世界坐标系(World Coordinate System,简称WCS)是由三个垂直并相交的坐标轴X轴、Y轴和Z轴构成,一般显示在绘图区域的左下角,如图1-7所示。X轴和Y轴的交点就是坐标原点O,X轴正方向为水平向右,Y轴正方向为垂直向上,Z轴正方向为垂直于XOY平面,指向操作者,在二维绘图状态下,Z轴是不可见的。世界坐标系是一个固定不变的坐标系,其坐标原点和坐标轴方向都不会改变,是系统默认的坐标系。
①机器人基本坐标系
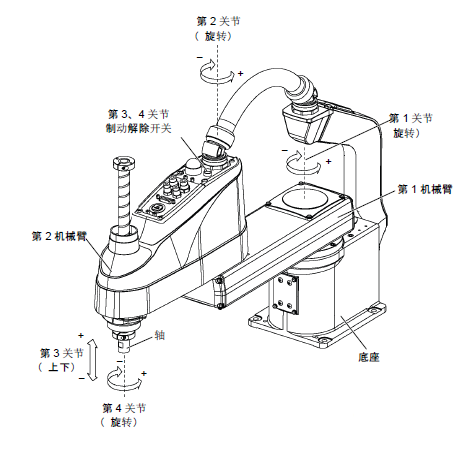
定义:机器人安装底座的中心,出厂时已经定义好,操作界面模式中”默认”就是机器人坐标,”当前位置”显示的是法兰平面中心点的值(6轴);丝杆末端的平面中心(4轴)。
②本地坐标系
定义:机器人坐标系的偏移(其他系统也叫工件坐标系)
③工具坐标系
定义:定义在工具末端的用户坐标