线性回归代码实现(matlab)
1 代价函数实现(cost function)

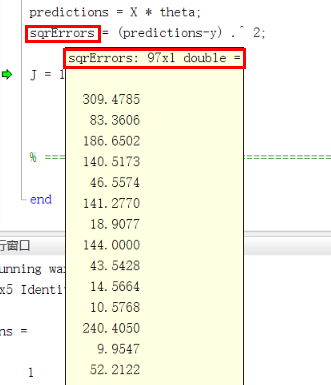
function J = computeCost(X, y, theta) %COMPUTECOST Compute cost for linear regression % J = COMPUTECOST(X, y, theta) computes the cost of using theta as the % parameter for linear regression to fit the data points in X and y % Initialize some useful values m = length(y); % number of training examples % You need to return the following variables correctly J = 0; % ====================== YOUR CODE HERE ====================== % Instructions: Compute the cost of a particular choice of theta % You should set J to the cost. predictions = X * theta; sqrErrors = (predictions-y) .^ 2; J = 1/(2*m) * sum(sqrErrors); % ========================================================================= end
1.1 详细解释
转化成了向量(矩阵)形式,如果用其他的语言,用循环应该可以实现
predictions = X * theta; % 这里的大X是矩阵
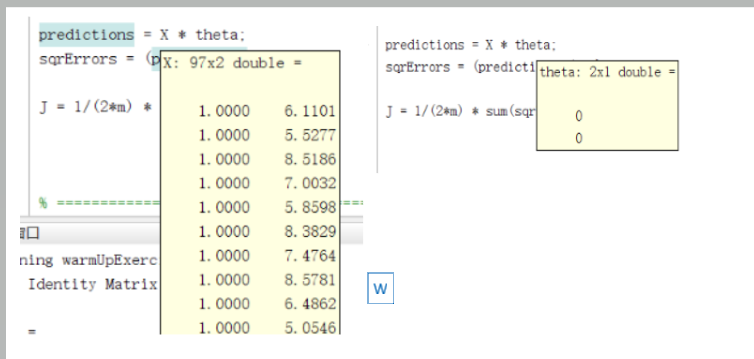
sqrErrors = (predictions-y) .^ 2;
2 梯度下降

function [theta, J_history] = gradientDescent(X, y, theta, alpha, num_iters)
%GRADIENTDESCENT Performs gradient descent to learn theta
% theta = GRADIENTDESENT(X, y, theta, alpha, num_iters) updates theta by
% taking num_iters gradient steps with learning rate alpha
% Initialize some useful values
m = length(y); % number of training examples
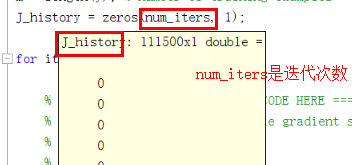
J_history = zeros(num_iters, 1);
for iter = 1:num_iters
% ====================== YOUR CODE HERE ======================
% Instructions: Perform a single gradient step on the parameter vector
% theta.
%
% Hint: While debugging, it can be useful to print out the values
% of the cost function (computeCost) and gradient here.
%
theta_temp = theta;
for j = 1:size(X, 2)
theta_temp(j) = theta(j)-alpha*(1/m)*(X*theta - y)' * X(:, j);
end
theta = theta_temp;
% ============================================================
% Save the cost J in every iteration
J_history(iter) = computeCost(X, y, theta);
end
end
2.1 解释
J_history = zeros(num_iters, 1);
theta_temp = theta;
把theta存起来。保证同时更新
for j = 1:size(X, 2)
theta_temp(j) = theta(j)-alpha*(1/m)*(X*theta - y)' * X(:, j);
end
更新theta
(X*theta - y)' 是转置
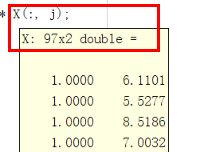
(X*theta - y)' * X(:, j);
这步是求和,相当于sum
J_history(iter) = computeCost(X, y, theta);
记录代价函数
因为随着迭代次数的增加,代价函数收敛。theta也就确定了。
代价函数的是降低,同时theta也在变化
到后面代价函数的值已经不变化了。到收敛了
作者:8亩田
本文版权归作者和博客园共有,欢迎转载,但未经作者同意必须保留此段声明,且在文章页面明显位置给出原文连接.
本文如对您有帮助,还请多帮 【推荐】 下此文。
如果喜欢我的文章,请关注我的公众号
如果有疑问,请下面留言
学而不思则罔 思而不学则殆

 浙公网安备 33010602011771号
浙公网安备 33010602011771号