realsense D435I获取RGB图、深度图和左右图
system:Ubuntu18.04.4LTS
memory: 12GiB
CPU: i5-4590
Pycharm Python
OpenCV
1 import pyrealsense2 as rs 2 import numpy as np 3 import cv2 4 5 pipeline = rs.pipeline() 6 7 config = rs.config() 8 9 config.enable_stream(rs.stream.color, 640, 480, rs.format.bgr8, 15) #10、15或者30可选,20或者25会报错,其他帧率未尝试 10 config.enable_stream(rs.stream.infrared, 1, 640, 480, rs.format.y8, 15) 11 config.enable_stream(rs.stream.infrared, 2, 640, 480, rs.format.y8, 15) 12 config.enable_stream(rs.stream.depth, 640, 480, rs.format.z16, 15) 13 14 profile = pipeline.start(config) 15 16 # Getting the depth sensor's depth scale (see rs-align example for explanation) 17 depth_sensor = profile.get_device().first_depth_sensor() 18 depth_scale = depth_sensor.get_depth_scale() 19 print("Depth Scale is: " , depth_scale) 20 21 clipping_distance_in_meters = 1 #1 meter 22 clipping_distance = clipping_distance_in_meters / depth_scale 23 24 # Create an align object 25 # rs.align allows us to perform alignment of depth frames to others frames 26 # The "align_to" is the stream type to which we plan to align depth frames. 27 align_to = rs.stream.color 28 align = rs.align(align_to) 29 30 31 try: 32 while True: 33 frames = pipeline.wait_for_frames() 34 35 # Align the depth frame to color frame 36 aligned_frames = align.process(frames) 37 # Get aligned frames 38 aligned_depth_frame = aligned_frames.get_depth_frame() # aligned_depth_frame is a 640x480 depth image 39 if not aligned_depth_frame: 40 continue 41 depth_frame = np.asanyarray(aligned_depth_frame.get_data()) 42 # 将深度图转化为伪彩色图方便观看 43 depth_colormap = cv2.applyColorMap(cv2.convertScaleAbs(depth_frame, alpha=0.03), cv2.COLORMAP_JET) 44 cv2.imshow('1 depth', depth_colormap) 45 46 # color frames 47 color_frame = aligned_frames.get_color_frame() 48 if not color_frame: 49 continue 50 color_frame = np.asanyarray(color_frame.get_data()) 51 cv2.imshow('2 color', color_frame) 52 53 # left frames 54 left_frame = frames.get_infrared_frame(1) 55 if not left_frame: 56 continue 57 left_frame = np.asanyarray(left_frame.get_data()) 58 cv2.imshow('3 left_frame', left_frame) 59 60 # right frames 61 right_frame = frames.get_infrared_frame(2) 62 if not right_frame: 63 continue 64 right_frame = np.asanyarray(right_frame.get_data()) 65 cv2.imshow('4 right_frame', right_frame) 66 67 c = cv2.waitKey(1) 68 69 70 71 # 如果按下ESC则关闭窗口(ESC的ascii码为27),同时跳出循环 72 if c == 27: 73 cv2.destroyAllWindows() 74 break 75 76 finally: 77 # Stop streaming 78 pipeline.stop() 79 80 #深度图上色参考https://github.com/IntelRealSense/librealsense/blob/jupyter/notebooks/distance_to_object.ipynb 81 #对齐参考:https://github.com/IntelRealSense/librealsense/blob/master/wrappers/python/examples/align-depth2color.py 82 #左右图获取参考https://blog.csdn.net/Hanghang_/article/details/102489762 83 #其他参考https://blog.csdn.net/Dontla/article/details/102701680
如果Alt+shift+Enter 安装不了cv2,那就直接在pycharm的terminal 敲命令,其他也是一样
效果如下:
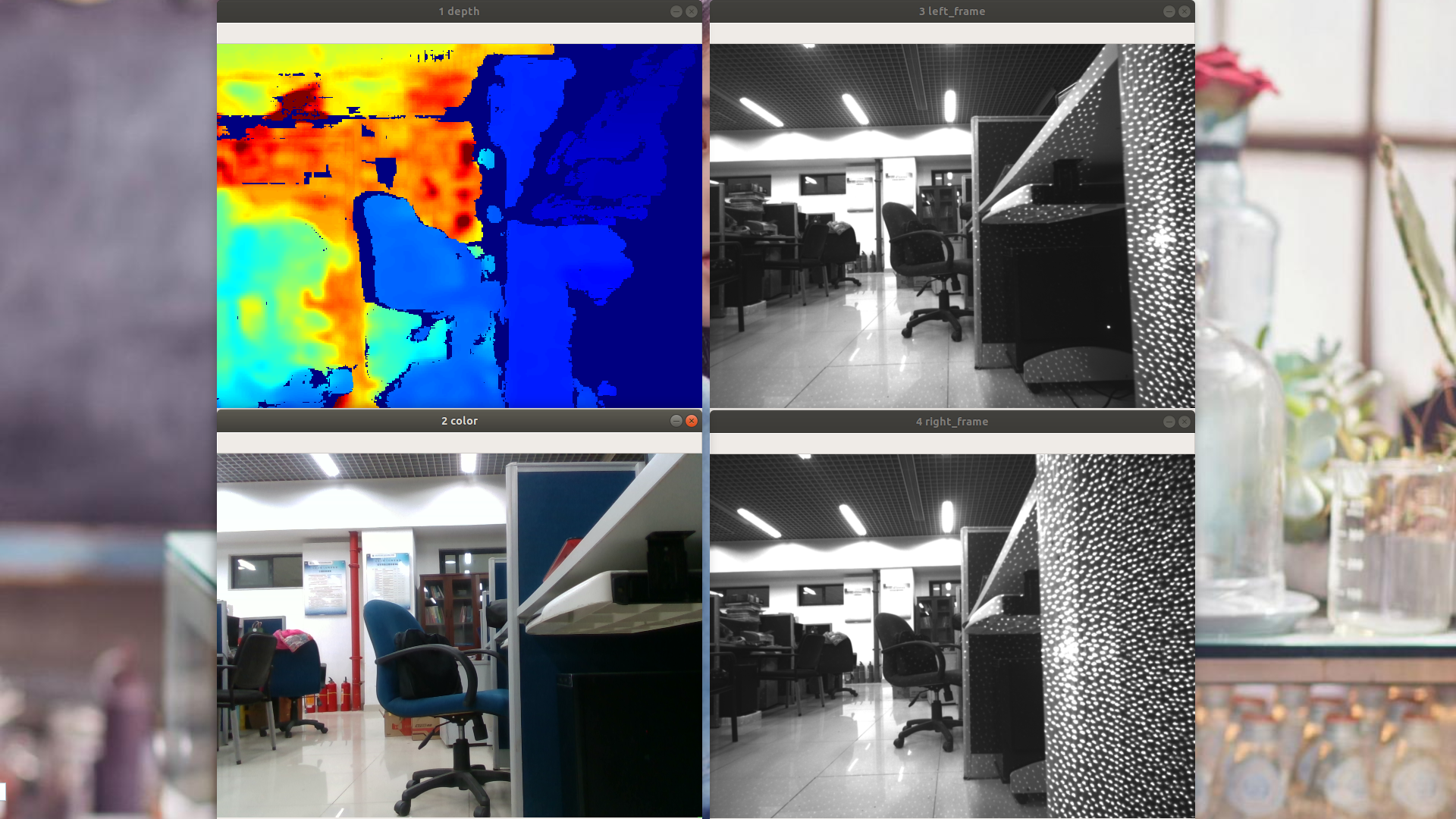
红外光斑以后再想办法去除,目前对我影响不大。目前只知道ros环境下可以配置关闭。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号