
【2020暑假学习】第一次作业:深度学习基础
视频学习
发展:
1956年美国达特茅斯会议:“人工智能” 概念诞生
1957年Rosenblatt感知机 第一次兴起
1968年专家系统
1969年Minsky提出感知机缺陷 第一次低谷
1986年Hinton和Rumelhart提出BP算法 第二次兴起
1989年Yann LeCun 反向传播在手写邮政编码上的应用、CNN
1995年Vapnik提出SVM 第二次低谷
Hinton 神经网络改名为深度学习
BP解决单层网络到单隐层 RBM单隐层到多隐层
吴恩达,使用GPU,提速70倍
2009年李菲菲,做了ImageNet数据集
ImageNet图像分类比赛,2012年转折点,Hinton和研究生,使用CNN+Dropout+RELU,错误率只有15.3%。人工智能技术的突破点,引起工业界注意。
Bengio,发明RELU函数。第一个将神经网络用于自然语言处理中。
代码练习
-
代码最后一行的分号删除时,输出多了一行“(-0.5, 603.5, 405.5, -0.5)”是什么原因,含义是什么?(未解决)
猜测与图本身大小604*406有关。# Plot all channels of a real image plt.subplot(121) #1代表行,2代表列,所以一共有2个图,1代表此时绘制第一个图 plt.imshow(colony[:,:,:]) plt.title('3-channel image') plt.axis('off') #不显示坐标轴 # Plot one channel only plt.subplot(122) plt.imshow(colony[:,:,0]) plt.title('1-channel image') plt.axis('off');
-
opencv的接口使用BGR,matplotlib.pyplot 使用RGB。Google colab解决cv2.imshow()无法使用问题如下:
from google.colab.patches import cv2_imshow BGR_cat = cat[:, :, ::-1] cv2_imshow(BGR_cat)
-
螺旋数据分类 传统训练函数,进来一个batch的数据,计算一次梯度,更新一次网络;梯度累加,每次获取1个batch的数据,计算1次梯度,梯度不清空,不断累加,累加一定次数后,根据累加的梯度更新网络参数。
”一定条件下,batchsize越大训练效果越好,梯度累加则实现了batchsize的变相扩大,如果accumulation_steps为8,则batchsize '变相' 扩大了8倍,是我们这种乞丐实验室解决显存受限的一个不错的trick,使用时需要注意,学习率也要适当放大。“
# 反向传播前把梯度置 0 optimizer.zero_grad() # 反向传播优化 loss.backward() # 更新全部参数 optimizer.step() -
回归分析 使用 ReLU 激活函数,收敛较快;使用 Tanh 激活函数,一开始收敛较慢,但随后也快速收敛达到较好的效果。
Tanh的梯度在饱和区域非常平缓,接近于0,很容易造成vanishing gradient的问题,减缓收敛速度。相反,ReLU的梯度大多数情况下是常数,有助于解决深层网络的收敛问题。https://www.cnblogs.com/alexanderkun/p/6918029.html
-
为什么使用 ReLU 激活函数是分段线性函数,使用 Tanh 激活函数是连续平稳回归?(未解决)
猫狗大战
import copy
criterion = nn.NLLLoss()
lr = 0.001
optimizer_vgg = torch.optim.Adam(model_vgg_new.classifier[6].parameters(), lr=lr, betas=(0.9, 0.999), eps=1e-08, weight_decay=0) #2
def train_model(model,dataloader,loader_valid,size,size_val,epochs=1,optimizer=None):
model.train()
best_acc = 0.0
best_model_wts = copy.deepcopy(model.state_dict())
for epoch in range(epochs):
running_loss = 0.0
running_corrects = 0
count = 0
for inputs,classes in dataloader:
inputs = inputs.to(device)
classes = classes.to(device)
outputs = model(inputs)
loss = criterion(outputs,classes)
optimizer = optimizer
optimizer.zero_grad()
loss.backward()
optimizer.step()
_,preds = torch.max(outputs.data,1)
# statistics
running_loss += loss.data.item()
running_corrects += torch.sum(preds == classes.data)
count += len(inputs)
epoch_loss = running_loss / size
epoch_acc = running_corrects.data.item() / size
print('Train Loss: {:.4f} Acc: {:.4f}'.format(
epoch_loss, epoch_acc))
epoch_val_acc = test_model(model,loader_valid,size=dset_sizes['valid'])
if epoch_val_acc > best_acc:
best_acc = epoch_val_acc
best_model_wts = copy.deepcopy(model.state_dict())
model.load_state_dict(best_model_wts)
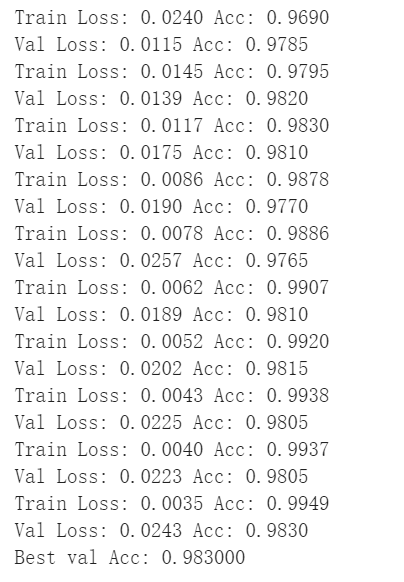
print('Best val Acc: {:4f}'.format(best_acc))
return model
def test_model(model,dataloader,size):
model.eval()
predictions = np.zeros(size)
all_classes = np.zeros(size)
all_proba = np.zeros((size,2))
i = 0
running_loss = 0.0
running_corrects = 0
for inputs,classes in dataloader:
inputs = inputs.to(device)
classes = classes.to(device)
outputs = model(inputs)
loss = criterion(outputs,classes)
_,preds = torch.max(outputs.data,1)
# statistics
running_loss += loss.data.item()
running_corrects += torch.sum(preds == classes.data)
predictions[i:i+len(classes)] = preds.to('cpu').numpy()
all_classes[i:i+len(classes)] = classes.to('cpu').numpy()
all_proba[i:i+len(classes),:] = outputs.data.to('cpu').numpy()
i += len(classes)
epoch_loss = running_loss / size
epoch_acc = running_corrects.data.item() / size
print('Val Loss: {:.4f} Acc: {:.4f}'.format(
epoch_loss, epoch_acc))
return epoch_acc
best_model = train_model(model_vgg_new,loader_train,loader_valid,size=dset_sizes['train'], size_val=dset_sizes['valid'], epochs=10,
optimizer=optimizer_vgg)
将Drive中的文件与Colab关联,挂载到‘/content/drive’下。
from google.colab import drive
drive.mount('/content/drive')
from PIL import Image
def predict(model, img_path):
model.eval()
torch.no_grad()
img = Image.open(img_path)
img_transform = vgg_format(img).unsqueeze(0)
img_transform = img_transform.to(device)
outputs = model(img_transform)
_, predicted = torch.max(outputs,1)
return predicted
import csv
import os
f = open('/content/drive/My Drive/prediction.csv','w',encoding='utf-8')
csv_writer = csv.writer(f)
file_dir = '/content/drive/My Drive/test'
for i in range(2000):
prediction = predict(best_model, file_dir + '/' + str(i) + '.jpg')
print(prediction.item())
csv_writer.writerow([str(i),str(prediction.item())])
f.close()
提交结果如下:

尝试了一下,不知道训练集和预测数据集有没有重合。有错误请指正,纠错中学习。
图片预测结果应按照0、1、2、3、4……的图片名称顺序写入csv文件。第一次遍历文件顺序写入csv文件评审得分为0。
for root, dirs, files in os.walk(file_dir):
for file in files:
prediction = predict(best_model, file_dir + '/' + file)
print(prediction.item())
csv_writer.writerow([file.strip('.jpg'),str(prediction.item())])

