计算几何基础
计算几何基础
点积和差积
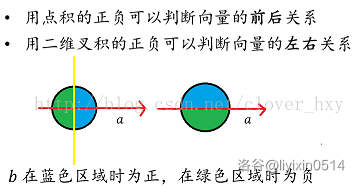
以 \(a\) 的方向为正方向,\(a,b\) 的点积的正负可以判定向量前后(即左右)关系,差积的正负可以判定向量的上下关系。
可以参加下图,左图是点积,右图是差积。
点积
点积有叫做向量积,向量 \(a,b\) 的点积是:
高中数学选修一定义的向量积是 \(|a||b| \cos \theta\),其中 \(\theta\) 是 \(a,b\) 的夹角。几何意义是 \(b\) 的模长乘向量 \(a\) 投影到 \(b\) 的模长。
不难发现点积满足交换律。
差积
\(a,b\) 的差积定义为:
其几何含义为以 \(a,b\) 为邻边的平行四边形的面积(注意当 \(b\) 在 \(a\) 下方时差积为负数)
容易发现差积满足 \(a \cdot b = - b \cdot a\)。
判定点和多边形的关系
简介
射线法。时间复杂度 \(O(n)\)。
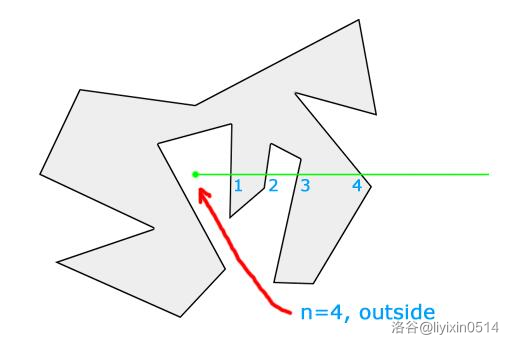
如图,对要判定的点向某个方向(以正右方为例)引一条射线,数射线与多边形交点个数 \(n\),若 \(n\) 是奇数,则点在多边形内,否则点在多边形外。
枚举多边形的每一条边,判定是否存在交点。
正确性证明略。
特殊情况
- 点在多边形上
这种情况就在枚举每一条边的时候判定点是否在边上(包括两端)就可以了。
- 射线经过多边形顶点
这种情况应该算几个交点呢?
参考博客里讲得很清楚。
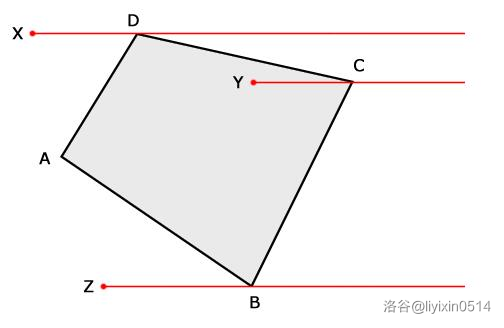
我们把多边形的 \(y\) 左边变成上开下闭的形式。即每个点 \((x,y)\) 变成点 \((x,y-eps)\)。酱紫就不会有射线交到多边形节点上面的情况了,而且可以发现是正确的。
判定点与凸多边形的关系
极点法。
可以 \(O(\log n)\) 求解,\(n\) 为凸包点数。
参考 UVA - 13024 Saint John Festival 凸包+二分
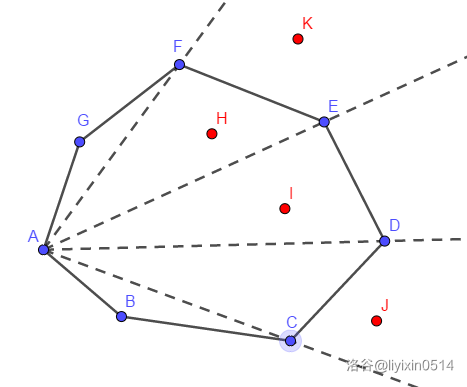
对凸包上的点按照其斜率排序,然后二分找出需要判定的点在哪两个向量之间,然后使用差积判定点是否在三角形内部。
如图,点 \(H,K\) 均在向量 \(AF,AE\) 之间,于是我们计算 \(FH,HE\) 的差积,得到负数,说明 \(H\) 在三角形内部,计算 \(FK,KE\) 的差积,得到正数,说明 \(K\) 在三角形外部。如果点在三角形边 \(FE\) 上,差积将会是 \(0\)。
code
注意凸包的极点(\(s_1\))必须平移至 \((0,0)\)。
bool query(point *s,point x) {//若 x 在凸包 s 内,返回 1,否则返回 0
if(x*s[2]>0 || c[cnt]*x>0 || (x*c[2]==0 && calc(x,{0,0})>calc(c[2],{0,0})) || (c[cnt]*x==0 && calc(x,{0,0})>calc(c[cnt],{0,0}))) return 0;//x 不在任何一个三角形范围内
int k=lower_bound(c+2,c+cnt+1,x,cmp2)-c-1;//找出逆时针方向 x 的前一个向量。
return (x-c[k])*(c[k+1]-x)<=0;//根据差积判定
}
凸包
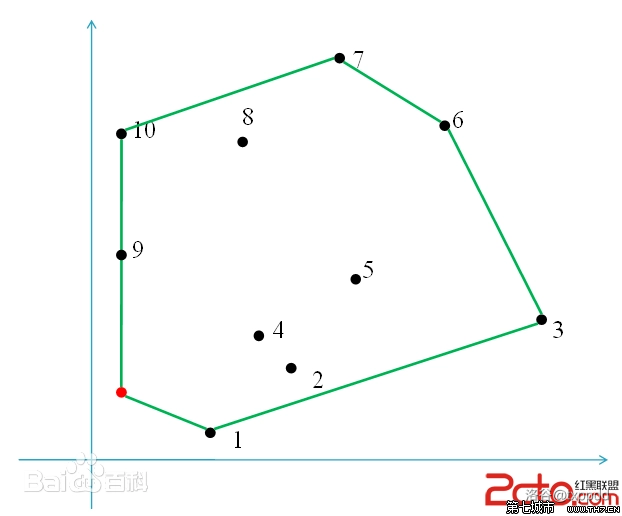
在一个平面直角坐标系中,有 \(n\) 个点,以其中一些点为顶点覆盖了所有点且所有内角都小于 \(180^{\circ}\) 的多边形即为这 \(n\) 个点的凸包。
形象点说,就像在平面上的 \(n\) 根柱子外围套一根皮筋,皮筋就是凸包。
求凸包
Graham扫描法
给定 \(n\) 个点,\(O(n)\) 求凸包。
知乎专栏写得很好,这里简单概述。
容易发现,平面上最左、最上的点一定是在凸包上的,我们把这个点称为极点。我们进行极角排序,即以极点为原点,所有点按照其斜率从小到大排序,将排序后的点依次相连就可以得到一个包含所有点的多边形,但是不一定是凸多边形。
然后我们按照排序的顺序遍历所有点,构成凸包的边是逆时针方向旋转的,可以使用叉乘判断,如果不符合逆时针,就把上一个点 pop 出。
这样就可以求出凸包了。
code
struct point {
int x,y;
point operator - () const { return {-x,-y}; }
point operator + (const point b) const { return {x+b.x, y+b.y}; }
point operator - (const point b) const { return *this + (-b); }
ll operator * (const point b) const { return 1ll*x*b.y - 1ll*y*b.x; }
};
ll chengfang(ll x) { return x*x; }
ll calc(point a,point b) { return chengfang(a.x-b.x)+chengfang(a.y-b.y); }
bool cmp (point a,point b) {
ll x=(a-tmp)*(b-tmp);//差积
if(x==0) return calc(a,tmp) < calc(b,tmp);
return x>0;
}
int st[N<<1];
void get_tubao(point *p, int &n) {
int rt=1;
rep(i,2,n) if(p[i].y<p[rt].y || (p[i].y==p[rt].y&&p[i].x<p[rt].x)) rt=i;//找极点
swap(p[1],p[rt]); tmp=p[1];
sort(p+2,p+n+1,cmp);//极点排序
int top=0;
st[++top]=1, st[++top]=2;
rep(i,3,n) {//使用栈求凸包
while(top>1 && (p[i]-p[st[top]])*(p[st[top]]-p[st[top-1]])>=0) --top;
st[++top]=i;
}
n=top;
rep(i,1,n) p[i]=p[st[i]];
}
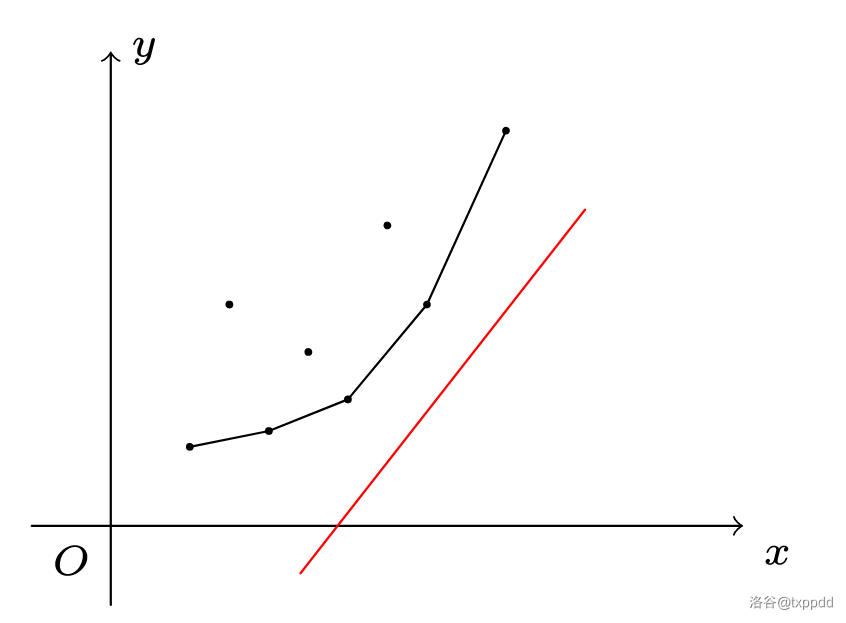
凸壳
不封闭的凸包。
性质
以上图的下凸壳为例:
- 所有点都在凸壳里面(毕竟凸壳是凸包的一部分);
- 凸壳上相邻两点连成的直线斜率随 \(x\) (或 \(y\))的增大单调递增或递减(上图为单调递增)。
维护凸壳
单调队列维护(继续以下凸壳为例)
要求:
新加入的点必须 \(x\) 单调递增。
步骤:
设 \(K(a,b)\) 表示经过点 \(a,b\) 的直线的斜率,即 \(|y_a-y_b|\div |x_a-x_b|\)。设 \(q_j\) 表示凸壳中第 \(j\) 个点的编号。
需要加入点 \((x_i,y_i)\),当前凸壳共有 \(k\) 个点;
若 \(K(q_{k-1},q_k)>=K(q_k,i)\),把 \(q_k\) 从凸壳中踢出;
重复直到 \(K(q_{k-1},q_k)<K(q_k,i)\),将点 \(i\) 加入凸壳;
Code
#include<bits/stdc++.h>
#define sf scanf
#define pf printf
#define il inline
using namespace std;
typedef long long ll;
const int N=1e5+7;
int n;
int x[N],y[N];
int q[N],k;
long double K(int a,int b) { return 1.0*abs(y[a]-y[b])/abs(x[a]-x[b]); }
int main(){
sf("%d",&n);
for(int i=1;i<=n;i++){
sf("%d%d",&x[i],&y[i]);
if(k>1)
while(K(q[k-1],q[k])>=K(q[k],i)&&k>1) k--;
q[++k]=i;
}
}
本文来自博客园,作者:liyixin,转载请注明原文链接:https://www.cnblogs.com/liyixin0514/p/18357736
