

FOC矢量控制
FOC(Field Oriented Control,磁场定向控制)是控制三相交流电机(如直线电机和旋转电机)的一种常用矢量控制方法。它通过将三相电机的定子电流转化为与转子磁场对齐的两个独立分量:磁通分量和转矩分量,从而能够精确控制电机的磁场和转矩,达到优化电机性能的目的。
FOC的关键步骤:
- 电流采样:测量电机的三相定子电流(通常是IA、IB、IC)。
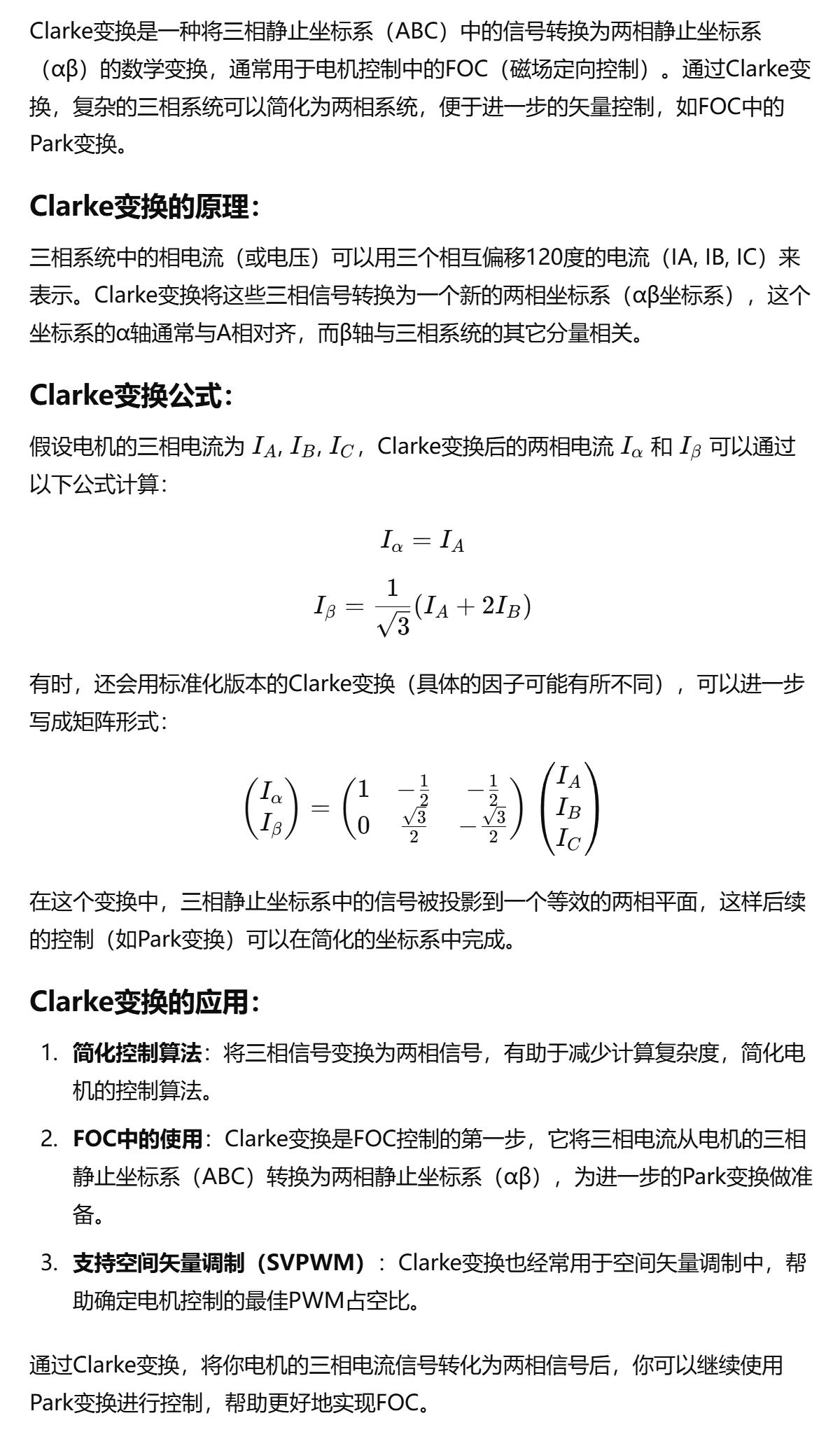
- 坐标变换(Clarke变换):将三相静止坐标系(ABC)中的电流信号转换为两相静止坐标系(αβ),这样便于处理。
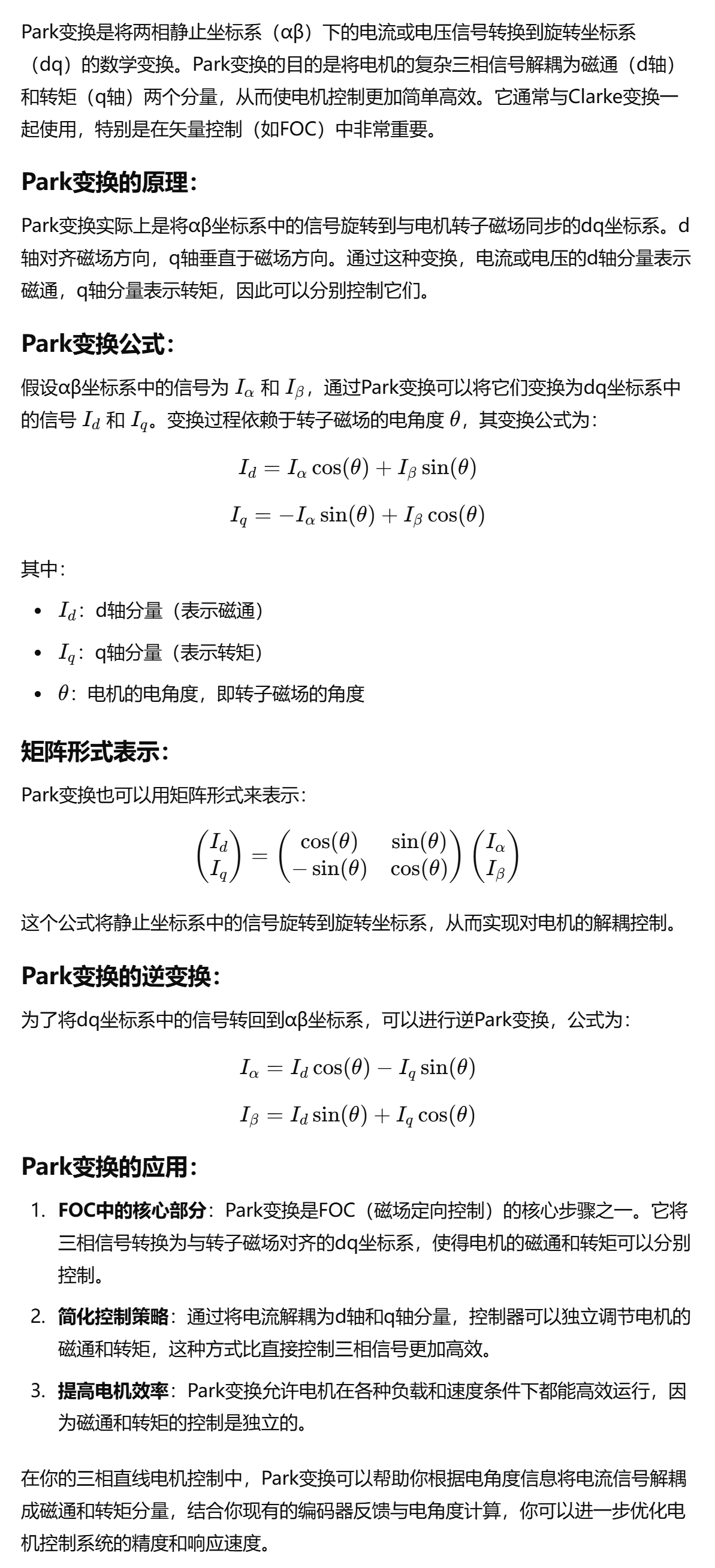
- Park变换:将两相静止坐标系(αβ)中的电流信号转换为两相旋转坐标系(dq),其中d轴分量与转子磁场方向对齐,q轴分量用于控制转矩。
- PI控制器:对d轴和q轴的电流进行PI控制,使得d轴电流保持为0(即无功率消耗在磁通控制上),q轴电流用来控制电机的转矩。
- 逆Park变换:将经过PI控制后的dq轴电压分量转换回αβ坐标系。
- 逆Clarke变换:将αβ坐标系中的电压信号转换回三相静止坐标系(ABC),以生成三相的PWM控制信号。
- PWM调制:将计算出的三相电压信号通过PWM调制送入逆变器,从而驱动电机。
FOC的优势:
- 精确控制:相比传统的定频控制,FOC能够精确地控制电机的转矩和磁通,尤其在低速和高动态响应下表现优异。
- 高效运行:FOC通过解耦磁通和转矩分量,使得电机在不同负载条件下能够高效运行,减少了能量损失。
- 平滑运行:FOC控制方式能实现电机平滑运行,减少电流和转矩的脉动。
在你设计的三相直线电机中,FOC矢量控制可以帮助你更高效地控制电机位置、速度和转矩,结合你现有的编码器反馈、PWM控制以及位置转电角度的算法,你可以通过FOC实现更精确的电机控制。
FOC代码示例


#include <stdio.h> #include <math.h> #include <unistd.h> // For sleep function (in seconds) // 电机参数 #define PI 3.14159265358979323846 #define MAX_CURRENT 1000 // 最大q轴电流(假设单位为mA) // 假设函数接口 int Get_Position(); // 获取电机位置 void Get_Current_ABC(int *I_A, int *I_B, int *I_C); // 获取三相电流 double Get_Electrical_Angle(); // 获取电角度(单位:弧度) void Set_PWM_ABC(int PWM_A, int PWM_B, int PWM_C); // 设置三相PWM // Clarke变换:将三相电流转换为αβ坐标系 void Clarke_Transform(int I_A, int I_B, int I_C, double *I_alpha, double *I_beta) { *I_alpha = I_A; *I_beta = (I_A + 2 * I_B) / sqrt(3); } // Park变换:将αβ坐标系转换为dq旋转坐标系 void Park_Transform(double I_alpha, double I_beta, double theta, double *I_d, double *I_q) { *I_d = I_alpha * cos(theta) + I_beta * sin(theta); *I_q = -I_alpha * sin(theta) + I_beta * cos(theta); } // 逆Park变换:将dq坐标系转换回αβ坐标系 void Inverse_Park_Transform(double V_d, double V_q, double theta, double *V_alpha, double *V_beta) { *V_alpha = V_d * cos(theta) - V_q * sin(theta); *V_beta = V_d * sin(theta) + V_q * cos(theta); } // 逆Clarke变换:将αβ坐标系转换回三相电压 void Inverse_Clarke_Transform(double V_alpha, double V_beta, int *PWM_A, int *PWM_B, int *PWM_C) { *PWM_A = (int)V_alpha; *PWM_B = (int)(-0.5 * V_alpha + sqrt(3)/2 * V_beta); *PWM_C = (int)(-0.5 * V_alpha - sqrt(3)/2 * V_beta); } // 简单的PI控制器 double PI_Controller(double error, double *integral, double Kp, double Ki, double dt) { *integral += error * dt; return Kp * error + Ki * (*integral); } // FOC主控制函数:移动到目标位置 void FOC_Control(int target_position, double max_current, double Kp, double Ki) { int I_A, I_B, I_C; double I_alpha, I_beta, I_d, I_q; double V_d = 0, V_q = 0; double theta; // 电角度 int current_position; double position_error; double integral_d = 0, integral_q = 0; double dt = 0.001; // 控制周期,1ms int PWM_A, PWM_B, PWM_C; while (1) { // 获取当前位置并计算位置误差 current_position = Get_Position(); position_error = target_position - current_position; // 如果到达目标位置,停止控制 if (fabs(position_error) < 10) { Set_PWM_ABC(0, 0, 0); // 停止电机 break; } // 获取电流反馈和电角度 Get_Current_ABC(&I_A, &I_B, &I_C); theta = Get_Electrical_Angle(); // Clarke变换:将三相电流转换为αβ坐标系 Clarke_Transform(I_A, I_B, I_C, &I_alpha, &I_beta); // Park变换:将αβ电流转换为dq电流 Park_Transform(I_alpha, I_beta, theta, &I_d, &I_q); // d轴(磁通)电流控制:目标为0,保持恒定磁通 V_d = PI_Controller(0 - I_d, &integral_d, Kp, Ki, dt); // q轴(转矩)电流控制:根据位置误差设置目标转矩电流 double Iq_ref = PI_Controller(position_error, &integral_q, Kp, Ki, dt); if (fabs(Iq_ref) > max_current) { Iq_ref = (Iq_ref > 0) ? max_current : -max_current; } V_q = PI_Controller(Iq_ref - I_q, &integral_q, Kp, Ki, dt); // 逆Park变换:将dq电压转换为αβ电压 double V_alpha, V_beta; Inverse_Park_Transform(V_d, V_q, theta, &V_alpha, &V_beta); // 逆Clarke变换:将αβ电压转换为三相PWM Inverse_Clarke_Transform(V_alpha, V_beta, &PWM_A, &PWM_B, &PWM_C); // 设置PWM,控制电机 Set_PWM_ABC(PWM_A, PWM_B, PWM_C); // 延时,等待下一个控制周期 usleep((int)(dt * 1000000)); } } int main() { int target_position = 100000; // 目标位置,单位为0.1微米 (10毫米) double max_current = MAX_CURRENT; // 最大q轴电流,单位为mA double Kp = 0.5, Ki = 0.1; // PI控制器参数 // 调用FOC控制函数 FOC_Control(target_position, max_current, Kp, Ki); return 0; }

