


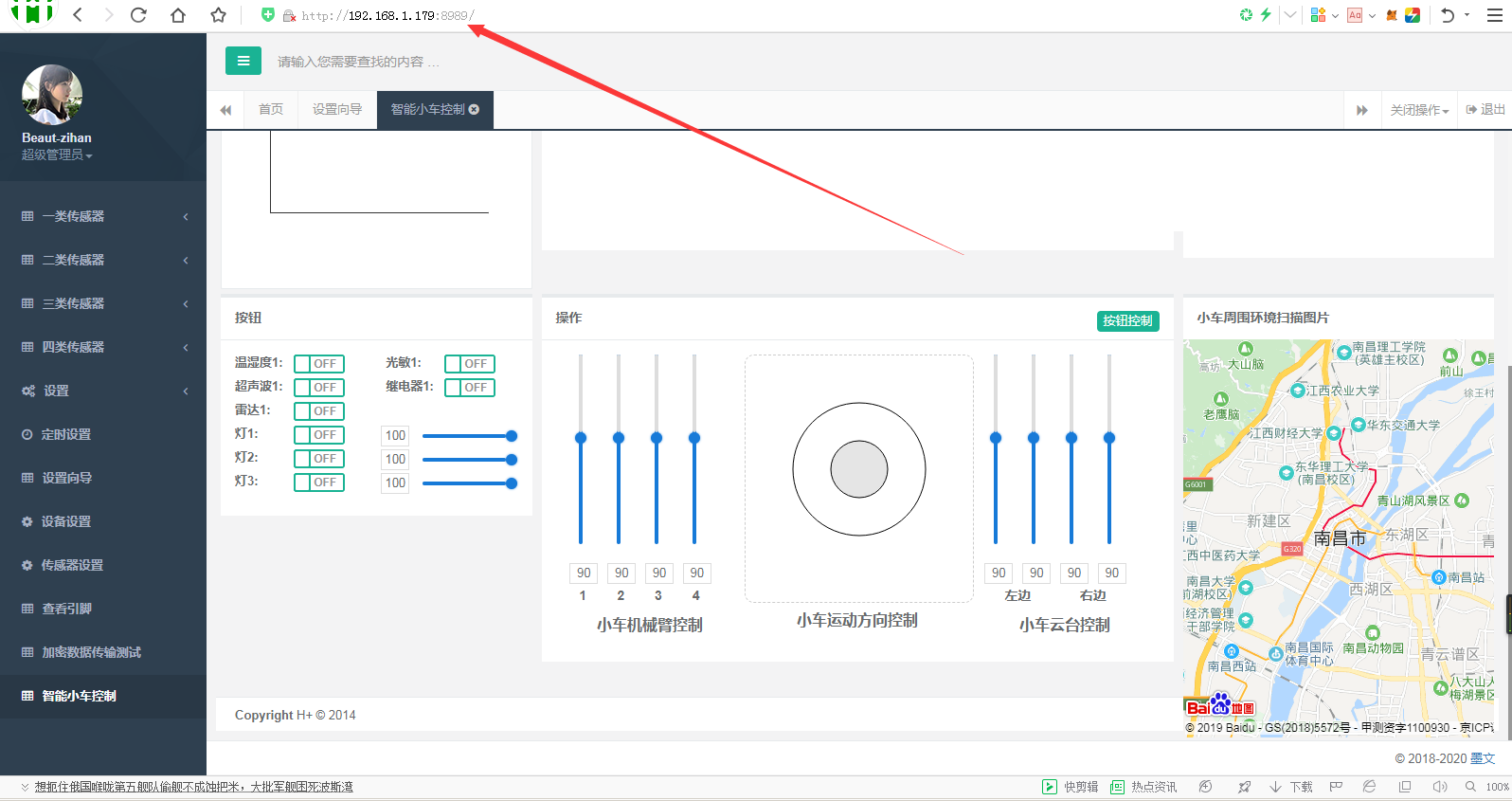
SmartRobotControlPlateform——智能机器人控制平台
具体成果参考github项目:https://github.com/ecjtuseclab/SmartRobotControlPlateform
这里我使用的镜像是:2018-11-13-raspbian-stretch.img,原来一直用的是ubuntu_meta,从运行性能考虑,决定换成raspbian,下面的一些安装方式都是适用于raspbian的。
环境为:raspbian+python2.7+mysql+redis
1、系统安装
配置参考此文: 树莓派安装raspbian并配置开发环境
https://blog.csdn.net/hu5566798/article/details/98756911
PS:使用的是raspbian自带的远程桌面vnc,传文件、命令也可以直接复制到运程桌面中,比较方便。
更改清华源
https://mirror.tuna.tsinghua.edu.cn/help/raspbian/
2、切换python运行版本(由于已经把Django的版本设为了python 2.7 ,此步骤已经不需要了)
在Ubuntu_meta 16.04中设置默认Python3.5的命令
直接执行这两个命令即可:
sudo update-alternatives --install /usr/bin/python python /usr/bin/python2 100 sudo update-alternatives --install /usr/bin/python python /usr/bin/python3 150
3、安装Pi 仪表盘
同时将Apache和php配置完成。
4、安装MySQL
参考此文:Ubuntu下安装MySQL
sudo apt-get install mysql-server mysql-client #或者 #sudo apt-get install mariadb-server mariadb-client
5、安装Django
参考此文:ubuntu安装Django
pip install django
#或者
#pip3 install django
a、安装pymysql数据库模块
参考此文:Django安装数据库MySQLdb
pip install pymysql
#或者
#pip3 install pymysql

如果运行Django提示无法访问mysql数据库,则
进入mysql数据库
sudo mysql
查询user表
use mysql select Host,User from user;
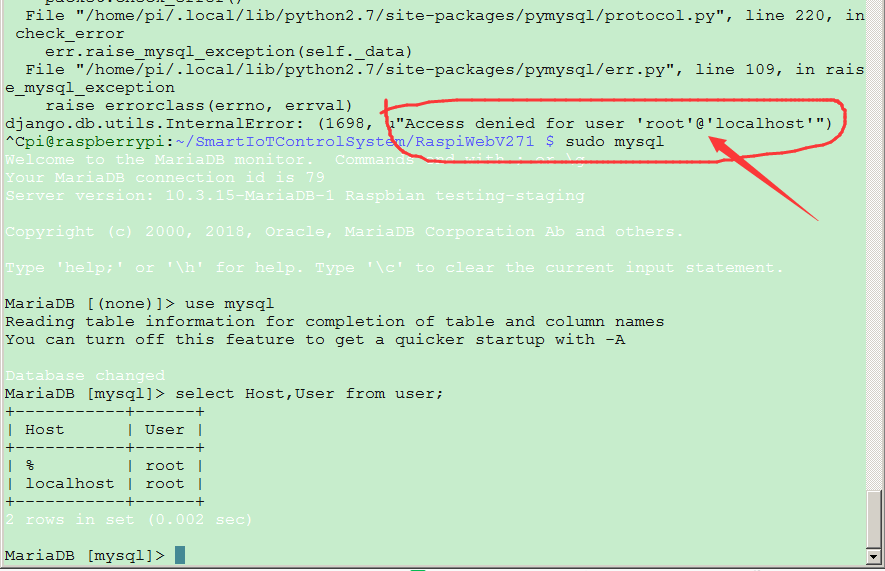
发现有两条root记录,其中 localhsot root 是 mariadb 数据库安装默认的,需要删除
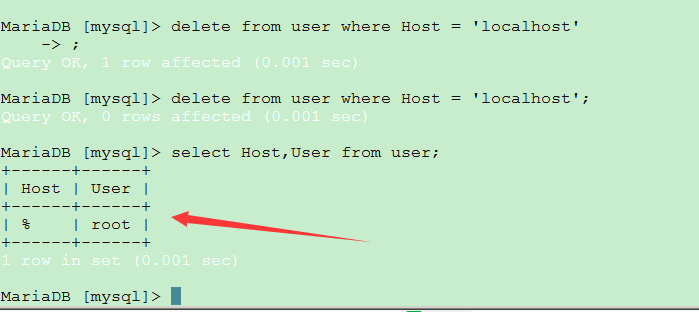
重启mysql服务
sudo service mysql restart
运行正常
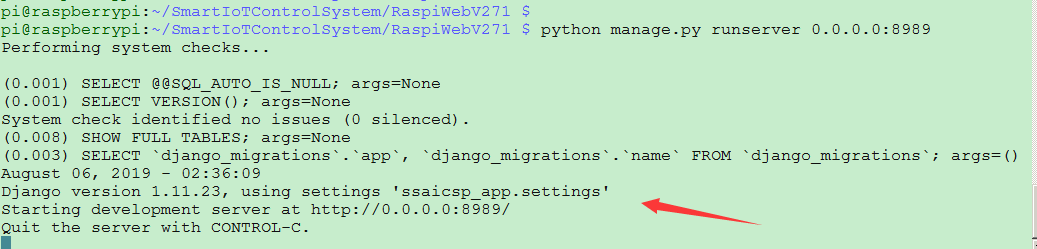
可以访问
6、安装Redis
参考此文:linux与python3安装redis
sudo apt-get install redis* pip install redis #或者 #pip3 install redis

7、Python安装pymysql
参考此文:python安装PyMySQL
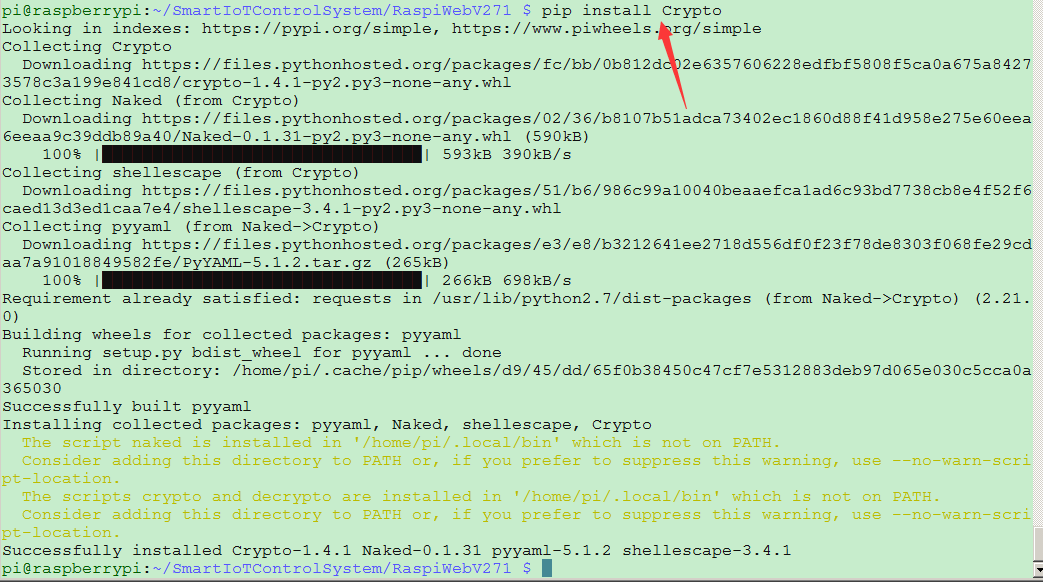
8、Python安装密码学库Crypto
pip install Crypto
#或者
#pip3 install Crypto
如果还是出错,参考此博文:python3.6 错误: ModuleNotFoundError:No module named "Crypto"
https://blog.csdn.net/zoulonglong/article/details/79552813
9、python安装MySQLclient
参考此文:python安装MySQLclient
10、安装sumbus模块
sudo apt-get install python-smbus
pip install smbus
11、安装视频流mjpg-streamer-experimental
参考此文:https://www.jianshu.com/p/ecea3a8291ed
12、安装ffmpeg视频推流工具
参考此文:https://blog.csdn.net/weixin_33946020/article/details/87618803
13、安装与配置激光雷达
安装hiredis
参考资料:https://blog.csdn.net/qq_27385759/article/details/78981884
安装cmake
sudo apt install cmake
编译、安装、运行激光雷达程序
mkdir build cd build cmake ../ -G "CodeBlocks - Unix Makefiles" make sudo chmod 777 /dev/ttyUSB0(NOTE:please select correct serial in “app\node.cpp”) ./delta_lidar_node

