

ORB_SLAM2之Pangolin的安装与问题处理
前言
本篇博客中,我们主要介绍了在安装ORB_SLAM2所需的第三方库Pangolin的过程中遇到的一些问题及解决方法。
1.Pangolin是什么?
Pangolin是一个用于OpenGL显示/交互以及视频输入的一个轻量级、快速开发库,下面是Pangolin的Github网址:
https://github.com/stevenlovegrove/Pangolin
2.我们为什么要用Pangolin?在哪里可以用到Pangolin?
ORB_SLAM2中需要有Pangolin的支持。
3.安装过程?
按照Github上面的教程走即可,非常简单(https://github.com/stevenlovegrove/Pangolin)。
(1)安装一些必要的库:
Glew:
sudo apt-get install libglew-dev
CMake:
sudo apt-get install cmake
Boost:
sudo apt-get install libboost-dev libboost-thread-dev libboost-filesystem-dev
Python2 / Python3:
sudo apt-get install libpython2.7-dev
(2)在安装完上述依赖后,就可以开始安装Pangolin了,安装过程十分简单:
git clone https://github.com/stevenlovegrove/Pangolin.git cd Pangolin mkdir build cd build cmake -DCPP11_NO_BOOST=1 .. make -j
(3)这时,你可能会遇到如下问题:
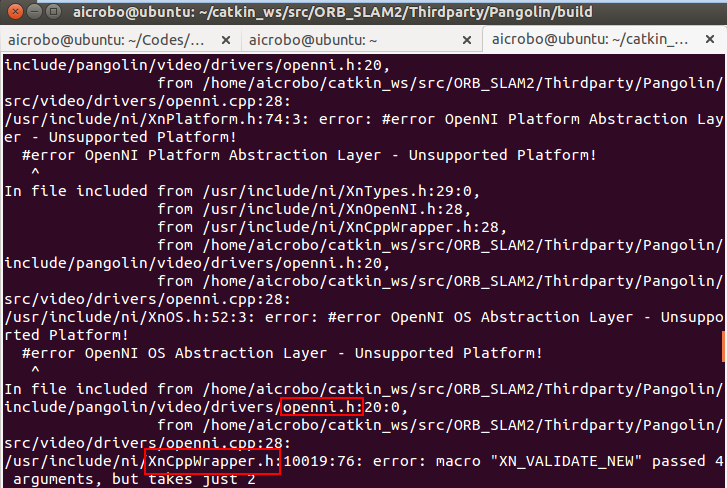
看得很头大是吧?没关系,只要看到错误信息中关键的内容就好了。
提示的错误大部分是跟openni.h和XnCppWrapper.h有关的。
而我们这里编译Pangolin时,并不需要用到OpenNI,可以在编译时将其屏蔽:
cd Pangolin/src
vim CMakeLists.txt (这里选择你自己喜欢的编辑器)
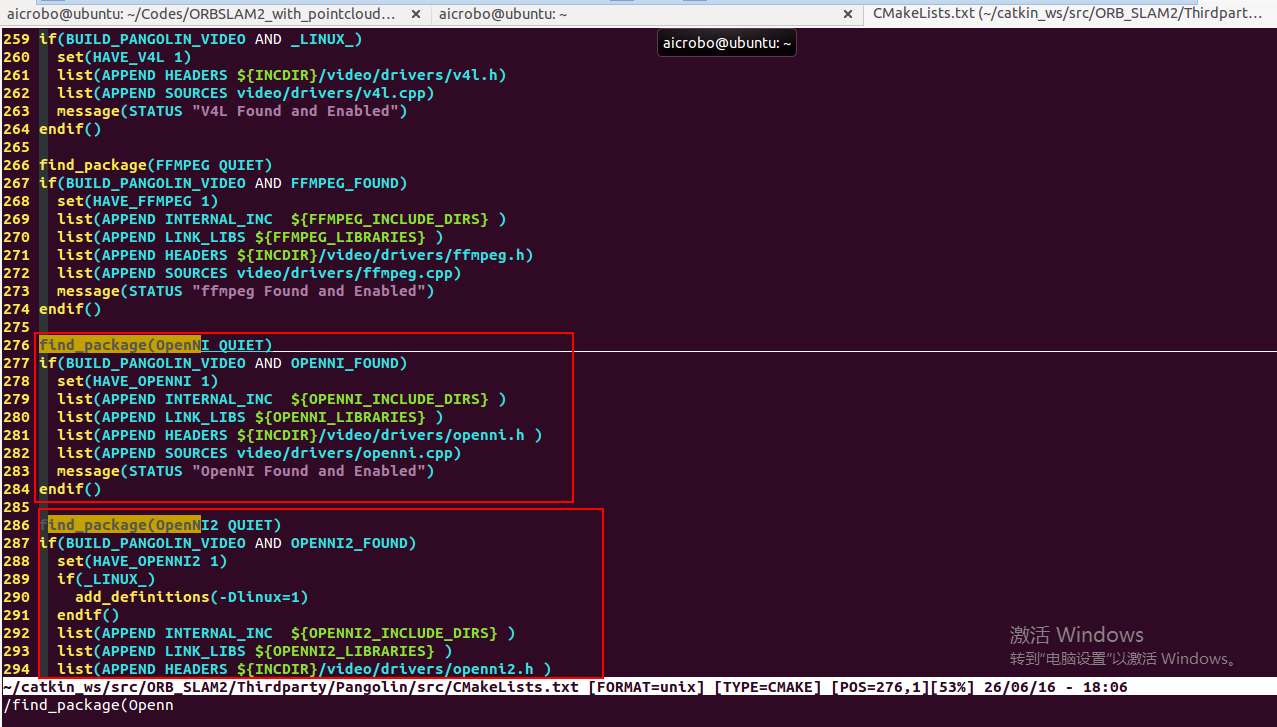
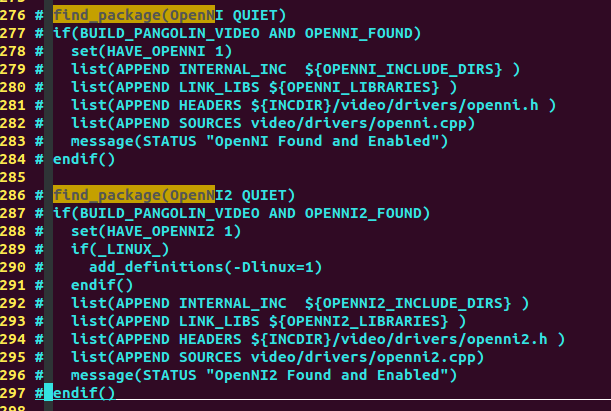
看到这里的OpenNI和OpenNI2的部分了吧,将其全部注释掉即可。
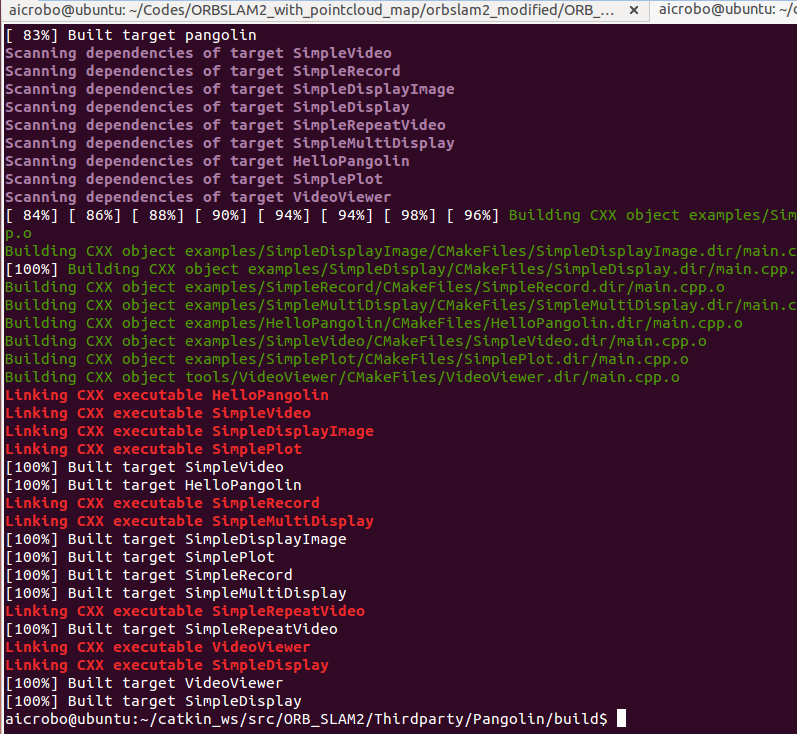
之后,重新编译Pangolin:
make -j
当你看到下面这个画面时,恭喜你,Pangolin已经安装成功了!
posted on 2016-06-26 18:26 Brad_Lucas 阅读(36114) 评论(3) 编辑 收藏 举报


