


openpose_rknn推理
推理代码 multi-person-openpose_rknn-cam_coco.py


import cv2 import time import numpy as np from random import randint from rknn.api import RKNN from processing_openpose import extract_parts, draw rknn = RKNN() output = 'result_rknn.png' rknn.load_rknn('./coco_quantization_368_654.rknn') ret = rknn.init_runtime(target='rk1808', target_sub_class='AICS') if ret != 0: print('Init runtime environment failed') exit(ret) print('done') cap = cv2.VideoCapture(0) hasFrame, frame = cap.read() while cv2.waitKey(1) < 0: t = time.time() hasFrame, frame = cap.read() tic = time.time() img_image = cv2.imread('E:\\usb_test\\example\\yolov3\\openpose_keras_18key\\640_360.jpg') if not hasFrame: cv2.waitKey() break body_parts, all_peaks, subset, candidate = extract_parts(img_image,rknn) t4 = time.time() canvas = draw(img_image, all_peaks, subset, candidate) print("t4",time.time()-t4) toc = time.time() print('processing time is %.5f' % (toc - tic)) # cv2.imwrite(output, canvas) # cv2.destroyAllWindows() rknn.release()
processing_openpose.py
import math import numpy as np from scipy.ndimage.filters import gaussian_filter import cv2 import scipy.io as scio import util import time COCO_BODY_PARTS = ['nose', 'neck', 'right_shoulder', ' right_elbow', 'right_wrist', 'left_shoulder', 'left_elbow', 'left_wrist', 'right_hip', 'right_knee', 'right_ankle', 'left_hip', 'left_knee', 'left_ankle', 'right_eye', 'left_eye', 'right_ear', 'left_ear', 'background' ] def extract_parts(input_image,rknn): start_time = time.time() # Body parts location heatmap, one per part (19) heatmap_avg = np.zeros((input_image.shape[0], input_image.shape[1], 19)) paf_avg = np.zeros((input_image.shape[0], input_image.shape[1], 38)) #scale = 1.5333333333333334 #552 984 scale = 1.0222222222222221 #368 656 image_to_test = cv2.resize(input_image, (0, 0), fx=scale, fy=scale, interpolation=cv2.INTER_CUBIC) frame_input = np.transpose(image_to_test, [2, 0, 1]) #print(frame_input.shape) image_to_test_padded, pad = util.pad_right_down_corner(image_to_test, 8, 128) frameWidth = image_to_test.shape[1] frameHeight = image_to_test.shape[0] inHeight = 368 inWidth = int((inHeight / frameHeight) * frameWidth) #print(frame_input.shape) [output] = rknn.inference(inputs=[frame_input], data_format="nchw") print(output.shape) #kk = output.flatten() #st = '' #print(len(kk)) #for x in kk: # st+= ' '+str(x) #with open('t.txt','a') as file_handle: # file_handle.write(st) # 写入 # rknn输出的数组转为1x57x46x46的矩阵 output_blobs = output.reshape(1, 57, 46, 82) scio.savemat("stat1.mat", {'A':output_blobs}) #inpBlob = cv2.dnn.blobFromImage(image_to_test, 1.0 / 255, (inWidth, inHeight), (0, 0, 0), swapRB=False, crop=False) # required shape (1, width, height, channels) #input_img = np.transpose(np.float32(image_to_test_padded[:, :, :, np.newaxis]), (3, 0, 1, 2)) #print(image_to_test_padded.shape) #model.setInput(inpBlob ) #output_blobs = model.forward() output_blobs = output_blobs.transpose([0, 2, 3, 1]) heatmap = output_blobs[0, :, :, 0:19] paf = output_blobs[0, :, :, 19:] print("inference time is ",time.time() - start_time) #print(heatmap.shape) #print(paf.shape) heatmap = cv2.resize(heatmap, (0, 0), fx=8, fy=8, interpolation=cv2.INTER_CUBIC) heatmap = heatmap[:image_to_test_padded.shape[0] - pad[2], :image_to_test_padded.shape[1] - pad[3], :] heatmap = cv2.resize(heatmap, (input_image.shape[1], input_image.shape[0]), interpolation=cv2.INTER_CUBIC) #paf = np.squeeze(output_blobs[0]) # output 0 is PAFs paf = cv2.resize(paf, (0, 0), fx=8, fy=8, interpolation=cv2.INTER_CUBIC) paf = paf[:image_to_test_padded.shape[0] - pad[2], :image_to_test_padded.shape[1] - pad[3], :] paf = cv2.resize(paf, (input_image.shape[1], input_image.shape[0]), interpolation=cv2.INTER_CUBIC) heatmap_avg = heatmap paf_avg = paf all_peaks = [] peak_counter = 0 t0 = time.time() for part in range(18): hmap_ori = heatmap_avg[:, :, part] hmap = gaussian_filter(hmap_ori, sigma=3) # Find the pixel that has maximum value compared to those around it hmap_left = np.zeros(hmap.shape) hmap_left[1:, :] = hmap[:-1, :] hmap_right = np.zeros(hmap.shape) hmap_right[:-1, :] = hmap[1:, :] hmap_up = np.zeros(hmap.shape) hmap_up[:, 1:] = hmap[:, :-1] hmap_down = np.zeros(hmap.shape) hmap_down[:, :-1] = hmap[:, 1:] # reduce needed because there are > 2 arguments peaks_binary = np.logical_and.reduce( (hmap >= hmap_left, hmap >= hmap_right, hmap >= hmap_up, hmap >= hmap_down, hmap > 0.1)) peaks = list(zip(np.nonzero(peaks_binary)[1], np.nonzero(peaks_binary)[0])) # note reverse peaks_with_score = [x + (hmap_ori[x[1], x[0]],) for x in peaks] # add a third element to tuple with score idx = range(peak_counter, peak_counter + len(peaks)) peaks_with_score_and_id = [peaks_with_score[i] + (idx[i],) for i in range(len(idx))] all_peaks.append(peaks_with_score_and_id) peak_counter += len(peaks) connection_all = [] special_k = [] mid_num = 10 #print(len(util.hmapIdx)) print("t0",time.time()-t0) t1 = time.time() for k in range(len(util.hmapIdx)): score_mid_t = time.time() score_mid = paf_avg[:, :, [x - 19 for x in util.hmapIdx[k]]] cand_a = all_peaks[util.limbSeq[k][0] - 1] cand_b = all_peaks[util.limbSeq[k][1] - 1] print("score_mid_t:",time.time()-score_mid_t)#0.14 n_a = len(cand_a) n_b = len(cand_b) # index_a, index_b = util.limbSeq[k] t1_0 =time.time() if n_a != 0 and n_b != 0: connection_candidate = [] print("n_a:%d n_b:%d"%(n_a,n_b)) t1_i =time.time() for i in range(n_a): t1_j =time.time() for j in range(n_b): vec = np.subtract(cand_b[j][:2], cand_a[i][:2]) norm = math.sqrt(vec[0] * vec[0] + vec[1] * vec[1]) # failure case when 2 body parts overlaps if norm == 0: continue vec = np.divide(vec, norm) startend = list(zip(np.linspace(cand_a[i][0], cand_b[j][0], num=mid_num), np.linspace(cand_a[i][1], cand_b[j][1], num=mid_num))) #print("startend:%d"%(len(startend))) vec_x = np.array( [score_mid[int(round(startend[I][1])), int(round(startend[I][0])), 0] for I in range(len(startend))]) vec_y = np.array( [score_mid[int(round(startend[I][1])), int(round(startend[I][0])), 1] for I in range(len(startend))]) score_midpts = np.multiply(vec_x, vec[0]) + np.multiply(vec_y, vec[1]) score_with_dist_prior = sum(score_midpts) / len(score_midpts) + min( 0.5 * input_image.shape[0] / norm - 1, 0) criterion1 = len(np.nonzero(score_midpts > 0.05)[0]) > 0.8 * len( score_midpts) criterion2 = score_with_dist_prior > 0 if criterion1 and criterion2: connection_candidate.append([i, j, score_with_dist_prior, score_with_dist_prior + cand_a[i][2] + cand_b[j][2]]) #print("t1_j:",time.time() - t1_j) #print("t1_i:",time.time() - t1_i) t1_1 = time.time() connection_candidate = sorted(connection_candidate, key=lambda x: x[2], reverse=True) print("t1_1",time.time() - t1_1) connection = np.zeros((0, 5)) for c in range(len(connection_candidate)): i, j, s = connection_candidate[c][0:3] if i not in connection[:, 3] and j not in connection[:, 4]: connection = np.vstack([connection, [cand_a[i][3], cand_b[j][3], s, i, j]]) if len(connection) >= min(n_a, n_b): break connection_all.append(connection) else: special_k.append(k) connection_all.append([]) print("t1_0",time.time()-t1_0) # last number in each row is the total parts number of that person # the second last number in each row is the score of the overall configuration subset = np.empty((0, 20)) candidate = np.array([item for sublist in all_peaks for item in sublist]) print("t1",time.time()-t1) t2 = time.time() for k in range(len(util.hmapIdx)): if k not in special_k: part_as = connection_all[k][:, 0] part_bs = connection_all[k][:, 1] index_a, index_b = np.array(util.limbSeq[k]) - 1 for i in range(len(connection_all[k])): # = 1:size(temp,1) found = 0 subset_idx = [-1, -1] for j in range(len(subset)): # 1:size(subset,1): if subset[j][index_a] == part_as[i] or subset[j][index_b] == part_bs[i]: subset_idx[found] = j found += 1 if found == 1: j = subset_idx[0] if subset[j][index_b] != part_bs[i]: subset[j][index_b] = part_bs[i] subset[j][-1] += 1 subset[j][-2] += candidate[part_bs[i].astype(int), 2] + connection_all[k][i][2] elif found == 2: # if found 2 and disjoint, merge them j1, j2 = subset_idx membership = ((subset[j1] >= 0).astype(int) + (subset[j2] >= 0).astype(int))[:-2] if len(np.nonzero(membership == 2)[0]) == 0: # merge subset[j1][:-2] += (subset[j2][:-2] + 1) subset[j1][-2:] += subset[j2][-2:] subset[j1][-2] += connection_all[k][i][2] subset = np.delete(subset, j2, 0) else: # as like found == 1 subset[j1][index_b] = part_bs[i] subset[j1][-1] += 1 subset[j1][-2] += candidate[part_bs[i].astype(int), 2] + connection_all[k][i][2] # if find no partA in the subset, create a new subset elif not found and k < 17: row = -1 * np.ones(20) row[index_a] = part_as[i] row[index_b] = part_bs[i] row[-1] = 2 row[-2] = sum(candidate[connection_all[k][i, :2].astype(int), 2]) + connection_all[k][i][2] subset = np.vstack([subset, row]) # delete some rows of subset which has few parts occur print("t2",time.time()-t2) t3 = time.time() delete_idx = [] for i in range(len(subset)): if subset[i][-1] < 4 or subset[i][-2] / subset[i][-1] < 0.4: delete_idx.append(i) subset = np.delete(subset, delete_idx, axis=0) points = [] for peak in all_peaks: try: points.append((peak[0][:2])) except IndexError: points.append((None, None)) body_parts = dict(zip(COCO_BODY_PARTS, points)) return body_parts, all_peaks, subset, candidate pirnt("t3",time.time()-t3) def draw(input_image, all_peaks, subset, candidate, resize_fac=1): canvas = input_image.copy() for i in range(18): for j in range(len(all_peaks[i])): a = all_peaks[i][j][0] * resize_fac b = all_peaks[i][j][1] * resize_fac cv2.circle(canvas, (a, b), 2, util.colors[i], thickness=-1) stickwidth = 1 for i in range(17): for s in subset: index = s[np.array(util.limbSeq[i]) - 1] if -1 in index: continue cur_canvas = canvas.copy() y = candidate[index.astype(int), 0] x = candidate[index.astype(int), 1] m_x = np.mean(x) m_y = np.mean(y) length = ((x[0] - x[1]) ** 2 + (y[0] - y[1]) ** 2) ** 0.5 angle = math.degrees(math.atan2(x[0] - x[1], y[0] - y[1])) polygon = cv2.ellipse2Poly((int(m_y * resize_fac), int(m_x * resize_fac)), (int(length * resize_fac / 2), stickwidth), int(angle), 0, 360, 1) cv2.fillConvexPoly(cur_canvas, polygon, util.colors[i]) canvas = cv2.addWeighted(canvas, 0.4, cur_canvas, 0.6, 0) return canvas
util.py
import numpy as np from io import StringIO import PIL.Image from IPython.display import Image, display # find connection in the specified sequence, center 29 is in the position 15 limbSeq = [[2, 3], [2, 6], [3, 4], [4, 5], [6, 7], [7, 8], [2, 9], [9, 10], [10, 11], [2, 12], [12, 13], [13, 14], [2, 1], [1, 15], [15, 17], [1, 16], [16, 18], [3, 17], [6, 18]] # # # the middle joints heatmap correpondence hmapIdx = [[31, 32], [39, 40], [33, 34], [35, 36], [41, 42], [43, 44], [19, 20], [21, 22], [23, 24], [25, 26], [27, 28], [29, 30], [47, 48], [49, 50], [53, 54], [51, 52], [55, 56], [37, 38], [45, 46]] # limbSeq = [[1,2], [1,5], [2,3], [3,4], [5,6], [6,7], # [1,8], [8,9], [9,10], [1,11], [11,12], [12,13], # [1,0], [0,14], [14,16], [0,15], [15,17], # [2,17], [5,16] ] # visualize colors = [[255, 0, 0], [255, 85, 0], [255, 170, 0], [255, 255, 0], [170, 255, 0], [85, 255, 0], [0, 255, 0], [0, 255, 85], [0, 255, 170], [0, 255, 255], [0, 170, 255], [0, 85, 255], [0, 0, 255], [85, 0, 255], [170, 0, 255], [255, 0, 255], [255, 0, 170], [255, 0, 85]] def show_bgr_image(a, fmt='jpeg'): a = np.uint8(np.clip(a, 0, 255)) a[:, :, [0, 2]] = a[:, :, [2, 0]] # for B,G,R order f = StringIO() PIL.Image.fromarray(a).save(f, fmt) display(Image(data=f.getvalue())) def showmap(a, fmt='png'): a = np.uint8(np.clip(a, 0, 255)) f = StringIO() PIL.Image.fromarray(a).save(f, fmt) display(Image(data=f.getvalue())) # def checkparam(param): # octave = param['octave'] # starting_range = param['starting_range'] # ending_range = param['ending_range'] # assert starting_range <= ending_range, 'starting ratio should <= ending ratio' # assert octave >= 1, 'octave should >= 1' # return starting_range, ending_range, octave def get_jet_color(v, vmin, vmax): c = np.zeros(3) if v < vmin: v = vmin if v > vmax: v = vmax dv = vmax - vmin if v < (vmin + 0.125 * dv): c[0] = 256 * (0.5 + (v * 4)) # B: 0.5 ~ 1 elif v < (vmin + 0.375 * dv): c[0] = 255 c[1] = 256 * (v - 0.125) * 4 # G: 0 ~ 1 elif v < (vmin + 0.625 * dv): c[0] = 256 * (-4 * v + 2.5) # B: 1 ~ 0 c[1] = 255 c[2] = 256 * (4 * (v - 0.375)) # R: 0 ~ 1 elif v < (vmin + 0.875 * dv): c[1] = 256 * (-4 * v + 3.5) # G: 1 ~ 0 c[2] = 255 else: c[2] = 256 * (-4 * v + 4.5) # R: 1 ~ 0.5 return c def colorize(gray_img): out = np.zeros(gray_img.shape + (3,)) for y in range(out.shape[0]): for x in range(out.shape[1]): out[y, x, :] = get_jet_color(gray_img[y, x], 0, 1) return out def pad_right_down_corner(img, stride, pad_value): h = img.shape[0] w = img.shape[1] pad = 4 * [None] pad[0] = 0 # up pad[1] = 0 # left pad[2] = 0 if (h % stride == 0) else stride - (h % stride) # down pad[3] = 0 if (w % stride == 0) else stride - (w % stride) # right img_padded = img pad_up = np.tile(img_padded[0:1, :, :] * 0 + pad_value, (pad[0], 1, 1)) img_padded = np.concatenate((pad_up, img_padded), axis=0) pad_left = np.tile(img_padded[:, 0:1, :] * 0 + pad_value, (1, pad[1], 1)) img_padded = np.concatenate((pad_left, img_padded), axis=1) pad_down = np.tile(img_padded[-2:-1, :, :] * 0 + pad_value, (pad[2], 1, 1)) img_padded = np.concatenate((img_padded, pad_down), axis=0) pad_right = np.tile(img_padded[:, -2:-1, :] * 0 + pad_value, (1, pad[3], 1)) img_padded = np.concatenate((img_padded, pad_right), axis=1) return img_padded, pad
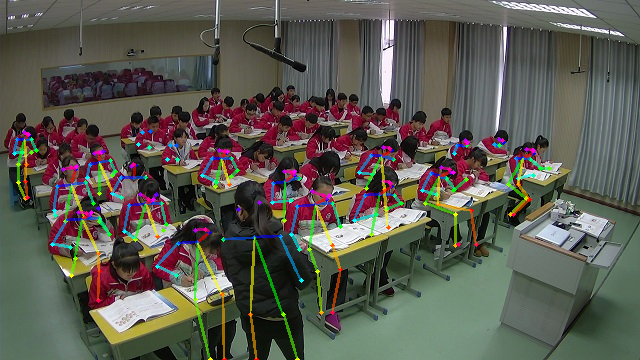
测试效果如下:
检测速度优化:
1.在rknn模型推理时间为370ms,但在处理模型的推理结果时耗时1100ms,猜测可能原因是python代码效率低的原因
2.解决方案:参考如下开源c++代码:https://github.com/dlunion/EasyOpenPose,进行推理结果的处理,时间尽缩短到60ms左右,提高了尽20倍,惊呼C++的效率
3.下定决心学好c++

