STM32之USART配置
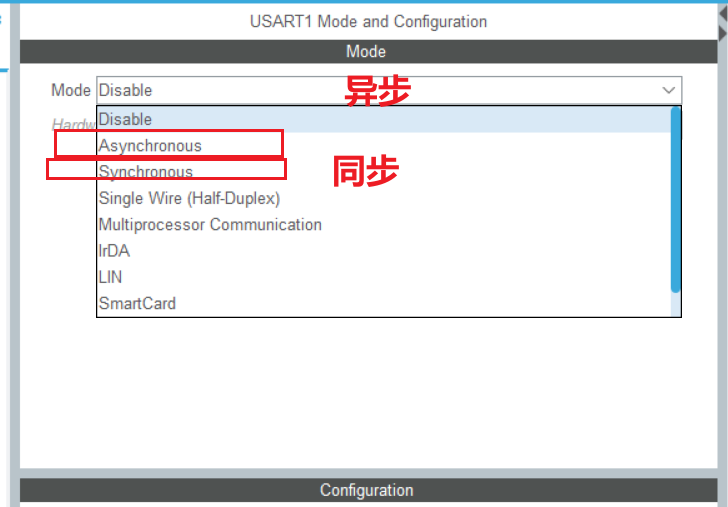
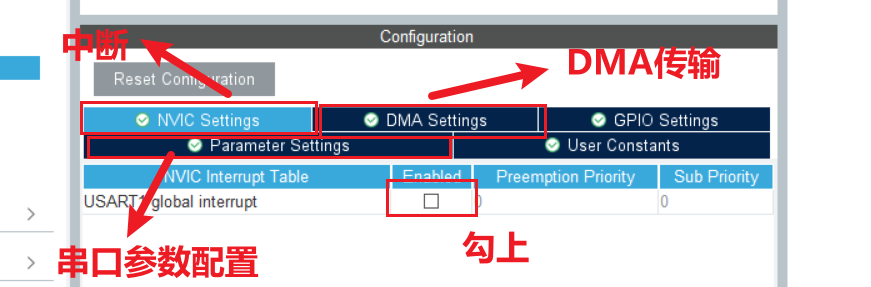
一、stm32cubeMX配置
二、函数配置
2.1 串口接收回调函数
/**
* @brief Rx传输回调函数
* @param huart: UART句柄类型指针
* @retval 无
*/
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
if(huart->Instance == USART_UX) /* 如果是串口1 */
{
if((g_usart_rx_sta & 0x8000) == 0) /* 接收未完成 */
{
if(g_usart_rx_sta & 0x4000) /* 接收到了0x0d */
{
if(g_rx_buffer[0] != 0x0a)
{
g_usart_rx_sta = 0; /* 接收错误,重新开始 */
}
else
{
g_usart_rx_sta |= 0x8000; /* 接收完成了 */
}
}
else /* 还没收到0X0D */
{
if(g_rx_buffer[0] == 0x0d)
{
g_usart_rx_sta |= 0x4000;
}
else
{
g_usart_rx_buf[g_usart_rx_sta & 0X3FFF] = g_rx_buffer[0] ;
g_usart_rx_sta++;
if(g_usart_rx_sta > (USART_REC_LEN - 1))
{
g_usart_rx_sta = 0; /* 接收数据错误,重新开始接收 */
}
}
}
}
}
if(huart->Instance == USART3) /* 如果是串口1 */
{
if((g_usart3_rx_sta & 0x8000) == 0) /* 接收未完成 */
{
if(g_usart3_rx_sta & 0x4000) /* 接收到了0x0d */
{
if(g_rx_buffer[0] != 0x0a)
{
g_usart3_rx_sta = 0; /* 接收错误,重新开始 */
}
else
{
g_usart3_rx_sta |= 0x8000; /* 接收完成了 */
}
}
else /* 还没收到0X0D */
{
if(g_rx_buffer[0] == 0x0d)
{
g_usart3_rx_sta |= 0x4000;
}
else
{
g_usart3_rx_buf[g_usart3_rx_sta & 0X3FFF] = g_rx_buffer[0] ;
g_usart3_rx_sta++;
if(g_usart3_rx_sta > (USART3_REC_LEN - 1))
{
g_usart3_rx_sta = 0; /* 接收数据错误,重新开始接收 */
}
}
}
}
}
}
2.2 串口重定向
#if 1
#pragma import(__use_no_semihosting)
//标准库需要的支持函数
struct __FILE
{
int handle;
};
FILE __stdout;
//定义_sys_exit()以避免使用半主机模式
void _sys_exit(int x)
{
x = x;
}
//重定义fputc函数
int fputc(int ch, FILE *f)
{
while((USART1->ISR&0X40)==0);//循环发送,直到发送完毕
USART1->RDR = (u8) ch;
return ch;
}
void _ttywrch(int ch)
{
ch = ch;
}
#endif
或者
//串口1 printf重定向
//int _write(int file, char *ptr, int len)
//{
// HAL_UART_Transmit(&huart1, (uint8_t *)ptr, len, 0xFFFF);
// return len;
//}
2.3 UARTx_PRINTF
#if UART4_PRINTF
void u4_printf(char* fmt,...)
{
u16 i;
va_list ap;
va_start(ap,fmt);
vsprintf((char*)UART4_TX_BUF,fmt,ap);
va_end(ap);
i=strlen((const char*)UART4_TX_BUF);
if(HAL_UART_Transmit(&huart4, (uint8_t*)UART4_TX_BUF, i, 1000)!= HAL_OK)
{
Error_Handler();
}
}
#endif
#if USART3_PRINTF
//串口3,printf 函数
void u3_printf(char* fmt,...)
{
u16 i;
va_list ap;
va_start(ap,fmt);
vsprintf((char*)USART3_TX_BUF,fmt,ap);
va_end(ap);
i=strlen((const char*)USART3_TX_BUF);
if(HAL_UART_Transmit(&huart3, (uint8_t*)USART3_TX_BUF, i, 1000)!= HAL_OK)
{
Error_Handler();
}
// HAL_UART_Transmit(&UART1_Handler,(uint8_t*)USART_RX_BUF,len,1000); //发送接收到的数据
// while(__HAL_UART_GET_FLAG(&UART1_Handler,UART_FLAG_TC)!=SET); //等待发送结束
}
#endif
#if USART2_PRINTF
void u2_printf(char* fmt,...)
{
u16 i;
va_list ap;
va_start(ap,fmt);
vsprintf((char*)USART2_TX_BUF,fmt,ap);
va_end(ap);
i=strlen((const char*)USART2_TX_BUF);
if(HAL_UART_Transmit(&huart2, (uint8_t*)USART2_TX_BUF, i, 1000)!= HAL_OK)
{
Error_Handler();
}
// HAL_UART_Transmit(&UART1_Handler,(uint8_t*)USART_RX_BUF,len,1000); //发送接收到的数据
// while(__HAL_UART_GET_FLAG(&UART1_Handler,UART_FLAG_TC)!=SET); //等待发送结束
}
#endif
#if USART1_PRINTF
void u1_printf(char* fmt,...)
{
u16 i;
va_list ap;
va_start(ap,fmt);
vsprintf((char*)USART_TX_BUF,fmt,ap);
va_end(ap);
i=strlen((const char*)USART_TX_BUF);
if(HAL_UART_Transmit(&huart1, (uint8_t*)USART_TX_BUF, i, 1000)!= HAL_OK)
{
Error_Handler();
}
// HAL_UART_Transmit(&UART1_Handler,(uint8_t*)USART_RX_BUF,len,1000); //发送接收到的数据
// while(__HAL_UART_GET_FLAG(&UART1_Handler,UART_FLAG_TC)!=SET); //等待发送结束
}
#endif
stm32g4xx_it.c
#include "usart.h"
/**
* @brief This function handles USART2 global interrupt / USART2 wake-up interrupt through EXTI line 26.
*/
void USART2_IRQHandler(void)
{
/* USER CODE BEGIN USART2_IRQn 0 */
u32 timeout2=0;
/* USER CODE END USART2_IRQn 0 */
HAL_UART_IRQHandler(&huart2);
/* USER CODE BEGIN USART2_IRQn 1 */
while(HAL_UART_Receive_IT(&huart2, (u8 *)aRxBuffer2, RXBUFFERSIZE2) != HAL_OK)//一次处理完成之后,重新开启中断并设置RxXferCount为1
{
timeout2++; //超时处理
if(timeout2>HAL_MAX_DELAY)
break;
}
/* USER CODE END USART2_IRQn 1 */
}
/**
* @brief This function handles USART3 global interrupt / USART3 wake-up interrupt through EXTI line 28.
*/
void USART3_IRQHandler(void)
{
/* USER CODE BEGIN USART3_IRQn 0 */
u32 timeout3=0;
/* USER CODE END USART3_IRQn 0 */
HAL_UART_IRQHandler(&huart3);
/* USER CODE BEGIN USART3_IRQn 1 */
while(HAL_UART_Receive_IT(&huart3, (u8 *)aRxBuffer3, RXBUFFERSIZE3) != HAL_OK)//一次处理完成之后,重新开启中断并设置RxXferCount为1
{
timeout3++; //超时处理
if(timeout3>HAL_MAX_DELAY)
break;
}
/* USER CODE END USART3_IRQn 1 */
}
usart.h文件
//////////////////////////// 串口3 ///////////////////////////////////////
#define RXBUFFERSIZE3 1 //缓存大小
extern u8 aRxBuffer3[RXBUFFERSIZE3]; //HAL库USART接收Buffer
#define USART3_REC_LEN 200 //定义最大接收字节数 200
#define USART3_SEN_LEN 200
extern u8 USART3_RX_BUF[USART3_REC_LEN]; //接收缓冲,最大USART_REC_LEN个字节.末字节为换行符
extern u8 USART3_TX_BUF[USART3_SEN_LEN]; //发送缓冲,最大USART_SEN_LEN个字节.
extern u16 USART3_RX_STA; //接收状态标记
//////////////////////////// 串口2 ///////////////////////////////////////
#define RXBUFFERSIZE2 1 //缓存大小
extern u8 aRxBuffer2[RXBUFFERSIZE2]; //HAL库USART接收Buffer
#define USART2_REC_LEN 200 //定义最大接收字节数 200
#define USART2_SEN_LEN 200
extern u8 USART2_RX_BUF[USART2_REC_LEN]; //接收缓冲,最大USART_REC_LEN个字节.末字节为换行符
extern u8 USART2_TX_BUF[USART2_SEN_LEN]; //发送缓冲,最大USART_SEN_LEN个字节.
extern u16 USART2_RX_STA; //接收状态标记
#define UART4_PRINTF 1 //printf重写
#define USART3_PRINTF 1 //printf重写
#define USART2_PRINTF 1 //printf重写
#define USART1_PRINTF 0 //printf重写
void u4_printf(char* fmt,...);
void u3_printf(char* fmt,...);
void u2_printf(char* fmt,...);
void u1_printf(char* fmt,...);
usart.c
/* USER CODE BEGIN 0 */
u8 USART2_RX_BUF[USART2_REC_LEN]; //接收缓冲,最大USART_REC_LEN个字节.
u8 USART2_TX_BUF[USART2_SEN_LEN]; //接收缓冲,最大USART_REC_LEN个字节.
u8 USART3_RX_BUF[USART3_REC_LEN]; //接收缓冲,最大USART_REC_LEN个字节.
u8 USART3_TX_BUF[USART3_SEN_LEN]; //接收缓冲,最大USART_REC_LEN个字节.
//接收状态
//bit15, 接收完成标志
//bit14, 接收到0x0d
//bit13~0, 接收到的有效字节数目
u16 USART2_RX_STA=0; //接收状态标记
u8 aRxBuffer2[RXBUFFERSIZE2];//HAL库使用的串口接收缓冲
u16 USART3_RX_STA=0; //接收状态标记
u8 aRxBuffer3[RXBUFFERSIZE3];//HAL库使用的串口接收缓冲
/* USART2 init function */
void MX_USART2_UART_Init(void)
{
/* USER CODE BEGIN USART2_Init 0 */
/* USER CODE END USART2_Init 0 */
/* USER CODE BEGIN USART2_Init 1 */
/* USER CODE END USART2_Init 1 */
huart2.Instance = USART2;
huart2.Init.BaudRate = 115200;
huart2.Init.WordLength = UART_WORDLENGTH_8B;
huart2.Init.StopBits = UART_STOPBITS_1;
huart2.Init.Parity = UART_PARITY_NONE;
huart2.Init.Mode = UART_MODE_TX_RX;
huart2.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart2.Init.OverSampling = UART_OVERSAMPLING_16;
huart2.Init.OneBitSampling = UART_ONE_BIT_SAMPLE_DISABLE;
huart2.Init.ClockPrescaler = UART_PRESCALER_DIV1;
huart2.AdvancedInit.AdvFeatureInit = UART_ADVFEATURE_NO_INIT;
if (HAL_UART_Init(&huart2) != HAL_OK)
{
Error_Handler();
}
if (HAL_UARTEx_SetTxFifoThreshold(&huart2, UART_TXFIFO_THRESHOLD_1_8) != HAL_OK)
{
Error_Handler();
}
if (HAL_UARTEx_SetRxFifoThreshold(&huart2, UART_RXFIFO_THRESHOLD_1_8) != HAL_OK)
{
Error_Handler();
}
if (HAL_UARTEx_DisableFifoMode(&huart2) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN USART2_Init 2 */
HAL_UART_Receive_IT(&huart2, (u8 *)aRxBuffer2, RXBUFFERSIZE2);
/* USER CODE END USART2_Init 2 */
}
/* USART3 init function */
void MX_USART3_UART_Init(void)
{
/* USER CODE BEGIN USART3_Init 0 */
/* USER CODE END USART3_Init 0 */
/* USER CODE BEGIN USART3_Init 1 */
/* USER CODE END USART3_Init 1 */
huart3.Instance = USART3;
huart3.Init.BaudRate = 115200;
huart3.Init.WordLength = UART_WORDLENGTH_8B;
huart3.Init.StopBits = UART_STOPBITS_1;
huart3.Init.Parity = UART_PARITY_NONE;
huart3.Init.Mode = UART_MODE_TX_RX;
huart3.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart3.Init.OverSampling = UART_OVERSAMPLING_16;
huart3.Init.OneBitSampling = UART_ONE_BIT_SAMPLE_DISABLE;
huart3.Init.ClockPrescaler = UART_PRESCALER_DIV1;
huart3.AdvancedInit.AdvFeatureInit = UART_ADVFEATURE_NO_INIT;
if (HAL_UART_Init(&huart3) != HAL_OK)
{
Error_Handler();
}
if (HAL_UARTEx_SetTxFifoThreshold(&huart3, UART_TXFIFO_THRESHOLD_1_8) != HAL_OK)
{
Error_Handler();
}
if (HAL_UARTEx_SetRxFifoThreshold(&huart3, UART_RXFIFO_THRESHOLD_1_8) != HAL_OK)
{
Error_Handler();
}
if (HAL_UARTEx_DisableFifoMode(&huart3) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN USART3_Init 2 */
HAL_UART_Receive_IT(&huart3, (u8 *)aRxBuffer3, RXBUFFERSIZE3);
/* USER CODE END USART3_Init 2 */
}
void HAL_UART_MspInit(UART_HandleTypeDef* uartHandle)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
RCC_PeriphCLKInitTypeDef PeriphClkInit = {0};
if(uartHandle->Instance==USART2)
{
/* USER CODE BEGIN USART2_MspInit 0 */
/* USER CODE END USART2_MspInit 0 */
/** Initializes the peripherals clocks
*/
PeriphClkInit.PeriphClockSelection = RCC_PERIPHCLK_USART2;
PeriphClkInit.Usart2ClockSelection = RCC_USART2CLKSOURCE_PCLK1;
if (HAL_RCCEx_PeriphCLKConfig(&PeriphClkInit) != HAL_OK)
{
Error_Handler();
}
/* USART2 clock enable */
__HAL_RCC_USART2_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
/**USART2 GPIO Configuration
PA2 ------> USART2_TX
PA3 ------> USART2_RX
*/
GPIO_InitStruct.Pin = GPIO_PIN_2|GPIO_PIN_3;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
GPIO_InitStruct.Alternate = GPIO_AF7_USART2;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
/* USART2 interrupt Init */
HAL_NVIC_SetPriority(USART2_IRQn, 2, 0);
HAL_NVIC_EnableIRQ(USART2_IRQn);
/* USER CODE BEGIN USART2_MspInit 1 */
/* USER CODE END USART2_MspInit 1 */
}
else if(uartHandle->Instance==USART3)
{
/* USER CODE BEGIN USART3_MspInit 0 */
/* USER CODE END USART3_MspInit 0 */
/** Initializes the peripherals clocks
*/
PeriphClkInit.PeriphClockSelection = RCC_PERIPHCLK_USART3;
PeriphClkInit.Usart3ClockSelection = RCC_USART3CLKSOURCE_PCLK1;
if (HAL_RCCEx_PeriphCLKConfig(&PeriphClkInit) != HAL_OK)
{
Error_Handler();
}
/* USART3 clock enable */
__HAL_RCC_USART3_CLK_ENABLE();
__HAL_RCC_GPIOB_CLK_ENABLE();
/**USART3 GPIO Configuration
PB10 ------> USART3_TX
PB11 ------> USART3_RX
*/
GPIO_InitStruct.Pin = GPIO_PIN_10|GPIO_PIN_11;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
GPIO_InitStruct.Alternate = GPIO_AF7_USART3;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
/* USART3 interrupt Init */
HAL_NVIC_SetPriority(USART3_IRQn, 3, 0);
HAL_NVIC_EnableIRQ(USART3_IRQn);
/* USER CODE BEGIN USART3_MspInit 1 */
/* USER CODE END USART3_MspInit 1 */
}
}
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
if(huart->Instance==USART2)//如果是串口2
{
if((USART2_RX_STA&0x8000)==0)//接收未完成
{
if(USART2_RX_STA&0x4000)//接收到了0x0d
{
if(aRxBuffer2[0]!=0x0a)USART2_RX_STA=0;//接收错误,重新开始
else USART2_RX_STA|=0x8000; //接收完成了
}
else //还没收到0X0D
{
if(aRxBuffer2[0]==0x0d)USART2_RX_STA|=0x4000;
else
{
USART2_RX_BUF[USART2_RX_STA&0X3FFF]=aRxBuffer2[0] ;
USART2_RX_STA++;
if(USART2_RX_STA>(USART2_REC_LEN-1))USART2_RX_STA=0;//接收数据错误,重新开始接收
}
}
}
}
else if(huart->Instance==USART3)//如果是串口3
{
if((USART3_RX_STA&0x8000)==0)//接收未完成
{
if(USART3_RX_STA&0x4000)//接收到了0x0d
{
if(aRxBuffer3[0]!=0x0a)USART3_RX_STA=0;//接收错误,重新开始
else USART3_RX_STA|=0x8000; //接收完成了
}
else //还没收到0X0D
{
if(aRxBuffer3[0]==0x0d)USART3_RX_STA|=0x4000;
else
{
USART3_RX_BUF[USART3_RX_STA&0X3FFF]=aRxBuffer3[0] ;
USART3_RX_STA++;
if(USART3_RX_STA>(USART3_REC_LEN-1))USART3_RX_STA=0;//接收数据错误,重新开始接收
}
}
}
}
}
本文来自博客园,作者:登云上人间,转载请注明原文链接:https://www.cnblogs.com/lj15941314/p/usart_code.html

 浙公网安备 33010602011771号
浙公网安备 33010602011771号