

1. Three.js中的拾取
1.1. 从模型转到屏幕上的过程说开
由于图形显示的基本单位是三角形,那就先从一个三角形从世界坐标转到屏幕坐标说起,例如三角形abc
乘以模型视图矩阵就进入了视点坐标系,其实就是相机所在的坐标系,如下图:
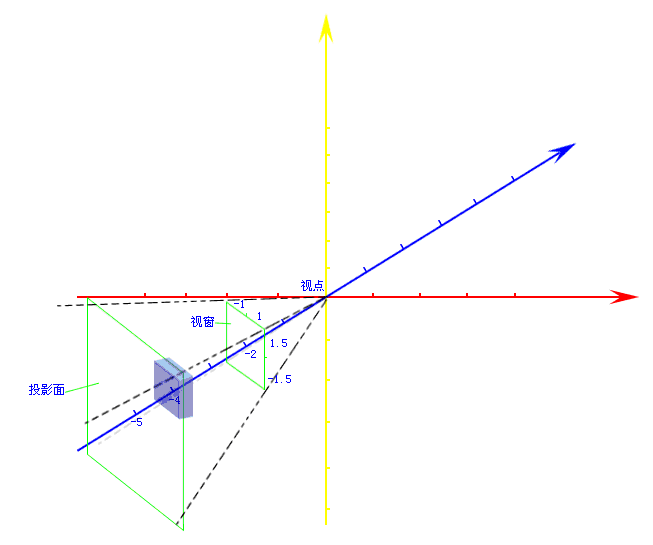
进入视点坐标系后,再乘以投影矩阵,就会变换到一个立方体内,如下图:

这个时候整个三角形就位于中心位于坐标系原点,边长为2的立方体内,在这个立方体内,三角形要计算光照,要裁剪,然后乘以视口矩阵,最后转到屏幕上。

转到屏幕上后,三角形的所有点的Z坐标就是深度坐标,一定在(0, 1)这个区间内,那么哪些点的Z坐标是0呢,在投影坐标系中,一定是投影视景体的前剪切平面上的点,而投影视景体的后剪切平面上的点的Z坐标就是1。
1.2. 思路来了
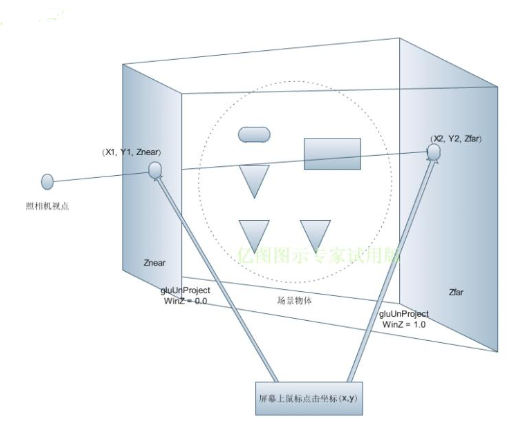
根据以上三角形转换到屏幕坐标上的过程可以分析出,鼠标在屏幕上点击的时候,可以得到二维坐标p(x, y),再加上深度坐标的范围(0, 1), 就可以形成两个三位坐标A(x, y, 0), B(x, y, 1), 由于它们的Z轴坐标是0和1,则转变到投影坐标系的话,一定分别是前剪切平面上的点和后剪切平面上的点,也就是说,在投影坐标系中,A点一定在能看见的所有模型的最前面,B点一定在能看见的所有的模型的最后边,假设视口矩阵的逆矩帧,投影矩阵的逆矩阵,模型视图矩阵的逆矩阵为M, N, P,则 P * N * M * A = A1, P * N * M * B = B1, 在世界坐标系中,点A1B1就可以形成一个射线,此射线和模型再求交,就能选中模型。如下图是在视点坐标系中的情形。注意,求交可以在视点坐标系或者世界坐标系计算都可以,但一般会在世界坐标坐标系中计算。
1.3. 拾取的优化,射线和AABB包围盒求交
如果射线和所有的模型求交,显然不是一个好办法,一般情况下会进行一些优化,比如先和模型的包围盒求交,如果和模型的包围盒不相交的话,就放过去,否则就接着往下进行,和模型的所有三角面片求交。
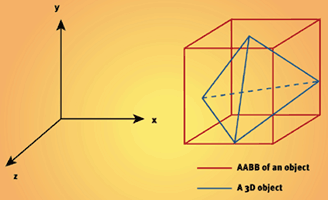
那么什么是包围盒呢?在计算机图形学与计算几何领域,一组物体的包围体就是将物体组合完全包容起来的一个封闭空间。将复杂物体封装在简单的包围体中,就可以提高几何运算的效率。通常简单的物体比较容易检查相互之间的重叠。其中有一种包围盒叫做AABB, AABB的全称是axis aligned bounding box,就是我们常常提到轴向包围盒,这个盒子的边是平行于x/y/z轴的。 所有的2d和3d物体都是由点组成的,所以只要找出这些物体的最大值点和最小值点,那么就可以使用这两个点表示该物体的AABB包围盒了。
检测碰撞的时候我们只需要检测这些物体的AABB(即他们的最大值点和最小值点)是否相交,就可以判断是否碰撞了。
1.4. 射线和三角形相交
判断射线和包围盒是否求交后,就轮到判断是否和三角形求交了,最先想到的是 首先判断射线是否与三角形所在的平面相交,如果相交,再判断交点是否在三角形内。判断射线是否与平面相交, 判断点是否在三角形内.
1.5. THREE.JS中求交的代码实现
three.js中的一个案例,名字叫webgl_interactive_lines.html,可以选中一根线,并显示一个小球。根据以上的思路,代码注释如下:
//鼠标点击的屏幕坐标转换到视点坐标系
var vector = new THREE.Vector3( mouse.x, mouse.y, 1 ).unproject( camera );
//在视点坐标系中形成射线
raycaster.set( camera.position,vector.sub( camera.position ).normalize() );
//射线和模型求交,选中一系列直线
var intersects = raycaster.intersectObjects( parentTransform.children, true);
if ( intersects.length > 0 ) {
if ( currentIntersected !== undefined )
{
currentIntersected.material.linewidth = 1;
}
//第一个直线
currentIntersected = intersects[ 0 ].object;
currentIntersected.material.linewidth = 5;
//把球设为可见,并且位置移到鼠标点击的屏幕位置
sphereInter.visible = true;
sphereInter.position.copy( intersects[ 0 ].point );
}
欢迎加微信 nuonuodi_1, 交流更多的技术问题


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 从 HTTP 原因短语缺失研究 HTTP/2 和 HTTP/3 的设计差异
· AI与.NET技术实操系列:向量存储与相似性搜索在 .NET 中的实现
· 基于Microsoft.Extensions.AI核心库实现RAG应用
· Linux系列:如何用heaptrack跟踪.NET程序的非托管内存泄露
· 开发者必知的日志记录最佳实践
· TypeScript + Deepseek 打造卜卦网站:技术与玄学的结合
· Manus的开源复刻OpenManus初探
· AI 智能体引爆开源社区「GitHub 热点速览」
· 从HTTP原因短语缺失研究HTTP/2和HTTP/3的设计差异
· 三行代码完成国际化适配,妙~啊~
2010-09-27 opengl累积缓存
2008-09-27 mysql数据库中创建与删除数据表
2008-09-27 The request URL /index.html not fond 问题的解决办法