KITTI数据集
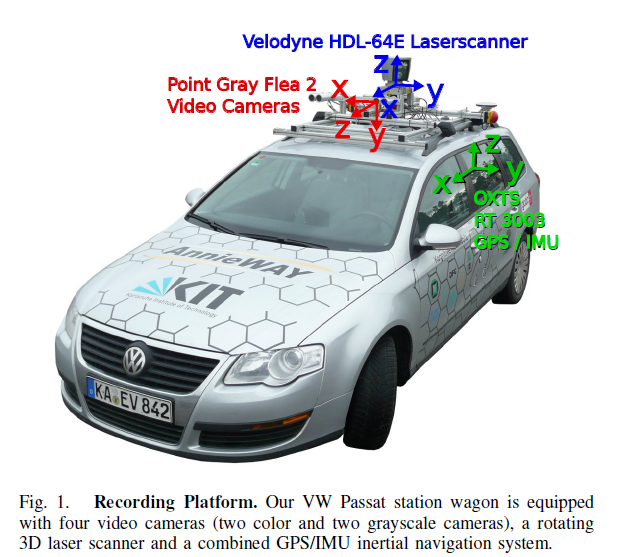
数据采集传感器:
- 彩色和灰度立体相机(x = right, y = down, z = forward);
- 激光雷达(x = forward, y = left, z = up);
- 惯性导航系统(GPS/IMU)x = forward, y = left, z = up。
1、图片
保存为png格式,将天空和汽车引擎裁剪了;并且对图片进行了矫正,矫正后图片依赖提供的校准(calibration)文件
2、激光雷达
保存为二进制浮点数,点云每个点包含(x,y,z)坐标和反射值(r);每一帧大约包含120000个3D坐标和反射值
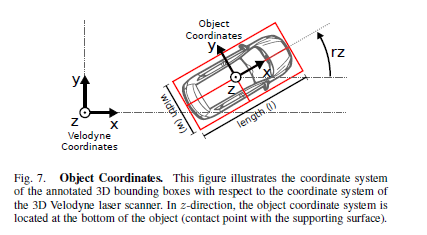
标注
- 提供3D box标注(在激光雷达坐标系下);
- 预定义类别:’Car’, ’Van’, ’Truck’, ’Pedestrian’, ’Person (sitting)’, ’Cyclist’, ’Tram’ and ’Misc’
每个对象被分配一个类别和三维尺寸(高、宽、长)、坐标、方向角
传感器同步:
我们在连续旋转的扫描仪底部安装了一个簧片触点,当面向前方时触发摄像头。这将使动态对象引起的范围和图像观察的差异最小化。
分类:
02 机器学习


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 震惊!C++程序真的从main开始吗?99%的程序员都答错了
· 【硬核科普】Trae如何「偷看」你的代码?零基础破解AI编程运行原理
· 单元测试从入门到精通
· 上周热点回顾(3.3-3.9)
· winform 绘制太阳,地球,月球 运作规律