
本文主要介绍机器学习的基本知识,通过本文可以快速复习机器学习的主要内容。主要目录如下
一、特征工程
二、线性回归
三、逻辑回归
四、树模型
五、优化算法
六、激活函数
七、过拟合与欠拟合
---------------------------------------------------------------------------------------------------------------------------------------
一、特征工程
1、特征提取
(1)用户行为数据
(2)用户画像/标签
(3)Embedding:word2vec、glove、Node2Vec、DSSM、ELMO、GPT、BERT
(4)LDA
(5)TF/TFIDF
2、特征变换
(1)多项式变换
(2)PCA、SVD
(3)标准化
(4)离散化
3、特征选择
(1)与label无关的方法
- 方差
- 覆盖率
(2)与label有关的方法
- 相关系数
- 互信息:I(x,y)=H(Y)-H(Y|X),即在给定X条件下,Y变量不确定性程度缩减量。其中离散特征直接利用公式求解,连续变量则可以通过积分方式求解,另一种方式是先离散化,再按照上面公式求解。
- IV值:IV=(P1-P0)*WOE=(P1-P0)*ln(P1/P0),其中P1表示正样本分布,P0表示负样本分布。属于二元分类特征的评价方式。
- 卡方检验:假设自变量与因变量之间是相互独立,从而判断观测值与实际值之间的偏差。偏差往往用自变量与期望E之间的差值表示。偏差越大,假设不成立,则对立面成立。
(3)基于模型的方法
- 基于L1正则项的特征选择
- 基于树模型的特征重要性:其中这个特征重要性主要是在构建树的过程中,根据分裂特征的策略选择重要的特征依次进行分裂构建树。其中,分裂策略有:信息增益,信息增益率、gini指数等。
(4)递归消除法
- 单因子构建模型的方式进行筛选
特征筛选的优点:
- 降低过拟合的风险,提升算法的效果。实际工作中验证确实如此。
- 提升算法的训练速度,降低计算开销。
- 更少的特征意味着更好的可解释性。
二、线性回归
- 损失函数是均方误差——MSE。
三、逻辑回归
- 损失函数-交叉墒损失函数
Question:为什么是交叉墒损失函数呢?
这个其实要从信息量的角度去考虑这个问题,首先我们来了解一下几个概念:
(1)信息量:衡量某个事件或者变量不确定性的程度
(2)信息墒:所有信息量的期望值,则可以表示如下所示:

(3)相对墒(又称K-L散度):简单理解是衡量两个概率分布之间的差异。也可以理解成是衡量同一个变量两个概率分布P(x) 和Q(x)之间的差异。其公式如下:
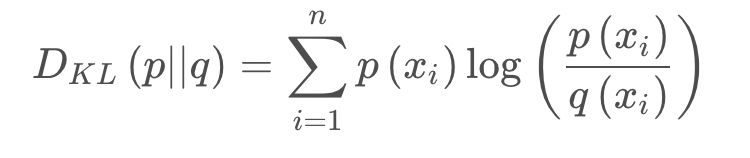
理论上逻辑回归的loss function应该是相对墒。But,当我们把相对墒进一步展开后可以发现:KL散度 = 交叉熵 - 信息熵
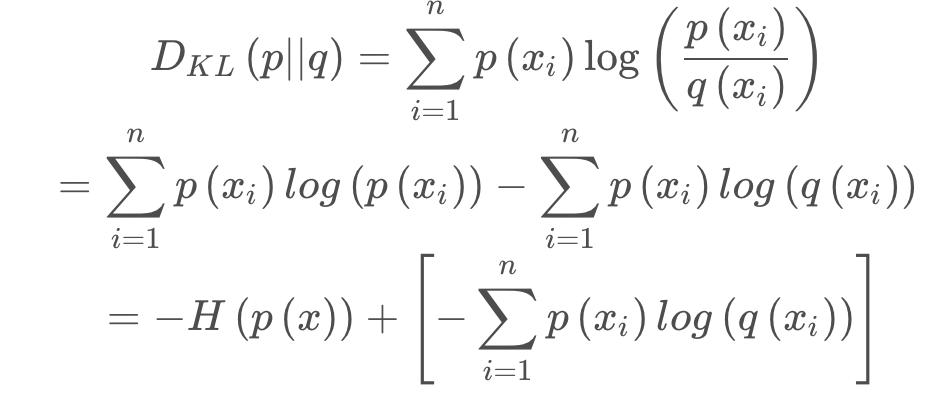
而我们的信息墒上面讲了是期望值,往往是一个常数。所以相对墒本质上就是交叉墒。
另一种推导方法:基于最大似然函数来进行推理。
不妨先用二分类作为我们的研究对象,则我们可以假设如下:对于某个样本输入正负样本的概率如下:
p(1|x)=h(x)
p(0|x)=1-h(x)
则N个样本对应的整体的概率分布如下所示:
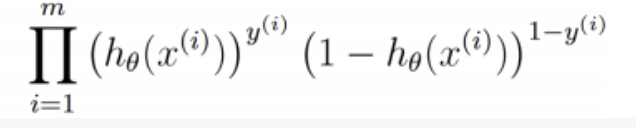
,此时由最大似然函数我们可知最大似然估计如下所示:

上式,我们计算的是最大似然函数估计,得到的是最大值,而我们的损失函数往往是计算最小值,为了计算最小值,我们在上式最前面添加一个负号。则最终LR的损失函数如下所示:
![]()
四、树模型
1、决策树算法:ID3、C4.5、CART
这三种决策树的算法主要区别是体现在构建树的过程中,衡量特征分裂的好坏的指标不同而已。具体的:
(1)ID3是以信息增益作为选择最优特征分裂的策略;所谓信息增益是根据某个特征分裂变换前后信息墒变换量。公式如下所示:
![]()
缺点:
- ID3没有预剪枝策略,容易过拟合
- 信息增益容易偏向特征值较多的特征
- 只能处理离散特征值,连续性的值一般需要做离散化之后才可以。
(2)C4.5
为了解决ID3的缺点作出相应的改进:
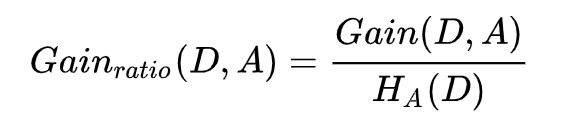
- 首先C4.5是以信息增益率为选择分裂特征的策略。其公式如下所示:
- C4.5使用了预剪枝和后剪枝的方式来减少过拟合现象
- 设置节点内样本数量限制,即某节点样本数量低于某阈值时,则不分裂,直接作为叶子结点
- 节点分裂前后,对应准确率应有所提升,否则不分裂。
- 后剪枝是遍历已生成的树,利用当前节点代替其子树,若正确率不降,则可以剪枝。否则不可以剪枝。
- C4.5对连续特征进行自动离散化,首先对连续特征进行排序,再对相邻特征值作为离散化的值对特征进行离散化
- C4.5也对缺失值做了相应的处理,但一般情况下,缺失值问题会在特征工程阶段已处理。
缺点:
- ID3和C4.5都是多叉树,若用二叉树效果会更高
- C4.5只能用户分类问题,回归问题无法适用
- C4.5计算信息增益率时耗时比较严重,且需要对连续特征进行排序并离散化。
(3)CART
前面提到ID3和C4.5都是多叉树,且特征分裂计算墒效率较低。CART则是改用二叉树的方式来构建决策树,并且才用gini指数来选择分裂特征,从而提高算法的效率。其中gini指数如下所示:
其中,pk表示样本分对的概率,1-pk表示样本分错的概率。基尼指数代表了模型的不纯度,基尼系数越小,不纯度越低,特征越好。
CART是分类回归树,既可以用来做分类模型也可以用来做回归模型,对于分类问题输出是类别较多的那个结果;对于回归问题,输出是叶子结点的均值或中位数。
2、随机森林:RF
上面我们讲到了决策树算法可以很好的对样本进行分类。而在实际应用中,决策树输出结果从精度上和稳定性上都存在不小的波动和差异。为了解决算法的波动性的问题,人们提出了一种集成的方法——Bagging方法。即利用多棵决策树来对目标问题进行建模。最终采取多票表决的形式进行预测。
优点:
- 对样本和特征进行采样,分布式的构建多棵决策树
- 对样本的异常值不敏感
3、GBDT、XGBOOST、LightGBM
(1)GBDT
GBDT也是一种集成学习方法——Boosting方法,该方法是递归的去构建每一棵树,并且每一棵树都是在拟合前一棵树的残差。这样的一种形式我们称之为Boosting方法。
GBDT与RF之间的差异:
相同点:
- 都是CART二叉树构建的集成学习算法
- 都可以用户分类和回归问题
不同点:
- RF是bagging方法,GBDT是Boosting方法
- RF可以并行构建二叉树,GBDT是串行方式构建回归二叉树
- RF是降低模型的方差,GBDT是降低模型的误差
- RF构建树时是随机抽样的样本和特征,GBDT是全部的样本
- RF输出结果是多票表决,GBDT是结果求和
- RF泛化能力较强,GBDT容易过拟合。
(2)XGBOOST
XGBOOST算法是针对GBDT从工程上、和算法精度上引入二阶偏导数和正则项 进行优化,XGBOOST算法中对应损失函数如下所示:
 其中,
其中,

l表示损失函数,一般是MSE和交叉墒等。第二项是正则项,可以控制树的复杂度,防止过拟合。在损失函数求解的过程中,对损失函数使用了泰勒展开,并保留了前三项(即保留了二阶偏导数)。如下所示:

XGBOOST的叶子节点的权重:
- 模型优化上:
- 基础模型优化:
- gbdt用的是cart回归树作为基础模型,xgboost还可以用线性模型,此时相当于带有L1和L2正则项的逻辑回归(分类问题)和线性回归(回归问题)
- 损失函数优化:
- gbdt对loss是泰勒一级展开,xgboost是泰勒二级展开
- gbdt 损失函数没有正则,xgboost在损失函数中引入 叶子结点个数 和 L1、L2正则项
- 特征分裂的优化:
- xgboost实现了一种分裂节点寻找的近似算法【近似直方图算法】,用于加速和减少内存消耗,而不是gbdt的暴力搜索
- 节点分割算法解决了梯度值方向的问题,gbdt分割用了购物车的方法进行加权
- XGBoost对缺失值不敏感,能自动学习其分裂方向
- 其他正则化的优化:
- 特征采样
- 样本取样
- 基础模型优化:
- 工程优化上:
- xgboost在对特征进行了分块预排序,对特征预先进行排序并保存为block,后续迭代中重复使用,减少计算;同时在计算分割点时,可以并行计算
- 缓存感知、核外计算
- 支持多元化计算可以运行在MPI,YARN上,受益基础支持容错的多元化通信框架rabbit、
- XGBoost采用预排序,在迭代之前,对结点的特征做预排序,遍历选择最优分割点,数据量大时,贪心法耗时,LightGBM方法采用histogram算法,占用的内存低,数据分割的复杂度更低,但是不能找到最精确的数据分割点。同时,不精确的分割点可以认为是降低过拟合的一种手段。
- LightGBM借鉴Adaboost的思想,对样本基于梯度采样,然后计算增益,降低了计算
- LightGBM对列进行合并,降低了计算
- XGBoost采样level-wise策略进行决策树的生成,同时分裂同一层的节点,采用多线程优化,不容易过拟合,但有些节点分裂增益非常小,没必要进行分割,这就带来了一些不必要的计算;LightGBM采样leaf-wise策略进行树的生成,每次都选择在当前叶子节点中增益最大的节点进行分裂,如此迭代,但是这样容易产生深度很深的树,产生过拟合,所以增加了最大深度的限制,来保证高效的同时防止过拟合。
(3)LightGBM《LightGBM:A HIghtly Efficient Gradient Boosting Decision Tree》
- 尽量减少样本数据
- 通过GOSS(gradient of sildes sampling)的方法,即对样本按照梯度的大小进行降序排序,这里梯度比较小的样本是模型已经学习到了,所以对应的误差小,即梯度小。
-
- GOSS的思想就是保留那些没有学习到的样本(梯度比较大的样本)
-
- 对梯度较小的样本进行随机采样的方法来保留整体样本的分布。这里面会涉及到两个参数:一个梯度大的样本采样比例a;另一个是梯度小的样本采样比例b。
- 尽量减少特征,减少特征需要回答两个问题:1、如何合并?2、那些特征需要合并?则对应的方法如下:
-
- 合并特征:如何合并特征,论文提出的方法是扩展特征的边界。比如:特征A对应的边界是(0,10],特征B的边界是(0,20],则合并的 方法是在特征B的基础上+10,再融合特征A得到特征C的边界是(0,30]。
-
- 哪些特征应该合并呢?
方法是:通过构建有颜色的图的方法。即将特征作为顶点,如果两个特征不会相互排斥则构建一条边。不会相互排斥的特征非常少,一般情况算法是容忍一定比例的冲突。
五、优化算法,参考文献:https://arxiv.org/pdf/1609.04747.pdf
这里主要讲一下深度学习当中应用到的优化算法,主要是将随机梯度下降算法的家族及其变种,变种主要表现两个方面:
(1)一个是从学习率的角度,通过改变学习率来提升优化算法的效果;
(2)另一个是从更新速度的角度去提升优化算法的更新速度,如动量。
- SGD 随机梯度下降:即每次根据一个样本去更新模型的参数。缺点:无法得到全局最优,且对异常样本非常敏感

其中,(xi,yi)表示样本i。
- 批量梯度下降:即每次根据全量的样本去更新模型的参数。缺点:算法复杂度较高,需要较大的内存支撑

- mini-batch梯度下降:即每次根据一小批量的样本进行模型参数更新。该方法综合了SGD和批量梯度下降的优点。

其中,n表示bacth的大小。
- Momentum:带有动量的梯度下降算法,更新公式如下所示:
其中,Vt-1表示上一次的更新速度,即动量。
- Adagrad:对学习率进行修改,每个样本的学习率都不一样。错误的样本对应的学习率较大。其公式如下:


将上面两个式子合并可得到如下所示:

- Adadelta:是在Adagrad基础上进一步扩展。
- RMSprop:该方法是结合momentum和adagrad方法的各自的优点进行融合的方法。其公式如下所示:
上式中[g]t-1是表示的上次更新的速度,即动量。生成新的参数E,从而来调整当前的学习率。
- Adam:上面RMSProp方法中,并没有完全把动量引入进来,所以Adam是在RMSProp基础上完全把动量引入进来。其公式如下所示:
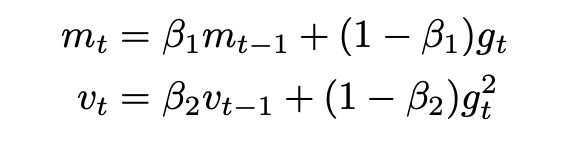
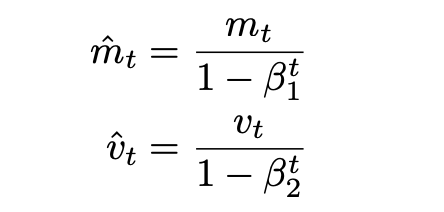
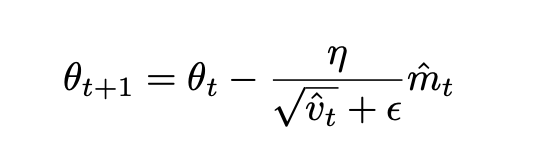
其中,vt就是更新速度,mt是动量。
六、激活函数
- sigmoid函数,其表达式及图像如下所示
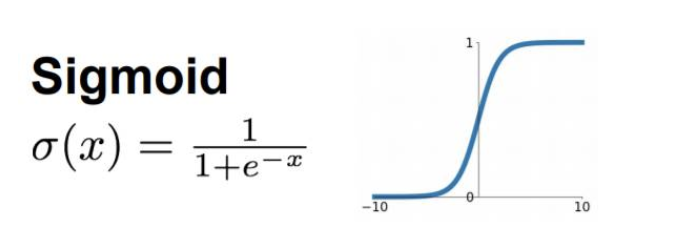
从图像当中我们可以看出,当x较大或者较小时,sigmoid对应的梯度趋近0,容易导致梯度消失。
- Relu函数
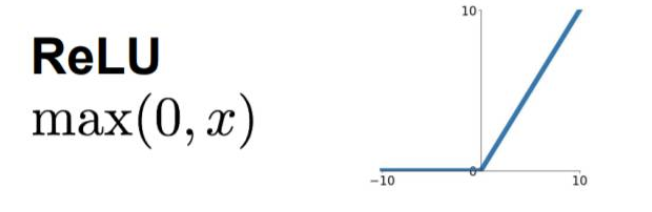
当x>0时,对应的梯度恒等于1,当x<0时,梯度等于0,导致神经元无法更新。但实际场景中,往往一般不会出现x小于0的情况。
- ELU
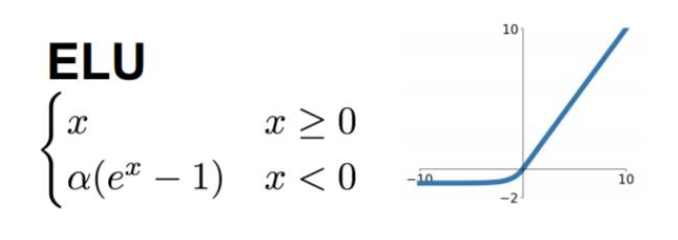
其融合sigmoid和ReLU的优点,左侧具有软饱和性,右侧具有硬饱和性。
七、过拟合与欠拟合
(1)过拟合:当模型在训练集中表现效果很好,在测试集中表现非常差。
- 模型角度
- 添加正则项:L1正则和L2正则:其中L1正则是y=|X|,在x=0处不可导,且在x=0使得结果最小。L2正则y=||x||^2。求导之后还有一次项,对参数更新具有一定的泛化作用。
- early stopping
- 结合多种模型结果:
- Bagging训练多个模型进行多票表决
- Boosting训练减少网络层数和神经元个数:如dropout
- 数据角度
- 获取更多的训练数据
- 增加一定比例的噪声数据来提升模型的泛化能力
(2)欠拟合:当模型在训练集表现效果较差时。
- 模型角度
- 增加模型的复杂度,如采用boosting方法,增加网络的层数和神经元个数
- 选择算法优化精度较高的模型
- 数据角度
- 分析错例的原因,挖掘有效的特征
- 增加更多的训练数据
八、RNN与LSTM原理
RNN是递归神经网络,其网络结构如下所示:

BP算法:
RNN的训练:循环递归神经网络的训练类似传统的神经网络的训练,也是使用反向传播算法,但是有所变化。因为循环神经网络在所有时刻的参数是共享的,但是每个时刻输出的梯度不仅依赖当前时刻的计算,还依赖之前时刻的计算,然后将梯度进行相加。我们称之为BPTT。
这与我们深度前馈神经网络中使用的标准反向传播算法基本相同。主要的差异就是我们将每时刻W的梯度进行相加。在传统的神经网络中,我们的层之间并没有共享参数,所以不需要进行相加。
结论:
RNN的关键点之一就是他们可以用来连接之前的信息到当前的任务上。例如使用过去的视频片段来推测当前段的理解。但是当相关的信息和当前待预测位置之间的间隔变得非常大时,RNN会丧失学习较远信息的能力。所以利用BPTT算法训练出来的RNN循环神经网络很难学习长期依赖,原因在于梯度消失和爆炸问题。所谓梯度消失和爆炸的原因是因为BPTT在求梯度的过程中,由于当前时刻是依赖上一时刻的输出,则对应的梯度是累乘的,梯度有可能是大于1或者小于1,累乘之后有可能出现梯度爆炸和消失的现象。于是人们就设计出来了LSTM。
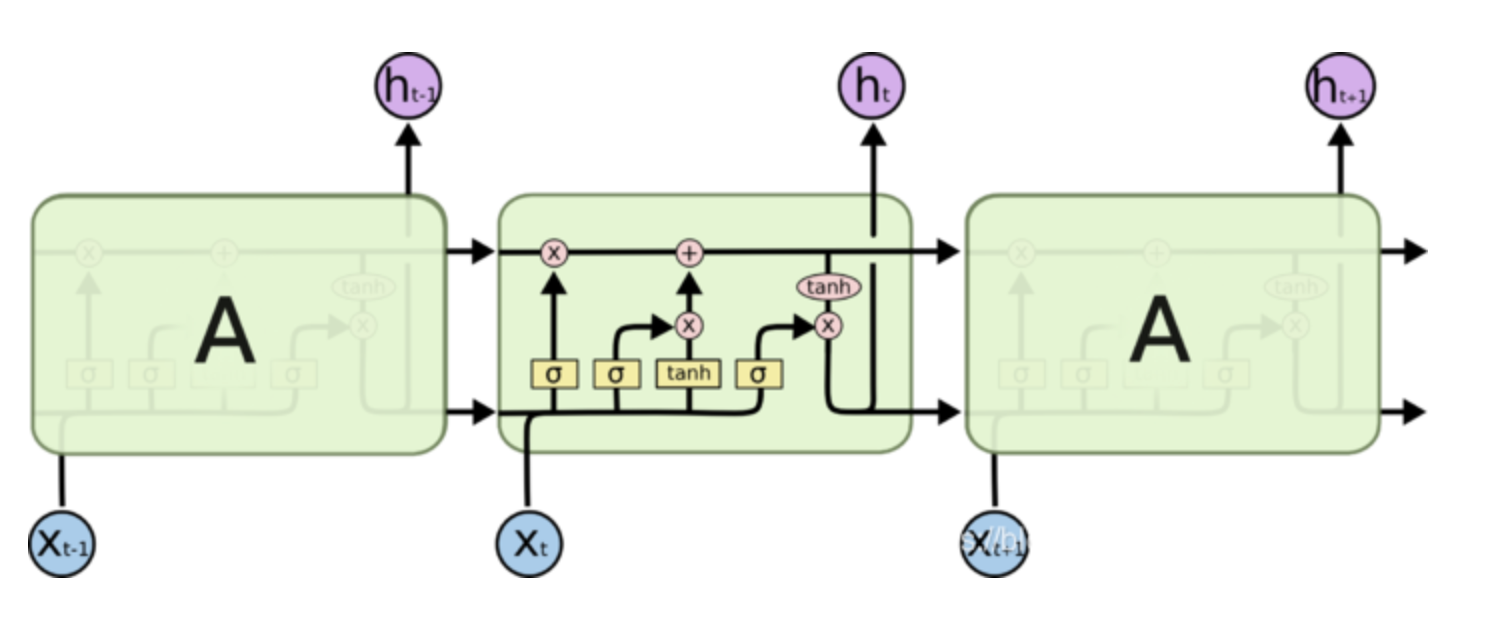
LSTM
LSTM网络结构如下所示:主要包含三个门:遗忘门、输入门和输出门
遗忘门:主要决定从cell中丢弃多少信息,主要通过控制遗忘门的sigmod来决定丢弃多少信息。
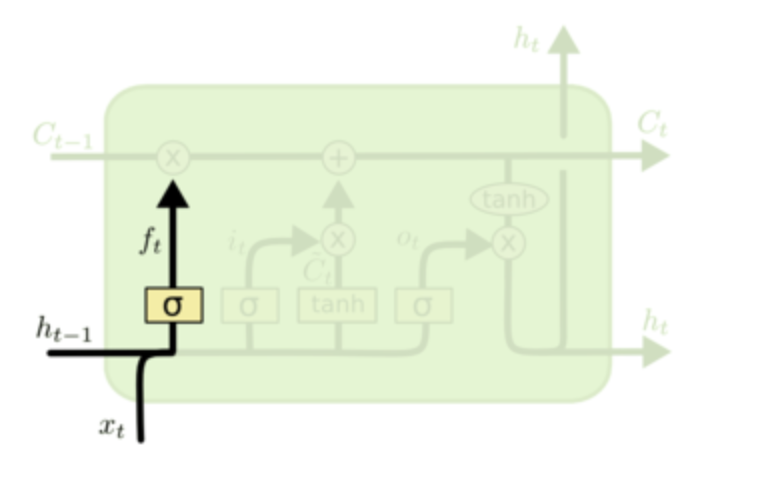
![]()
输入门:主要决定有多少新的信息加入到cell中。同样是通过sigmod函数来控制多少信息增加到cell中。

输出门:决定最终输出什么到下一个状态。同样也是通过sigmod来确定。



