

1、异常与中断的概念及处理流程
1 中断的引入
1.1妈妈怎么知道孩子醒了

妈妈怎么知道卧室里小孩醒了?
① 时不时进房间看一下:查询方式
简单,但是累
② 进去房间陪小孩一起睡觉,小孩醒了会吵醒她:休眠-唤醒
不累,但是妈妈干不了活了
③ 妈妈要干很多活,但是可以陪小孩睡一会,定个闹钟:poll方式
要浪费点时间,但是可以继续干活。
妈妈要么是被小孩吵醒,要么是被闹钟吵醒。
④ 妈妈在客厅干活,小孩醒了他会自己走出房门告诉妈妈:异步通知
妈妈、小孩互不耽误。
后面的3种方式,都需要“小孩来中断妈妈”:中断她的睡眠、中断她的工作。
实际上,能“中断”妈妈的事情可多了:
① 远处的猫叫:这可以被忽略
② 门铃、小孩哭声:妈妈的应对措施不一样
③ 身体不舒服:那要赶紧休息
④ 有蜘蛛掉下来了:赶紧跑啊,救命
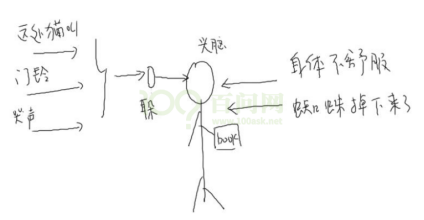
妈妈当前正在看书,被“中断”后她会怎么做?流程如下:
① 妈妈正在看书
② 发生了各种声音
可忽略的远处猫叫
快递员按门铃
卧室中小孩哭了
③ 妈妈怎么办?
a. 先在书中放入书签,合上书
b. 去处理
对于不同的情况,处理方法不同:
对于门铃:开门取快递
对于哭声:照顾小孩
c. 回来继续看书
1.2嵌入系统中也有类似的情况
CPU在运行的过程中,也会被各种“异常”打断。这些“异常”有:
① 指令未定义
② 指令、数据访问有问题
③ SWI(软中断)
④ 快中断
⑤ 中断
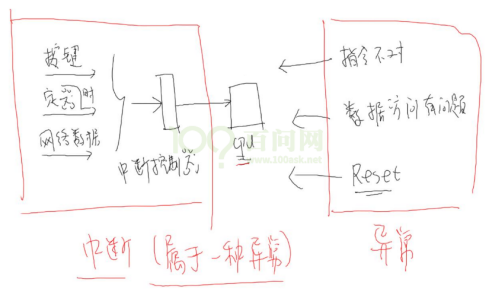
中断也属于一种“异常”,导致中断发生的情况有很多,比如:
① 按键
② 定时器
③ ADC转换完成
④ UART发送完数据、收到数据
⑤ 等等
这些众多的“中断源”,汇集到“中断控制器”,由“中断控制器”选择优先级最高的中断并通知CPU。
2 中断的处理流程
arm对异常(中断)处理过程:
① 初始化:
a. 设置中断源,让它可以产生中断
b. 设置中断控制器(可以屏蔽某个中断,优先级)
c. 设置CPU总开关(使能中断)
② 执行其他程序:正常程序
③ 产生中断:比如按下按键--->中断控制器--->CPU
④ CPU 每执行完一条指令都会检查有无中断/异常产生
⑤ CPU发现有中断/异常产生,开始处理。
对于不同的异常,跳去不同的地址执行程序。
这地址上,只是一条跳转指令,跳去执行某个函数(地址),这个就是异常向量。
③④⑤都是硬件做的。
⑥ 这些函数做什么事情?
软件做的:
a. 保存现场(各种寄存器)
b. 处理异常(中断):
分辨中断源,再调用不同的处理函数
c. 恢复现场
3 异常向量表
u-boot或是Linux内核,都有类似如下的代码:
_start: b reset
ldr pc, _undefined_instruction
ldr pc, _software_interrupt
ldr pc, _prefetch_abort
ldr pc, _data_abort
ldr pc, _not_used
ldr pc, _irq //发生中断时,CPU跳到这个地址执行该指令 **假设地址为0x18**
ldr pc, _fiq
这就是异常向量表,每一条指令对应一种异常。
发生复位时,CPU就去 执行第1条指令:b reset。
发生中断时,CPU就去执行“ldr pc, _irq”这条指令。
这些指令存放的位置是固定的,比如对于ARM9芯片中断向量的地址是0x18。
当发生中断时,CPU就强制跳去执行0x18处的代码,当发生这些异常时,CPU调转到对应的异常向量表表项是硬件决定的,根据异常类型硬件能自己决定执行哪项
在向量表里,一般都是放置一条跳转指令,发生该异常时,CPU就会执行向量表中的跳转指令,去调用更复杂的函数。
比如这里就是执行_irq()函数,在irq函数中保护现场、调用注册的更复杂的处理函数、恢复现场
当然,向量表的位置并不总是从0地址开始,很多芯片可以设置某个vector base寄存器,指定向量表在其他位置,比如设置vector base为0x80000000,指定为DDR的某个地址。但是表中的各个异常向量的偏移地址,是固定的:复位向量偏移地址是0,中断是0x18。
4 参考资料
对于ARM的中断控制器,述语上称之为GIC (Generic Interrupt Controller),到目前已经更新到v4版本了。
各个版本的差别可以看这里:
https://developer.arm.com/ip-products/system-ip/system-controllers/interrupt-controllers
简单地说,GIC v3/v4用于 ARMv8 架构,即64位ARM芯片。
而GIC v2用于ARMv7和其他更低的架构。
以后在驱动大全里讲解中断时,我们再深入分析,到时会涉及单核、多核等知识。


