
【论文学习笔记】百度人脸识别算法 PyramidBox: A Context-assisted Single Shot Face Detector
论文地址:https://arxiv.org/pdf/1901.02350.pdf
Github地址:https://github.com/PaddlePaddle/models/tree/develop/PaddleCV/face_detection
PyramidBox是WIDER FACE人脸检测的三料冠军,先看一下它的效果吧。
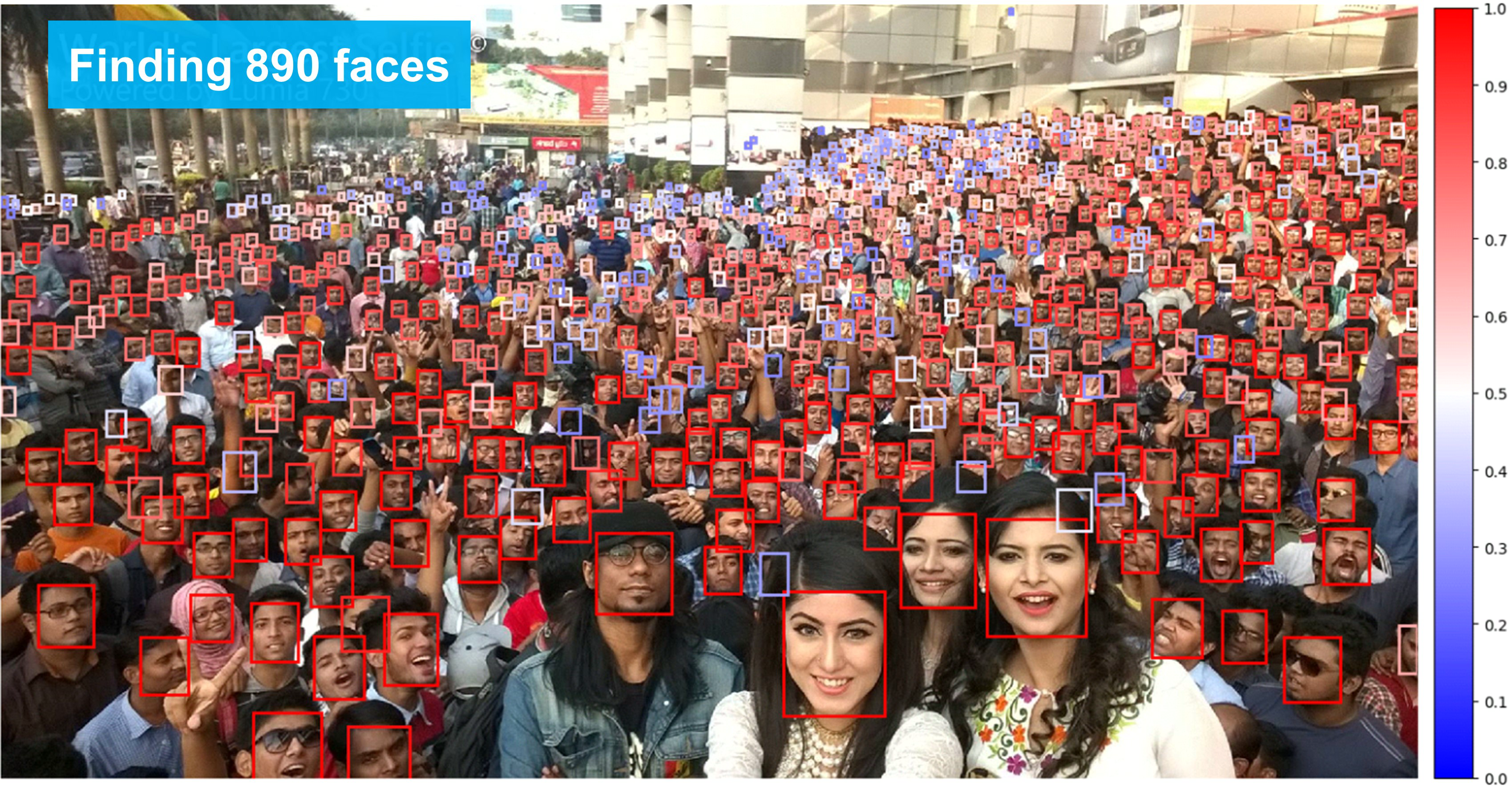
图中的1000张人脸被识别出890张,可以看出PyramidBox对比较小的、或者部分遮挡的人脸均有比较好的识别效果。
该论文的可概括为以下5点:
1. 本文提出了一种基于 anchor 的语境辅助方法,即 PyramidAnchors,从而引入有监督的信息来学习较小的、模糊的和部分遮挡的人脸的语境特征。
2. 设计了低层次特征金字塔网络 ( LFPN ) 来更好地融合语境特征和面部特征。同时,该方法可以在单次拍摄中较好地处理不同尺度的人脸。
3. 提出了一种语境敏感的预测模型,该模型由混合网络结构和最大输入输出层组成,从融合特征中学习准确的定位和分类。
4. 提出了可以感知尺度的数据-anchor-抽样策略,改变训练样本的分布,重点关注较小的人脸。
5. 在通用人脸检测基准 FDDB 和 WIDER FACE 上,达到了当前最佳水平。
Low-level Feature Pyramid Layers(LFPN)
PyramidBox是基于anchor的目标检测网络,主架构采用了与S3FD相同的extended VGG16。FPN中提出多尺度特征融合的方式强化特征重用,提高特征图的映射,PyramidBox借鉴了这种思想,提出了low-level的FPN(LFPN)。
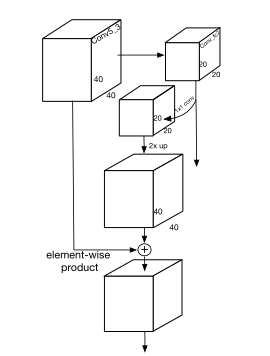
FPN的特征融合是从最顶层开始的,PyramidBox的作者认为最顶层的特征图感受野太大了,对于检测较小面孔没什么益处,反而可能会引入噪声。LFPN选择从从中间层开始构建自顶向下的结构,其感受野差不多是输入图像尺寸的一半。我们从源码中也能看出来,自顶向下的融合是从conv6(论文里是fc6和fc7转换为conv fc层)开始的,没有从conv7(论文里是conv6_1和conv6_2)和conv8(论文里是conv7_1和conv7_2)这两个最顶层开始。
def _low_level_fpn(self):
"""
Low-level feature pyramid network.
"""
def fpn(up_from, up_to):
ch = up_to.shape[1]
b_attr = ParamAttr(learning_rate=2., regularizer=L2Decay(0.))
conv1 = fluid.layers.conv2d(
up_from, ch, 1, act='relu', bias_attr=b_attr)
if self.use_transposed_conv2d:
w_attr = ParamAttr(
learning_rate=0.,
regularizer=L2Decay(0.),
initializer=Bilinear())
upsampling = fluid.layers.conv2d_transpose(
conv1,
ch,
output_size=None,
filter_size=4,
padding=1,
stride=2,
groups=ch,
param_attr=w_attr,
bias_attr=False,
use_cudnn=False)
else:
upsampling = fluid.layers.resize_bilinear(
conv1, out_shape=up_to.shape[2:])
conv2 = fluid.layers.conv2d(
up_to, ch, 1, act='relu', bias_attr=b_attr)
if self.is_infer:
upsampling = fluid.layers.crop(upsampling, shape=conv2)
# eltwise mul
conv_fuse = upsampling * conv2
return conv_fuse
self.lfpn2_on_conv5 = fpn(self.conv6, self.conv5)
self.lfpn1_on_conv4 = fpn(self.lfpn2_on_conv5, self.conv4)
self.lfpn0_on_conv3 = fpn(self.lfpn1_on_conv4, self.conv3)
与FPN相似,PyramidBox也将检测分布到多个尺度的特征图上,文章中提到选择lfpn_2、lfpn_1、lfpn_0、conv_fc7、conv6_2、conv7_2作为检测层,anchor的尺寸分别为16、32、64、128、256、512。其中lfpn_2、lfpn_1、lfpn_0分别是基于conv3、conv4_3、conv5_3的lfpn的输出层。
检测层后直接接上CPM,CPM的输出用于监督Pyramid anchor。论文中提到了通道数\(c_l=20\)
Context-sensitive Predict Module (CPM)
PyramidBox的第二创新点是将语境信息融入到了人脸识别中。毕竟一般人脸是不会单独出现的,身体和肩部的信息可以为人脸识别中提供语境层面的特征,这在检测被遮挡或部分缺失的人脸时能起到很好的辅助效果。比如下图中的这几个检测案例,人脸信息都不是很明显的,但是检测效果很好。

一开始看论文的时候有点懵,考虑到PyramidBox中设计的Context-sensitive Predict Module (CPM)是将SSH和DSSD两个模型的优势攒到一起,我又看了看SSH才大概搞懂(也可能理解错了)。
SSH是在三个不同深度的卷积层引入了不同的预测模块,从而检测不同大小的人脸。检测模块M1这一分枝将conv4-3 和conv5-3 的特征进行了融合,来检测最小尺寸人脸。M2则是是直接在conv5-3卷积层之后做检测,检测到稍大一些的人脸。M1与M2相比多了一个池化层,通过Max-pooling操作来增加感受野,使其能检测到比M2更大的人脸。
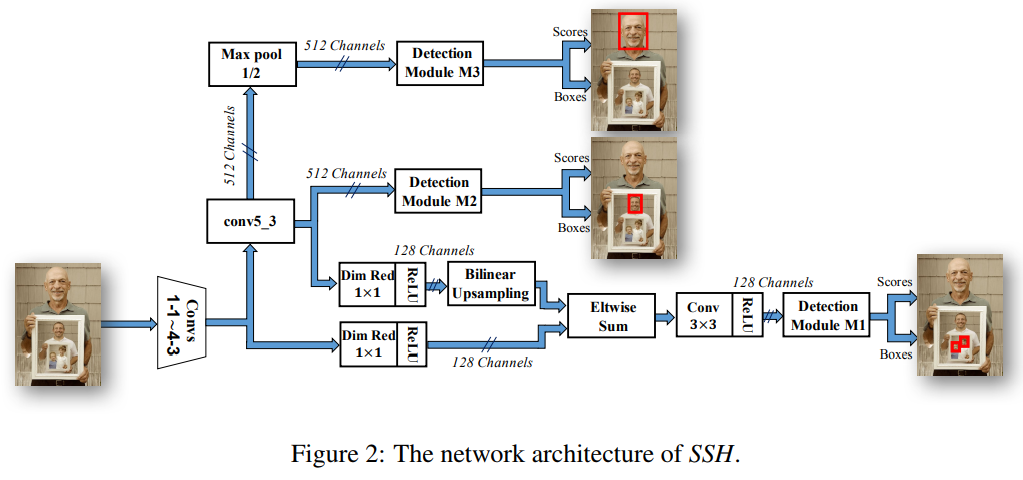
CPM吸收了这种思想,不过作者认为增加宽度和深度都会提升检测效果,因此用DSSD中的残差模块代替了SSH中的卷积模块

源码中也能看出,CPM是由这两部分组成。
def _cpm_module(self):
"""
Context-sensitive Prediction Module
"""
def cpm(input):
# residual
branch1 = conv_bn(input, 1024, 1, 1, 0, None)
branch2a = conv_bn(input, 256, 1, 1, 0, act='relu')
branch2b = conv_bn(branch2a, 256, 3, 1, 1, act='relu')
branch2c = conv_bn(branch2b, 1024, 1, 1, 0, None)
sum = branch1 + branch2c
rescomb = fluid.layers.relu(x=sum)
# ssh
b_attr = ParamAttr(learning_rate=2., regularizer=L2Decay(0.))
ssh_1 = fluid.layers.conv2d(rescomb, 256, 3, 1, 1, bias_attr=b_attr)
ssh_dimred = fluid.layers.conv2d(
rescomb, 128, 3, 1, 1, act='relu', bias_attr=b_attr)
ssh_2 = fluid.layers.conv2d(
ssh_dimred, 128, 3, 1, 1, bias_attr=b_attr)
ssh_3a = fluid.layers.conv2d(
ssh_dimred, 128, 3, 1, 1, act='relu', bias_attr=b_attr)
ssh_3b = fluid.layers.conv2d(ssh_3a, 128, 3, 1, 1, bias_attr=b_attr)
ssh_concat = fluid.layers.concat([ssh_1, ssh_2, ssh_3b], axis=1)
ssh_out = fluid.layers.relu(x=ssh_concat)
return ssh_out
self.ssh_conv3 = cpm(self.lfpn0_on_conv3)
self.ssh_conv4 = cpm(self.lfpn1_on_conv4)
self.ssh_conv5 = cpm(self.lfpn2_on_conv5)
self.ssh_conv6 = cpm(self.conv6)
self.ssh_conv7 = cpm(self.conv7)
self.ssh_conv8 = cpm(self.conv8)
PyramidAnchors
这一部分我看了好长时间,还是有点懵,不确定我的理解是不是准确,期待有百度的小伙伴能来补充。
基于anchor的检测器都是直接奔着目标物去的,作者认为这种方式忽略了上下文信息。作者提出了一种PyramidAnchors的anchor方法。 PyramidAnchors生成的anchor不仅与脸部信息相关,还包含了脸部以外的相关信息,比如头和身体。在实施中,对应每个目标人脸都生成与之相关的包含语境信息的anchor,设置方式是让目标人脸的大小和anchor的大小相匹配。
先举个例子再分析细节吧。
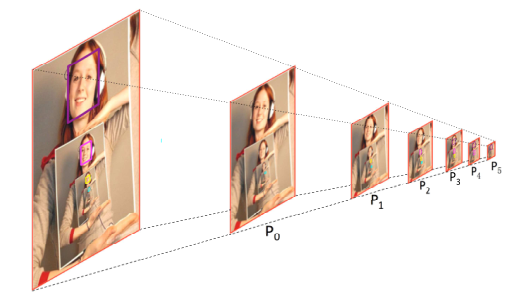
论文中提到,当检测最大的这张脸时(紫色框),利用的是P3、P4和P5三个尺度上的anchor,其中P3用来检测脸,P4用来检测与脸相关的头部,P5用来检测与脸相关的身体,分别对应了CPM中的三个输出,这三个输出特征图的大小是不一样的。
PyramidAnchors使用anchor进行预测,首先要给不同的anchor打上label,假设\(anchor_{i,j}\)是第\(i\)个特征图上的第\(j\)个anchor,定义其\(k\)阶pyramid-anchor的label为:
\(label_k(anchor_{i,j})=\left\{\begin{matrix}1
&if\ iou(anchor_{i,j}·s_i/s_{pa}^{\ k},\ region_{target})>threshold\\ 0
&otherwise
\end{matrix}\right.\)
这个公式的意思是要定义K个label(文中K=2,\(label_1\)、\(label_2\)和\(lable_3\)分别对应人脸、头部和身体的label),也就是说用于预测人类的PyramidAnchors的层数是三层。至于label的值是1还是0,取决于\((anchor_{i,j}·s_i/s_{pa}^{\ k}\)和目标区域\(region_{target}\)的iou值。\(s_i\)表示特征图的stride size,\((anchor_{i,j}·s_i\)是该\(anchor\)对应原图中的区域,\((anchor_{i,j}·s_i/s_{pa}^{\ k}\)指的是以步长\(s_{pa}^{\ k}\)下采样后的区域,试验表明K=2、\(s_{pa}=2\)的情况效果最好。

Data-anchor-sampling
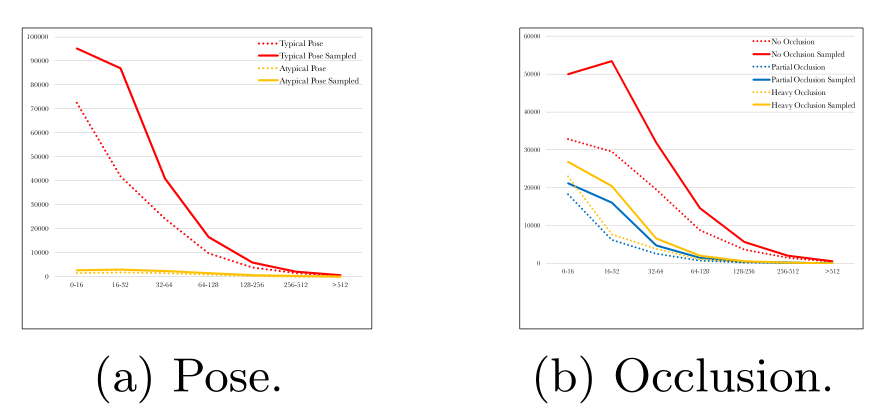
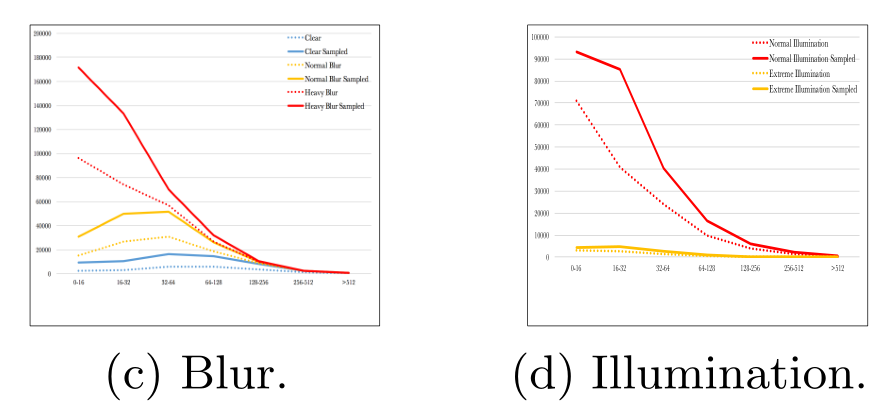
Data-anchor-sampling作为一种扩增数据的方式,通过将图像中较大的人脸缩放至小人脸,增加训练样本在不同尺度上的多样性。
可以看到,WIDER FACE训练集中的四种类型数据:a 姿态(典型和非典型) 、b 遮挡情况(无遮挡、部分遮挡、严重遮挡)、c 模糊度(清晰、一般、模糊)和d 曝光度(正常、过曝),小尺寸的人脸都变多了不少。
操作方式论文中举了个例子,很好懂,我就不多解释了。

以上,就是Pyramidbox算法的内容
|
作者:李是李雅普诺夫的李 出处:http://www.cnblogs.com/lky-learning/ 如需交流或转载,请联系本人,欢迎关注公众号:一刻AI 如果文中有什么错误,欢迎指出。以免更多的人被误导。 |

|

 浙公网安备 33010602011771号
浙公网安备 33010602011771号