【linux】驱动-14-异步通知
前言
14. 异步通知
本章内容为驱动基石之一。
驱动只提供功能,不提供策略。
阻塞与非阻塞是 APP 询问 驱动设备。
异步通知是 驱动设备 主动通知 APP。
原文:https://www.cnblogs.com/lizhuming/p/14918049.html
14.1 异步通知的一些概念
异步通知:一旦设备就绪,则主动通知APP,这样APP就不用轮询查询设备状态了。
异步IO:APP 发起 IO 请求后,立即返回。然后再查询 IO 完成情况,或者 IO 完成后被调回。这个过程叫做 异步IO。
14.2 Linux 信号
可以使用 信号 来进行进程间通信(IPC)。
Linux信号表:
- 路径参考:include\uapi\asm-generic\signal.h
| 信号 | 值 | 说明 |
|---|---|---|
| SIGHUP | 1 | 挂起 |
| SIGINT | 2 | 中断中断 |
| SIGQUIT | 3 | 终端退出 |
| SIGILL | 4 | 无效命令 |
| SIGTRAP | 5 | 跟踪陷阱 |
| SIGABRT | 6 | 异常终止信号,和 SIGIOT 同义 |
| SIGIOT | 6 | IOT陷阱,和 SIGABRT 同义 |
| SIGBUS | 7 | BUS错误 |
| SIGFPE | 8 | 浮点异常 |
| SIGKILL | 9 | 强制终止 |
| SIGUSR1 | 10 | 用户自定义信号1 |
| SIGSEGV | 11 | 无效的内存段处理 |
| SIGUSR2 | 12 | 用户自定义信号2 |
| SIGPIPE | 13 | 半关闭管道的写操作 |
| SIGALRM | 14 | 计时器到期 |
| SIGTERM | 15 | 终止 |
| SIGSTKFLT | 16 | 堆栈错误 |
| SIGCHLD | 17 | 子进程已经停止或退出 |
| SIGCONT | 18 | 如果停止了,继续执行 |
| SIGSTOP | 19 | 停止执行 |
| SIGTSTP | 20 | 终端停止信号 |
| SIGTTIN | 21 | 后台进程需要从终端读取输入 |
| SIGTTOU | 22 | 后台进程需要从终端写出 |
| SIGURG | 23 | 紧急的套接字事件 |
| SIGXCPU | 24 | 超额使用CPU分配的时间 |
| SIGXFSZ | 25 | 文件尺寸超额 |
| SIGVTALRM | 26 | 虚拟时钟信号 |
| SIGPROF | 27 | 时钟信号描述 |
| SIGWINCH | 28 | 出口尺寸变化 |
| SIGIO | 29 | I/O |
| SIGPOLL | SIGIO | I/O |
除了 SIGSTOP 和 SIGKILL 两个信号外,进程能够忽略或捕获其它所有信号。
一个信号被捕获的意思是当一个信号到达时有相应代码处理它。
如果一个信号没有被这进程所捕获,内核将采取默认行为处理。
14.3 信号接收
14.4 使用流程
14.4.1 参考流程图
流程图参考韦东山:
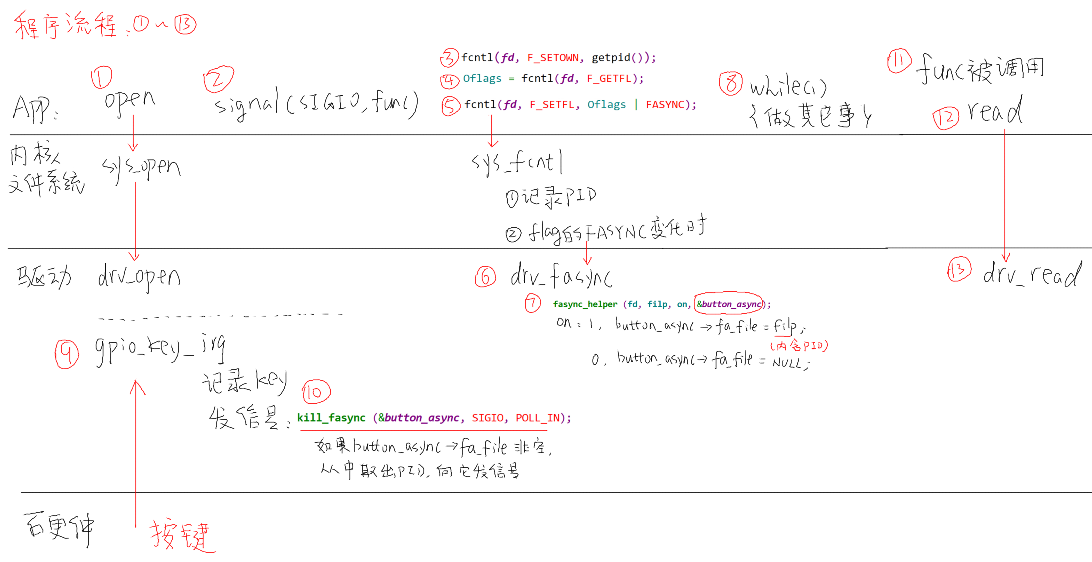
14.4.2 分析&编程步骤
分析中的细节部分会在后本节后面说明
分析:
-
②:绑定信号与回调函数。使用
sighandler_t signal(int signum, sighandler_t handler)。 -
③:把 APP PID 告诉内核。同时,该 PID 会保存到该驱动的内核文件 file 结构体中。
-
④:读取该驱动程序文件的 Flag。
-
⑤:设置 Flag 里面的 FASYNC 位为 1。当 FASYNC 位发生变化时,该驱动会调用驱动操作
drv_fasync函数。 -
⑥:驱动开发者实现的函数。主要是调用 fasync_helper 函数。
-
⑦:调用 fasync_helper() 函数,主要是把 驱动程序内核文件 file 结构体绑定到 button_async->fa_file 中。而 file 包含了 APP 的 PID。所以发送信号时,只需要使用 button_async 作为参数即可。
-
⑩:发送信号给对应的 APP。参数为 button_async。
-
注:button_async 结构体由驱动开发者创建,维护。
APP 信号编程步骤:
- ①:编写信号回调函数。
- ②:绑定信号与回调函数。
- ③:打开驱动。
- ④:获取 PID ,告知内核。
- ⑤:获取进程状态值。
- ⑥:当前状态值添加异步功能,触发调用驱动异步处理函数。
KERNEL 信号编程步骤:
- ①:定义异步结构体。
- ②:实现异步操作函数,并把该函数填充到设备内核驱动操作结构体中。
- 该函数内容主要调用 fasync_helper() 函数,初始化异步结构体。(把 file ,内核PID,交给异步结构体)
- ③:发送信号。
14.4.3 使用函数说明
14.4.3.1 相关结构体及参考模型
APP 模型 截段:
......
/* 设置信号 SIGIO 的处理函数 */
signal(SIGIO, sigio_signal_func);
fcntl(fd, F_SETOWN, getpid()); /* 将当前进程的进程号告诉给内核 */
flags = fcntl(fd, F_GETFD); /* 获取当前的进程状态 */
fcntl(fd, F_SETFL, flags | FASYNC); /* 设置进程启用异步通知功能。会调用驱动中的 drv_fasync 函数 */
......
fasync_struct:
- (在内核源码中,目前没有去找内核文档该结构体内容的相关信息)
struct fasync_struct {
rwlock_t fa_lock;
int magic;
int fa_fd;
struct fasync_struct *fa_next; /* singly linked list */
struct file *fa_file;
struct rcu_head fa_rcu;
};
14.4.3.2 signal 函数
APP 使用。
函数原型:sighandler_t signal(int signum, sighandler_t handler) :
- 功能:绑定信号与回调函数。
- signum:信号类型。除 SIGKILL 和 SIGSTOP 外的任何一种信号。
- handler:该参数有三种类型。
- ①:SIG_IGN 类型。表示忽略该信号。
- ②:SIG_DFL 类型。表示恢复对信号的系统默认处理。
- ③:sighandler_t 类型的函数指针。即是回调函数。
typedef void (*sighandler_t)(int);。
- 注:APP 收到信号执行回调函数时,signum 参数会被传到回调函数的形参传递给回调函数。即是回调函数的形参就是信号类型。
14.4.3.3 kill_fasync 函数
KERNEL 使用。
函数原型:void kill_fasync(struct fasync_struct **fp, int sig, int band) :
- 功能:发送信号给 fp 参数绑定的进程。(by PID)
- 参考路径:linux-5.12.8\fs\fcntl.c
- fp:需要操作的 fasync_struct。
- sig:信号类型。
- band:可读时设置为 POLL_IN;可写时设置为 POLL_OUT。当然该参数还可以填
POLL_MSG。以上三个值在应用层接收时,si_code 分别为 0x01、0x02、0x03。


· go语言实现终端里的倒计时
· 如何编写易于单元测试的代码
· 10年+ .NET Coder 心语,封装的思维:从隐藏、稳定开始理解其本质意义
· .NET Core 中如何实现缓存的预热?
· 从 HTTP 原因短语缺失研究 HTTP/2 和 HTTP/3 的设计差异
· 分享一个免费、快速、无限量使用的满血 DeepSeek R1 模型,支持深度思考和联网搜索!
· 使用C#创建一个MCP客户端
· ollama系列1:轻松3步本地部署deepseek,普通电脑可用
· 基于 Docker 搭建 FRP 内网穿透开源项目(很简单哒)
· 按钮权限的设计及实现