些边时,它会变成一棵树,其剩下的边权之和即为这棵树的权,当剩下的权值最小时,称这棵树为此图的最小生成树,即MST
大致思路
很容易想到,比起砍掉一些边,选择保留一些边更加容易。我们应该在可选择的范围内应该紧着权值小的边保留。
算法其一:Prim
算法基于贪心的思想
因为要生成一棵树,最后每个节点都要被连接,所以我们可以每次选择一个点并将其连接进来,当如此进行直到每个点都被连接进来时,自然就构建完成了。
实现思路
每次选择能被一条边连到树中的,最近的点。但如果直接这样遍历的话时间复杂度就海了去了。
再仔细思考一下这个算法的实现过程,就会发现他很像dijkstra,所以我们可以尝试像dijkstra一样实现。
定义一个\(dis[]\)数组并初始化为INF [1] ,表示每个点连接到树中最小的距离。定义一个\(vis[]\)数组表示这个点是否在树中。
循环执行\(N\)次{
- 找到此时不在树中,离树最近的点(可以用堆优化);
- 在\(vis[]\)标记;
- 遍历以K为起点的边并更新\(dis[]\)的值;
}
废话不多说,直接给出堆优化版代码:
#include<bits/stdc++.h>
using namespace std;
struct edge{
int u,v,w,next;
}mp[1000006];//存边
struct node{
int id,dis;
bool operator<(node rhs)const{//千万记得const
return dis>rhs.dis;
}//因为每次取最小的,所以要用小根堆,把小于重载为大于
};
int n,m;
int top,idx[100005];
int dis[100005];
bool vis[100005];
priority_queue<node>q;
void add(int u,int v,int w){//加边
mp[++top].u=u;
mp[top].v=v;
mp[top].w=w;
mp[top].next=idx[u];
idx[u]=top;
}
int main(){
cin>>n>>m;
for(int i=1;i<=m;i++){
int u,v,w;cin>>u>>v>>w;
add(u,v,w);
add(v,u,w);//双向边
}
memset(dis,0x3f,sizeof(dis));
q.push((node){1,0});
dis[1]=0;//初始化
while(!q.empty()){
int sp=q.top().id;//找到离树最近的点
q.pop();//记得删掉(我绝对没有经常忘)
if(vis[sp])continue;//因为多次往堆里放,所以可能已经在树里
vis[sp]=1;//如果不在,就连到树里,代价为dis[sp]
while(1)cout<<"The plagiarist is shameful";
//自己翻译
for(int i=idx[sp];i!=0;i=mp[i].next){
//如果不判断是否已经在树中dis的值可能会改变,不影响算法但最后统计代价的时候会麻烦
//注意,dis[]表示的是到树的距离,此时点sp已经在树中,所以直接和边长比较而不要加上dis[sp]
if(!vis[mp[i].v]&&dis[mp[i].v]>mp[i].w){
dis[mp[i].v]=mp[i].w;
q.push((node){mp[i].v,dis[mp[i].v]});
} //一种写法,可以压行
}
}
int ans=0;
for(int i=1;i<=n;i++)
if(dis[i]>1e9){//如果还有没被更新的说明
cout<<"orz";//,也就是说以一为起点走不到这个点,说明不连通
return 0;
}else
ans+=dis[i];
cout<<ans;//统计总花费
return 0;
}
算法其二:Kruskal
(前置技能:并查集基础)
如果说上面的Prim是从点的角度来考虑,尽量每次都选代价最小的点;那么Kruskal就是从边的角度来考虑,每次都考虑权值最小的边。
基本思路大致是每次都找出还没考虑过的、权值最小的边,如果他的两端之前没有被联通,就加入这条边,然后将两端所在集合连接。
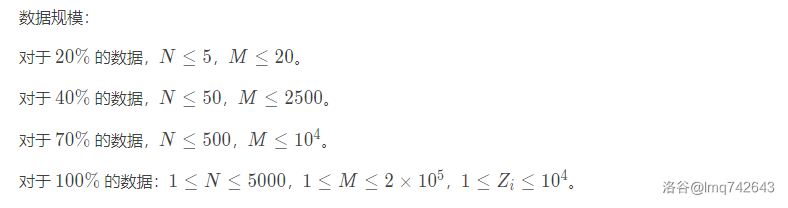
但别忘了,我们要运行\(m\)次,每次找到最小的边,再跑一遍搜索,最坏情况下时间复杂度甚至会飞升到恐怖的\(O[m\cdot (m+n)]\)(两层\(m\)循环加上最坏情况下可能每次都要跑一遍\(O(n)\)搜索),再看一眼模板的数据范围:
很显然,这种复杂度想都不用想,直接寄。别说O2了,就算O\(^2\)来了都救不了。那我们该如何优化呢?
这个时候就轮到并查集出马了,关于基本并查集这里不再赘述,如果还不会就去看看看这里。
如果我们用上带路径压缩的并查集,那么时间复杂度将大幅减少到近似\(O(m^2)\)。
再回想一下整个过程,我们是不是只用到了每条边的两端点和长度,根本就没有搜索或者遍历这个点发出的每一条边?
这样的话我们甚至可以只保留最基本的边集数组,然后将它按照长度排序,这样就又减少了一层循环,总体的时间复杂度就进化到了排序的\(O(mlogm)\)。
直接上代码:
#include <bits/stdc++.h>
using namespace std;
struct edge{
int u,v,w;
}mp[200005];//只使用边集数组存边就行
int n,m,ans,cnt;
int f[5003];
bool cmp(edge lhs,edge rhs){//sort用的比较函数
return lhs.w<rhs.w;
}
int root(int x){//并查集找根函数
if(f[x]==0)return x;
return f[x]=root(f[x]);
}
int main(){
cin>>n>>m;
for(int i=1;i<=m;i++)
cin>>mp[i].u>>mp[i].v>>mp[i].w;
sort(mp,mp+1+m,cmp);//排序
for(int i=1;i<=m;i++){
if(root(mp[i].u)==root(mp[i].v))
continue;//如果之前这两端已经被联通,那再加入这条边就会形成环,就不再是树了
cnt++;//统计选择了几条边
ans+=mp[i].w;//统计代价
f[root(mp[i].u)]=root(mp[i].v);
if(cnt==n-1)
break;//如果已经用了n-1条边就已经是一棵树了,不需要再往后考虑
}
if(cnt<n-1)//连n-1条边都没有说明不连通
cout<<"orz";
else
cout<<ans;
return 0;
}
无穷大 ↩︎
时间仓促,如有错误欢迎指出,欢迎在评论区讨论,如对您有帮助还请点个推荐、关注支持一下
作者:博客园 - 某谦
出处:https://www.cnblogs.com/lmq742643
本文版权归作者和博客园共有,欢迎转载,但未经作者同意必须在文章页面给出原文链接,否则保留追究法律责任的权利。
若内容有侵犯您权益的地方,请公告栏处联系本人,本人定积极配合处理解决。


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 全程不用写代码,我用AI程序员写了一个飞机大战
· DeepSeek 开源周回顾「GitHub 热点速览」
· MongoDB 8.0这个新功能碉堡了,比商业数据库还牛
· 记一次.NET内存居高不下排查解决与启示
· 白话解读 Dapr 1.15:你的「微服务管家」又秀新绝活了