
牛顿算法及其改进【阻尼牛顿法、修正牛顿法】
牛顿算法
对于优化函数\(f(x)\),\(x=(x_1;x_2;...;x_n)\),二阶连续可导
在\(x_k\)处泰勒展开,取前三项,即对于优化函数二阶拟合
其中\(g_k=\nabla f(x_k)\),为函数梯度;\(G_k=\nabla^2f(x_k)\),为函数的Hesse矩阵
当\(G_k\)正定时,上式存在极小值,使得\(\nabla f(x)=0\)
\(\nabla f(x)=g_k+G_k(x-x_k)=0\)
可得牛顿法迭代公式:
- 可见,对于牛顿法,需要计算二阶偏导数(Hesse矩阵),且Hesse矩阵必须可逆、正定
- 并且,牛顿法对于迭代初始值\(x_0\)也有要求,当\(x_0\)距离最优解\(x*\)足够近时,算法才收敛
阻尼牛顿法
阻尼牛顿法解决了第二个问题,使得算法全局收敛
主要方法是引入线搜索技术,使得算法满足收敛性条件,关于线搜索技术
线搜索
算法:
\(step0:\)
给定迭代初始值\(x_0\),和容许误差\(\epsilon\)
\(step1:\)
计算梯度\(g_k=\nabla f(x_k)\)
if \(||g_k||<\epsilon\),break;输出当前\(x_k\)
else 解方程:
求出迭代方向$d_k$, to step 2
\(step2:\)
利用Armijo准则算法,计算迭代步长\(\alpha_k\)
k=k+1;to step 1
修正的牛顿算法
上面算法有前提条件1(Hesse矩阵正定)
为了扩大算法的适用范围,对算法修正,解决条件1 的强制条件,有两种方法
方法1:
对于阻尼牛顿算法求得的迭代方向\(d_k\),检查是否满足收敛条件:
if 满足
\(d_k=d_k\)
else
\(d_k=-g_k\)
就是牛顿算法和梯度下降算法的混合算法,当牛顿算法求得迭代方向不满足收敛条件,使用负梯度方向为迭代方向
关于为什么不直接使用梯度下降法
可以证明:牛顿算法是二阶收敛,梯度下降线性收敛【牛顿法收敛速度快】
方法2
引进阻尼因子\(\mu_k\),对Hesse矩阵修正,选择适当\(\mu_k\),使得
正定
方法二matlab代码
function [x,val,fun_t] = revise_newton(fun,gfun,hesse,x0,iterate)
%revise_newton - Description
%
% Syntax: [x,val,fun_t] = revise_newton(fun,gfun,hesse,x0)
%
% 修正牛顿法
n=length(x0);maxk=iterate;
rho=0.55;Sigma=0.4;tau=0.0;
k=0;epsilon=1e-5;
fun_t=zeros(1,maxk);
while k<maxk
k=k+1;
fun_t(1,k)=fun(x0);
gk=gfun(x0);
muk=norm(gk)^(1+tau);
Gk=hesse(x0);
Ak=Gk+muk*eye(n);
dk=-Ak\gk;
if norm(gk)<epsilon
break;
end
m=0;mk=0;
while m<20
if fun(x0+rho^m*dk)<fun(x0)+Sigma*rho^m*gk'*dk
mk=m;
break;
end
m=m+1;
end
x0=x0+rho^mk*dk;
end
x=x0;
val=fun(x);
end
main functin
clc;
close all;
fun=@(x) 100*(x(1)^2-x(2))^2+(x(1)-1)^2;
gfun=@(x) [400*(x(1)^2-x(2))*x(1)+2*(x(1)-1);-200*(x(1)^2-x(2))];
hesse=@(x) [1200*x(1)^2-400*x(2)+2,-400*x(1);-400*x(1),200];
x0=[0;0];
iterate=30;
[x,val,fun_t] = revise_newton(fun,gfun,hesse,x0,iterate);
disp(x);
disp(val);
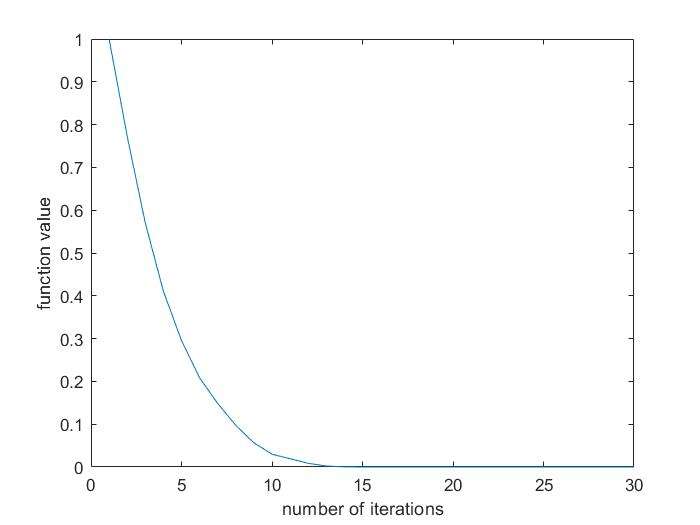
figure(1);
plot(1:iterate,fun_t);
set(get(gca, 'XLabel'), 'String', 'number of iterations');
set(get(gca, 'YLabel'), 'String', 'function value');
result
conclusion
上述图像为函数值随迭代次数变化,可见收敛速度较快;且计算结果较精确;
reference
《最优化方法及其matlab程序设计》
