NeurIPS 2017 | TernGrad: Ternary Gradients to Reduce Communication in Distributed Deep Learning
在深度神经网络的分布式训练中,梯度和参数同步时的网络开销是一个瓶颈。本文提出了一个名为TernGrad梯度量化的方法,通过将梯度三值化为\({-1, 0, 1}\)来减少通信量。此外,本文还使用逐层三值化和梯度裁剪加速算法的收敛。
在传统的数据并行SGD的每次迭代\(t\)中,训练数据会被分成\(N\)份以供\(N\)个工作节点进行训练。工作节点\(i\)根据输入样本\(z_t^{(i)}\)计算参数的梯度\(\boldsymbol{g}_t^{(i)}\),之后,工作节点将梯度发送给参数服务器。参数服务器接收到所有工作节点的梯度后,对梯度进行聚合,然后把模型参数返回给工作节点。与基于参数服务器的传统数据并行SGD不同的是,TernGrad使用了参数本地化技术。也就是说,每个工作节点维护一个本地的参数副本,所有工作节点上的参数副本都由同一个随机种子初始化。在整个训练过程中,工作节点和参数服务器之间只传递量化后的梯度。
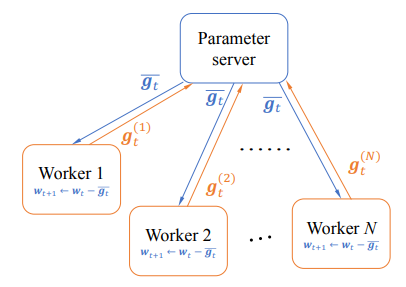
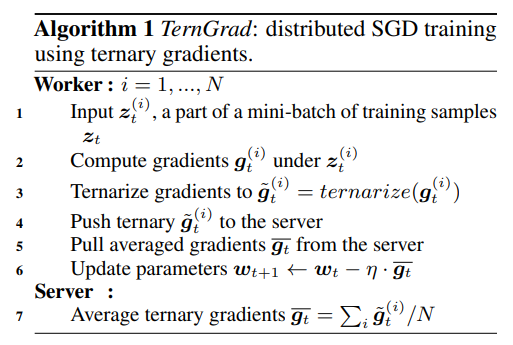
完整的TernGrad算法由Algorithm 1描述。相比于传统的数据并行SGD,TernGrad在每个工作节点上增加了梯度三值化和参数更新两个操作,参数服务器只需要聚合三值化后的梯度。
具体来说,TernGrad按照下式将梯度向量中的每个值映射到\(\{-1,0,+1\}\)上,这里\(\boldsymbol{b}_t\)是一个二元随机向量。
其中\(s_t\)是一个对\(\pm 1\)进行缩放的标量。\(\circ\)是Hadamard乘积,\(\text{sign}(\cdot)\)和\(\text{abs}(\cdot)\)分别返回每个元素的符号和绝对值。对于给定的\(\boldsymbol{g}_t\),\(\boldsymbol{b}_t\)的每个元素都独立地服从伯努利分布:
其中\(b_{tk}\)和\(g_{tk}\)分别是\(\boldsymbol{b}_t\)和\(\boldsymbol{b}_t\)的第\(k\)个元素。之所以选择这种随机性舍入(stochastic rounding)而不是确定性舍入,是因为随机性舍入具有无偏的期望值且在低精度处理中应用广泛。
理论上,TernGrad至少可以将工作节点传递给参数服务器的通信量减少\(32/\log_2(3)\approx20.18\)倍。在实际实现上,我们至少需要2bit来编码\({-1, 0, 1}\)三个值,因此实际上能够减少约16倍的通信量。前面提到,TernGrad使用参数本地化技术来减少参数服务器传递给工作节点的通信量,也就是说参数服务器只对工作节点发送来的三值化梯度进行聚合。这可能导致聚合后的梯度\(\overline{\boldsymbol{g}_t}\)不再是三值化的,尤其是当工作节点使用不同的缩放因子\(s_t^{(i)}\)时。为了解决这一问题,作者使用标量共享技术,即所有工作节点之间共享同一个缩放因子\(s_t\):
通过将参数本地化与标量共享相结合,理论上参数服务器传递给工作节点的通信量至少会降低\(32/\log_2(1+2N)\)倍。为了提高TernGrad的精度,本文提出了逐层三值化(layer-wise ternarizing)与梯度裁剪(gradient clipping)技术。在神经网络的每一层,梯度会随着后向传播而发生改变。因此,TernGrad在每一层使用不同的缩放因子,并且分别对权重和偏置进行三值化。为了进一步提高精度,还可以把梯度分割到不同的桶(bucket)中,再分别进行三值化。但是,这种方法将引入更多的浮点缩放因子并增加通信量。
逐层三值化可以缩小跨层梯度的动态值域所带来的方差间隔。然而,某一层梯度的动态值域仍然是一个问题。因此,TernGrad还使用了梯度裁剪技术,也就是限制梯度\(\boldsymbol{g}\)中元素\(g_i\)的范围:
其中\(\sigma\)是\(\boldsymbol{g}\)中元素的标准差,\(c\)是一个需要调整的超参数,本文将该参数设置为2.5。在分布式训练时,每个工作节点先进行梯度裁剪操作,再进行梯度三值化操作。根据图2可以看出,无论是卷积层还是全连接层,所有的梯度都服从高斯分布并且集中在一个很小的范围内。梯度裁剪就是只保留小范围内的梯度,丢弃范围外的梯度。裁剪后,梯度近似服从正态分布,并且方向改变了一个小角度。
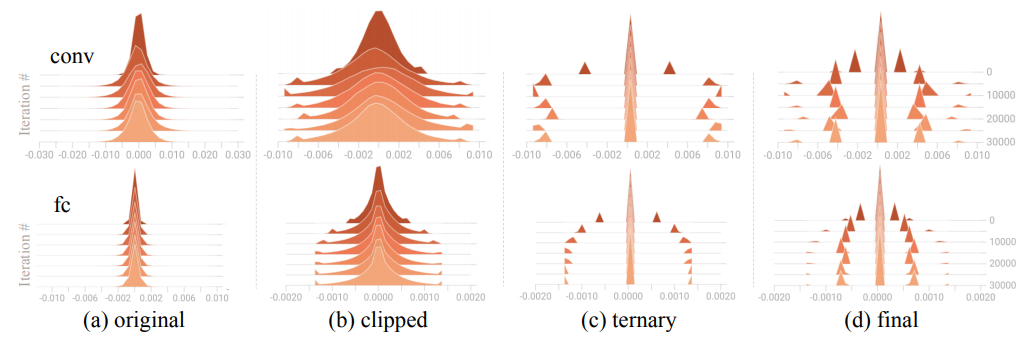
上述两种方法之所以有效,是因为当缩放因子\(s_t\)过大时,大多数梯度被三值化为\(0\),只有少数梯度被三值化为\(\pm 1\)。这就可能使得大多数参数不变而其他参数一直在调整,从而引入较高的训练方差。通过逐层三值化和梯度裁剪,就可以降低\(s_t\)的值,并且梯度分布近似于正态分布,从而降低了训练时的方差。
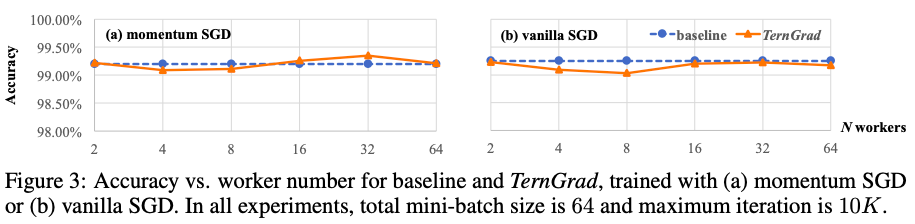
本文第一组实验主要比较了TernGrad在不同训练模式下的精度。这组实验用到了2个模型,分别是在MNIST数据集上训练的LeNet以及在CIFAR-10数据集上训练的ConvNet,其中ConvNET在训练时使用了数据增强技术。主要用到的优化算法包括传统的SGD,带动量的SGD以及Adam。图3是LeNet的实验结果。可以看到,使用TernGrad后的传统SGD和带动量的SGD可以在相同的迭代次数内收敛,并且精度不会损失很多。
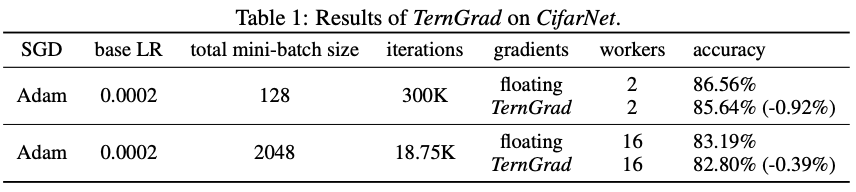
表1是ConvNet的实验结果。实验中,将每个工作节点的batch size设置为固定值。因此,总的batch size会随着工作节点的增加而线性增加。当batch size增大时,TernGrad和baseline的都会略有下降,这是因为较大的batch size会使参数的更新频率降低+,导致模型收敛到尖锐的极小值附近。
本文的第二部分实验主要介绍了将TernGrad在大规模训练时的效果。为了使TernGrad能够成功训练大型神经网络模型,实验中做了以下改动:
- 减少了dropout的比率。因为dropout为神经网络添加了随机性(相当于正则化),而TernGrad本身就引入了随机性。过高的dropout比率与TernGrad相结合会使模型效果变差。
- 使用较小的权值衰减策略,原因同上。
- 不对最后一层进行三值化。因为最后一层的one-hot编码会生成一个倾斜的分布,而三值化后的分布是对称的。

实验中所有的网络模型都使用带动量的SGD以及批量归一化(batch normalization)进行训练。AlexNet的结果如表2所示,每个工作节点的batch size固定为128。为了方便实验的进行,所有的深度网络模型都训练相同的epoch。因此,当工作节点增加时,总体的迭代次数就会变少,参数更新频率也会降低。在batch size增大的同时适当增加学习率可以克服这一问题。
接下来,我们对模型的性能,即吞吐量进行分析。我们主要分析了三个不同的网络模型——AlexNet、GoogLeNet和VggNet-A在使用不同数量的GPU时的吞吐量。
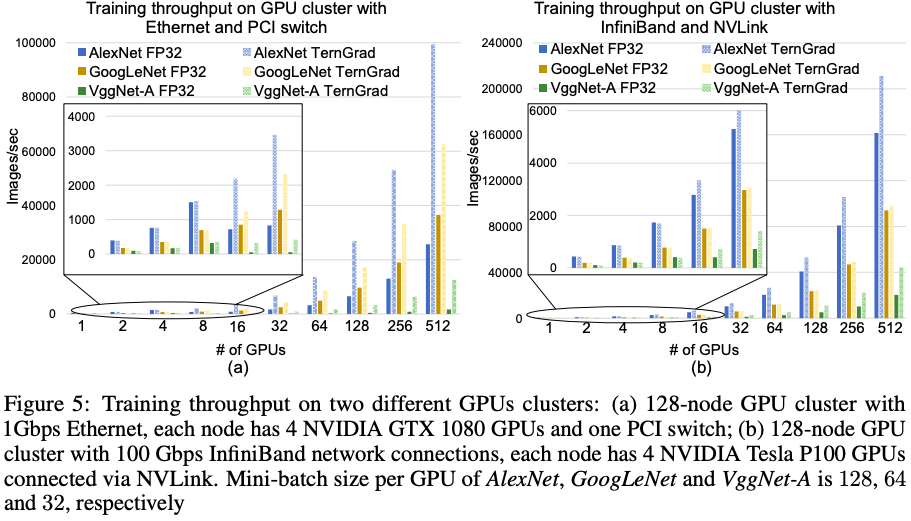
图5是三种网络模型在两个不同的GPU集群上的训练吞吐量。可以看到,TernGrad可以有效地提高训练吞吐量。总的来说,并行加速比取决于网络模型的通信-计算比、GPU的数量和网络带宽。拥有较大通信-计算比的网络模型(如AlexNet和VggNet-A)会更加受益于TernGrad。如图5(a)所示,TernGrad在带宽较小时表现非常好。图5(b)则说明使用高速互连网络(InfiniBand)时,TernGrad仍然可以对训练进行加速
本文来自博客园,作者:shuo-ouyang,转载请注明原文链接:https://www.cnblogs.com/shuo-ouyang/p/12559335.html

 浙公网安备 33010602011771号
浙公网安备 33010602011771号