21、根据(应用程序)虚拟驱动vivi的使用过程彻底分析摄像头驱动(有ioctrl分析)
videobuf2-core.h中的vb2_buffer,记录了v4l2_buffer ,驱动可以对vb2_buffer的v4l2_buffer进行操控,
vb2_buffer是v4l2框架层的代码,而v4l2_buffer也是用户空间的应用程序,可以读取的一个数据结构。
在reqbuf的时候把每个vb2_buffer会放入vb2_queue中,通过vb2_buffer的index在数组中保存
查看myuvc可以更好的理解队列,有两个队列,qbuf后通过,启动摄像头,select在videobuf的done上休眠,并且把videobuf放入内核维护的队列和驱动本地队列中,30ms的tick时从本地队列取出videobuf,填充数据,并且唤醒videobuf的done上休眠的进程
1、分析xawtv的源码或者使用strace -o xawtv.log xawtv指令可以看该命令在使用过程中详细系统调用
(说明当UVC摄像头接上Hub的时候,hub已经通过端点0和其通信了,并将所有的描述符复制到内核中,并解析后保存在响应的结构体,在这些ioctl中仅与用户控件交换及设置一些属性、格式、分辨率等
uvc_probe
uvc_parse_control
uvc_parse_vendor_control
uvc_parse_standard_control
//根据buf中信息分别解析各个描述符信息,比如format信息解析uvc_parse_streaming
format = kzalloc(size, GFP_KERNEL);//分配format
frame = (struct uvc_frame *)&format[nformats];//分配保存frame
format->frame = frame;//保存frame
streaming->format = format;保存format,在ioctl中会使用到streaming->format
uvc_parse_format//解析format,根据描述符里面的guid转换为字符与uvc_fmts数组比较,找到定义格式的宏,在uvc_driver.c中,这个数组有YUYV、MIPEG等)
)
// 1~7都是在v4l2_open里调用
1. open
2. ioctl(4, VIDIOC_QUERYCAP //查询设备属性,返回的数据保存在v4l2_capability中,有设备名字、驱动名字、驱动版本,设备能否捕获图像,以及应用程序获取图像的方式
// 3~7 都是在get_device_capabilities里调用
3. for()
ioctl(4, VIDIOC_ENUMINPUT // 列举输入源,VIDIOC_ENUMINPUT/VIDIOC_G_INPUT/VIDIOC_S_INPUT不是必需的
4. for()
ioctl(4, VIDIOC_ENUMSTD // 列举标准(制式), 不是必需的
5. for()
ioctl(4, VIDIOC_ENUM_FMT // 获取当前驱动支持的视频格式,列举格式 格式有YUYV、RGB等,在ioctl函数中vidioc_enum_fmt_vid_cap可以看到vivi有多少种格式
//VIDIOC_G_FMT 读取当前驱动的频捕获格式
6. ioctl(4, VIDIOC_G_PARM
7. for()
ioctl(4, VIDIOC_QUERYCTRL // 查询属性(比如说亮度值最小值、最大值、默认值)
// 8~10都是通过v4l2_read_attr来调用的
8. ioctl(4, VIDIOC_G_STD // 获得当前使用的标准(制式), 不是必需的
9. ioctl(4, VIDIOC_G_INPUT //用来查询当前的 input,一个 video 设备 节点可能对应多个视频源
////如果 STD.id 与当前 input 的 input.std 有共同的 bit flag,意味着当前的输入支持这个 standard,这样将所有驱动所支持的 standard 列举一个
10. ioctl(4, VIDIOC_G_CTRL // 获得当前属性, 比如亮度是多少
11. ioctl(4, VIDIOC_TRY_FMT // 试试能否支持某种格式
12. ioctl(4, VIDIOC_S_FMT // 设置摄像头使用某种格式
// 13~16在v4l2_start_streaming
13. ioctl(4, VIDIOC_REQBUFS // 请求系统分配缓冲区
14. for()
ioctl(4, VIDIOC_QUERYBUF // 查询所分配的缓冲区
mmap
15. for ()
ioctl(4, VIDIOC_QBUF // 把缓冲区放入队列
16. ioctl(4, VIDIOC_STREAMON // 启动摄像头
// 17里都是通过v4l2_write_attr来调用的
17. for ()
ioctl(4, VIDIOC_S_CTRL // 设置属性
ioctl(4, VIDIOC_S_INPUT // 设置输入源
ioctl(4, VIDIOC_S_STD // 设置标准(制式), 不是必需的
// v4l2_nextframe > v4l2_waiton
18. v4l2_queue_all
v4l2_waiton
for ()
{
select(5, [4], NULL, NULL, {5, 0}) = 1 (in [4], left {4, 985979})(用来查询有没有数据)
ioctl(4, VIDIOC_DQBUF // de-queue, 把缓冲区从队列中取出
// 处理, 之以已经通过mmap获得了缓冲区的地址, 就可以直接访问数据
ioctl(4, VIDIOC_QBUF // 把缓冲区放入队列
}
xawtv的几大函数:
1. v4l2_open
2. v4l2_read_attr/v4l2_write_attr
3. v4l2_start_streaming
4. v4l2_nextframe/v4l2_waiton
摄像头驱动程序必需的11个ioctl:
// 表示它是一个摄像头设备
.vidioc_querycap = vidioc_querycap,
/* 用于列举、获得、测试、设置摄像头的数据的格式 */
.vidioc_enum_fmt_vid_cap = vidioc_enum_fmt_vid_cap,//列举支持哪些格式
.vidioc_g_fmt_vid_cap = vidioc_g_fmt_vid_cap,//获得当前使用的格式
.vidioc_try_fmt_vid_cap = vidioc_try_fmt_vid_cap,
.vidioc_s_fmt_vid_cap = vidioc_s_fmt_vid_cap,
/* 缓冲区操作: 申请/查询/放入队列/取出队列 */
.vidioc_reqbufs = vidioc_reqbufs,
.vidioc_querybuf = vidioc_querybuf,//查询buf信息,比如地址信息(应用可以用mmap继续映射)
.vidioc_qbuf = vidioc_qbuf,//把缓冲区放入队列, 底层的硬件操作函数将会把数据放入这个队列的缓存 ,参考: uvc_queue_buffer ,参数v4l2_buf是用户空间传进来的,里面有些数据比如index是用来查找驱动分配的buf
.vidioc_dqbuf = vidioc_dqbuf,
// 启动/停止
.vidioc_streamon = vidioc_streamon,
.vidioc_streamoff = vidioc_streamoff,
继续分析数据的获取过程:
1. 请求分配缓冲区: ioctl(4, VIDIOC_REQBUFS // 请求系统分配缓冲区
videobuf_reqbufs(队列, v4l2_requestbuffers) // 队列在open函数用videobuf_queue_vmalloc_init初始化,v4l2_requestbuffers结构体里面有缓冲区个数、内存类型,没有缓冲区大小的信息,videobuf_queue_vmalloc_init的msize参数是指的缓冲区头部大小,即videobuf_buffer的大小,在3.4.2内核中videobuf_buffer改成了vb2_buffer
// 注意:这个IOCTL只是分配缓冲区的头部信息,真正的缓存还没有分配呢
2. 查询映射缓冲区:
ioctl(4, VIDIOC_QUERYBUF // 查询所分配的缓冲区
videobuf_querybuf // 获得缓冲区的数据格式、大小、每一行长度、高度
mmap(参数里有"大小") // 应用程序调用mmap,在这里才分配缓存(应用程序调用mmap的时候就是调用驱动中v4l2_mmap,在v4l2-dev.c中的file_operations)
v4l2_mmap
vivi_mmap(video_device->fops->mmap)
videobuf_mmap_mapper
CALL(q,mmap_mapper,q,vma)//就是调用mmap_mapper函数,在内核中找mmap_mapper发现在videobuf-vmalloc.c中有.mmap_mapper = __videobuf_mmap_mapper
videobuf-vmalloc.c里的__videobuf_mmap_mapper
mem->vmalloc = vmalloc_user(pages); // 在这里才给缓冲区分配空间
3. 把缓冲区放入队列:
ioctl(4, VIDIOC_QBUF // 把缓冲区放入队列
videobuf_qbuf
q->ops->buf_prepare(q, buf, field); // 调用驱动程序提供的函数做些预处理(vivi.c中q->ops = &vivi_video_qops;)
list_add_tail(&buf->stream, &q->stream); // 把缓冲区放入队列的尾部
q->ops->buf_queue(q, buf); // 调用驱动程序提供的"入队列函数",这里是入驱动的队列,在select的时候是操作这个队列里面的buf
4. 启动摄像头
ioctl(4, VIDIOC_STREAMON
videobuf_streamon
q->streaming = 1;
5. 用select查询是否有数据
// 驱动程序里必定有: 产生数据、唤醒进程
v4l2_poll
vdev->fops->poll
vivi_poll
videobuf_poll_stream
// 从队列的头部获得缓冲区,应该就是获得地址,并操作这个buf
buf = list_entry(q->stream.next, struct videobuf_buffer, stream);
// 如果没有数据则休眠
poll_wait(file, &buf->done, wait);//3.4.2的内核是poll_wait(file, &q->done_wq, wait);,在当前目录中找done_wq,发现在vb2_buffer_done中被wakeup,其被vivi_thread_tick调用
谁来产生数据、谁来唤醒它?()
内核线程vivi_thread每30MS执行一次,它调用
vivi_thread_tick
vivi_fillbuff(fh, buf); // 构造数据 虚拟的视频数据
wake_up(&buf->vb.done); // 唤醒进程后,应用测试就会返回了
6. 有数据后从队列里取出缓冲区
// 有那么多缓冲区,APP如何知道哪一个缓冲区有数据?调用VIDIOC_DQBUF
ioctl(4, VIDIOC_DQBUF
vidioc_dqbuf
// 在队列里获得有数据的缓冲区
retval = stream_next_buffer(q, &buf, nonblocking);
// 把它从队列中删掉
list_del(&buf->stream);
// 把这个缓冲区的状态返回给APP
videobuf_status(q, b, buf, q->type);
7. 应用程序根据VIDIOC_DQBUF所得到缓冲区状态,知道是哪一个缓冲区有数据
就去读对应的地址(该地址来自前面的mmap)
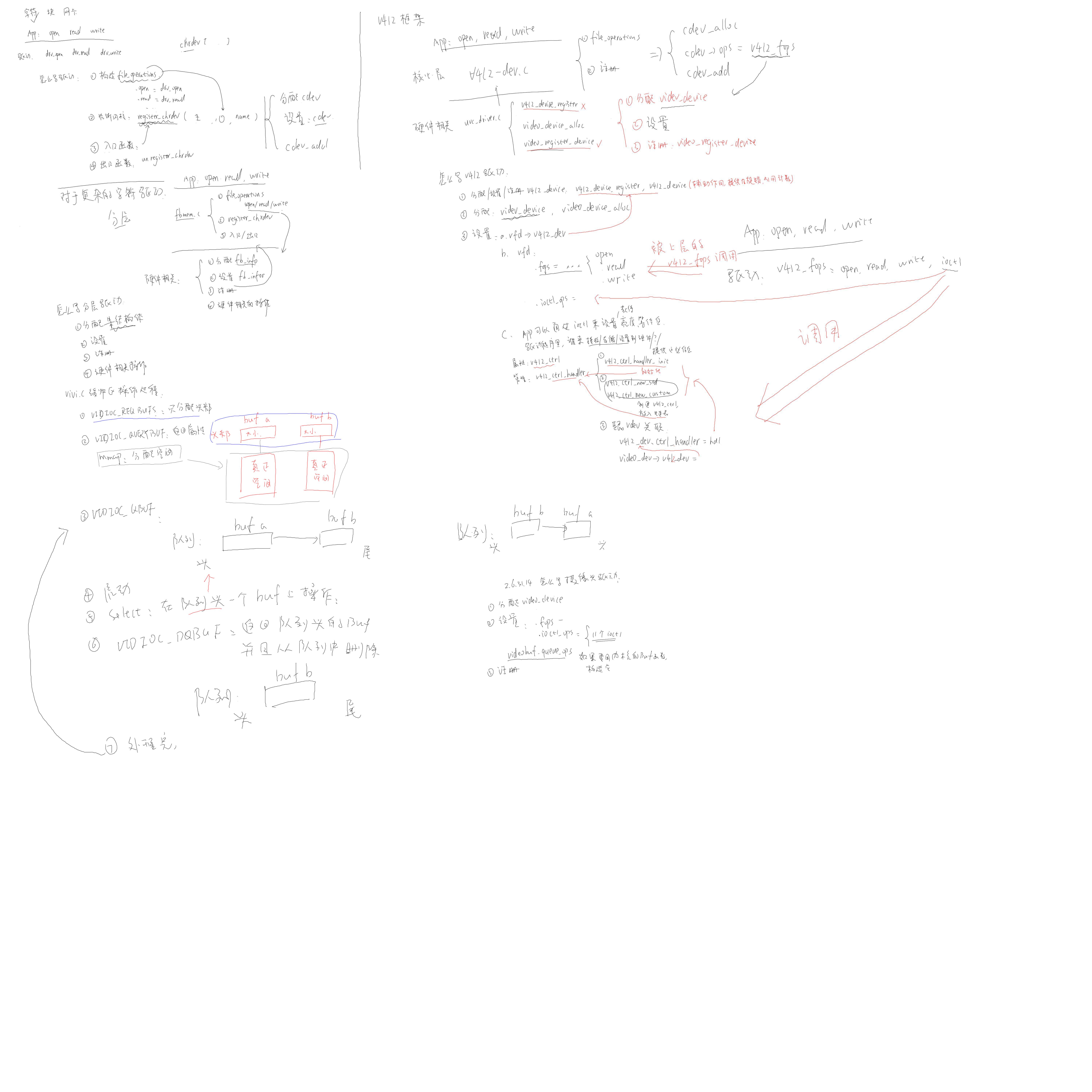
怎么写摄像头驱动程序:
1. 分配video_device:video_device_alloc
2. 设置
.fops
.ioctl_ops (里面需要设置11项)
如果要用内核提供的缓冲区操作函数,还需要构造一个videobuf_queue_ops
3. 注册: video_register_device