GRU-门控循环单元
例如,循环神经网络在实践中一个常见问题是数值不稳定性。尽管我们已经应用了梯度裁剪等技巧来缓解这个问题,但是仍需要通过设计更复杂的序列模型来进⼀步处理它。具体来说,我们将引⼊两个广泛使用的网络,即门控循环单元(GRU)和长短期记忆网络(LSTM)。
门控循环单元(GRU)
我们讨论了如何在循环神经网络中计算梯度,以及矩阵连续乘积可以导致梯度消失或梯度爆炸的问题。下面我们简单思考⼀下这种梯度异常在实践中的意义:
- 我们可能会遇到这样的情况:早期观测值对预测所有未来观测值具有非常重要的意义。考虑⼀个极端情况,其中第一个观测值包含⼀个校验和,目标是在序列的末尾辨别校验和是否正确。在这种情况下,第⼀个词元的影响至关重要。我们希望有某些机制能够在⼀个记忆元里存储重要的早期信息。如果没有这样的机制,我们将不得不给这个观测值指定⼀个非常大的梯度,因为它会影响所有后续的观测值。(希望某些机制能够在一个记忆元里存储重要的早期信息)
- 我们可能会遇到这样的情况:⼀些词元没有相关的观测值。例如,在对网页内容进行情感分析时,可能有⼀些辅助HTML代码与网页传达的情绪无关。我们希望有⼀些机制来跳过隐状态表示中的此类词元。(希望某些机制能够跳过隐状态表示中的此类次元)
- 我们可能会遇到这样的情况:序列的各个部分之间存在逻辑中断。例如,书的章节之间可能会有过渡存在,或者证券的熊市和牛市之间可能会有过渡存在。在这种情况下,最好有⼀种方法来重置我们的内部状态表示。(希望某些机制能够重置内部状态表示)
在学术界已经提出了许多方法来解决这类问题。其中最早的方法是”长短期记忆”(LSTM),我们将在这里讨论。门控循环单元(GRU)是⼀个稍微简化的变体,通常能够提供同等的效果,并且计算的速度明显更快。由于门控循环单元更简单,我们从它开始解读。
我们知道做RNN的时候处理不了太长的序列,因为序列信息全部放在隐藏状态中,当时间到达一定长度的时候,隐藏状态中会累积过多的信息,不利于相对靠前的信息的抽取。例如:

在观察一个序列的时候,不是每个观察值都同等重要 - 对于一个猫的图片的序列突然出现一只老鼠,老鼠的出现很重要,第一次出现猫也很重要,但是之后再出现猫就不那么重要了
- 在一个句子中,可能只是一些关键字或者关键句比较重要
- 视频处理中,其实帧与帧之间很多时候都差不多,但是在切换场景的时候,每次的切换是比较重要的
门控隐状态
门控循环单元与普通的循环神经网络之间的关键区别在于:前者支持隐状态的门控。这意味着模型有专门的机制来确定应该何时更新隐状态,以及应该何时重置隐状态。这些机制是可学习的,并且能够解决了上面列出的问题。例如,如果第一个词元非常重要,模型将学会在第⼀次观测之后不更新隐状态。同样,模型也可以学会跳过不相关的临时观测。最后,模型还将学会在需要的时候重置隐状态。下面我们将详细讨论各类门控。
在RNN中没有特别关心某些地方的机制,对于它来讲仅仅是一个序列,而门控循环单元可以通过些额外的控制单元,使得在构造隐藏状态的时候能够挑选出相对来说更加重要的部分(注意力机制在这方面强调得更多一点)
- 更新门(update gate):能关注的机制,能够将信息尽量放在隐藏状态中,控制新状态中有多少个是旧状态的副本
- 重置门(reset gate):能遗忘的机制,能够遗忘输入或者隐藏状态中的一些信息,控制"可能还想记住"的过去状态的数量
重置门和更新门
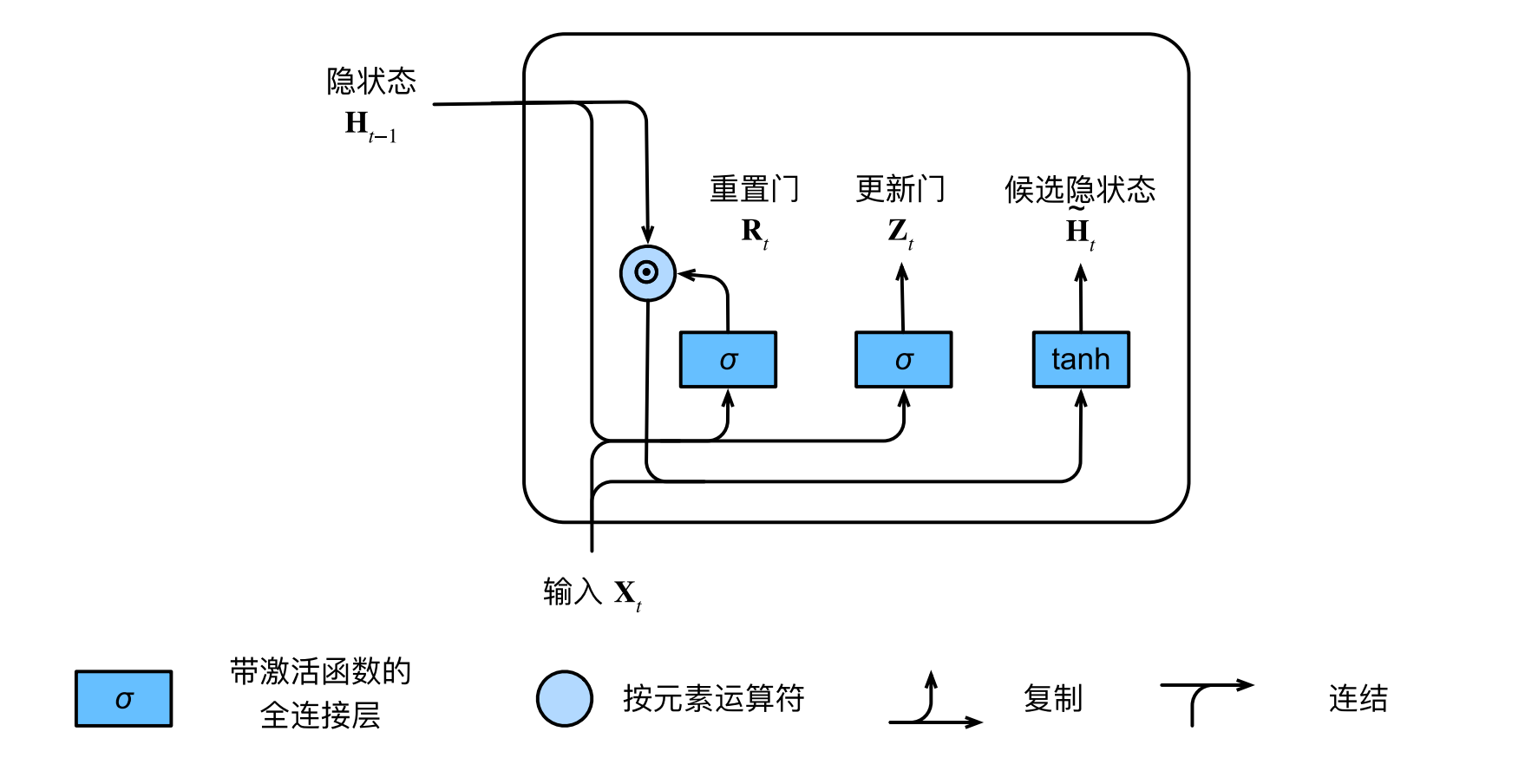
我们首先介绍重置门(reset gate)和更新门(update gate)。我们把它们设计成(0, 1)区间中的向量,这样我们就可以进行凸组合。重置门允许我们控制“可能还想记住”的过去状态的数量;更新门将允许我们控制新状态中有多少个是旧状态的副本。
我们从构造这些门控开始。下图描述了门控循环单元中的重置门和更新门的输入,输入是由当前时间步的输入和前一时间步的隐状态给出。两个门的输出是由使用sigmoid激活函数的两个全连接层给出。

我们来看⼀下门控循环单元的数学表达。对于给定的时间步t,假设输入是⼀个小批\(X_t \in R^{n×d}\)(样本个
数n,输入个数d),上一个时间步的隐状态是\(H_{t−1} \in R^{n×h}\)(隐藏单元个数h)。那么,重置门\(R_t \in R^{
n×h}\)和更新门\(Z_t \in R^{n×h}\)的计算如下所示:
\(R_t = \sigma (X_tW_{xr} + H_{t−1}W_{hr} + b_r),\)
\(Zt = \sigma (X_tW_{xz} + H_{t−1}W_{hz} + b_z),\)
其中\(W_{xr}\), \(W_{xz} \in R^{d×h}\) 和\(W_{hr}\),\(W_{hz} \in R^{h×h}\)是权重参数,\(b_r, b_z \in R^{1×h}\)是偏置参数。
候选隐状态
并不是真正的隐藏状态,只是用来生成真正的隐藏状态。接下来,让我们将重置门\(R_t\)与的常规隐状态更新机制集成,得到在时间步t的候选隐状态\(\widetilde{H}_t \in R ^{n×h}\)。
其中\(W_{xh} \in R^{d×h}\)和\(W_{hh} \in R ^{h×h}\)是权重参数,\(b_h \in R^{1×h}\)是偏置项,符号⊙是Hadamard积(按元素乘积)运算符。在这⾥,我们使⽤tanh⾮线性激活函数来确保候选隐状态中的值保持在区间(−1, 1)中。
- \(R_t\)与\(H_{t-1}\)按元素乘法,对于一个样本来讲,\(R_t\)和\(H_{t-1}\)是一个长度相同的向量,所以可以按照元素做乘法
- \(R_t\)是一个取值为0~1的值,\(R_t\)越靠近0,\(R_t\)与\(H_{t-1}\)按元素乘法得到的结果就越接近О ,也就相当于将上一时刻的隐藏状态忘掉
- 极端情况下,如果\(R_t\)全部变成0的话,就相当于从当前时刻开始,前面的信息全部不要,隐藏状态变成О,从初始化状态开始,任何预先存在的隐状态都会被重置为默认值
- 另外一个极端情况:如果\(R_t\)全是1的话,就表示将当前时刻之前所有的信息全部拿过来做更新,就等价于RNN中隐藏状态的更新方式
- 实际上\(R_t\)是一个可以学习的参数,所以它会根据前面的信息来学习哪些信息是能够进入到下一轮隐藏状态的更新,哪一些信息需要进行舍弃,这些操作都是自动进行的,因此被叫做控制单元
隐状态
门控循环单元与普通的循环神经网络之间的关键区别在于:前者支持隐状态的门控,这意味着模型有专门的机制来确定应该何时更新隐状态,以及应该何时重置隐状态(这些机制都是可学习的)。上述的计算结果只是候选隐状态,我们仍然需要结合更新门\(Z_t\)的效果。这⼀步确定新的隐状态\(H_t \in R^{n×h}\)在多大程度上来自旧的状态\(H_{t−1}\)和新的候选状态\(\widetilde{H}_t\)。更新门\(Z_t\)仅需要在\(H_{t−1}\)和\(\widetilde{H}_t\)之间进行按元素的凸组合就可以实现这个⽬标。这就得出了门控循环单元的最终更新公式:
每当更新门\(Z_t\)接近1时,模型就倾向只保留旧状态。此时,来⾃\(X_t\)的信息基本上被忽略,从而有效地跳过了依赖链条中的时间步t。相反,当\(Z_t\)接近0时,新的隐状态\(H_t\)就会接近候选隐状态\(\widetilde{H}_t\)。这些设计可以帮助我们处理循环神经网络中的梯度消失问题,并更好地捕获时间步距离很长的序列的依赖关系。例如,如果整个子序列的所有时间步的更新门都接近于1,则无论序列的长度如何,在序列起始时间步的旧隐状态都将很容易保留并传递到序列结束。

总结一下:
- \(Z_t\)也是一些取值为0~1的一些数字组成的
- 假设\(Z_t\)都等于1 ,即\(H_t\)等于\(H_{t-1}\),相当于不使用\(X_t\)来更新隐藏状态,直接将过去的状态当成现在的状态,模型只保留旧状态,此时,来自\(X_t\)的信息基本上被忽略.当整个子序列的所有时间步的更新门都接近于1 ,则无论序列的长度如何,在序列起始时间步的旧隐状态都将很容易保留并传递到序列结束
- 假设\(Z_t\)都等于0,\(H_t\)等于候选隐状态\(\widetilde{H}_t\). 相当于回到了RNN的情况,不看过去的隐藏状态,只看现在更新的隐藏状态,能够帮助处理循环神经网络中的梯度消失问题,并且能够更好地捕获时间步距离很长的序列的依赖关系
总之,门控循环单元具有以下两个显著特征:
- 重置门有助于捕获序列中的短期依赖关系;
- 更新门有助于捕获序列中的长期依赖关系。
- GRU中引入了两个额外的门,每个门可以学习的参数和RNN一样多,整个可学习的权重数量是RNN的三倍
- \(R_t\)和\(Z_t\)都是控制单元,用来输出取值为0~1的数值
- \(R_t\)用来衡量在更新新的隐藏状态的时候,要用到多少过去隐藏状态的信息
- \(Z_t\)用来衡量在更新新的隐藏状态的时候,需要用到多少当前\(X_t\)相关的信息
- 当\(Z_t\)全为0,\(R_t\)全为1时,等价于RNN.当\(Z_t\)全为1时,直接忽略掉当前\(X_t\)
- GRU通过引入\(R_t\)和\(Z_t\),从而能够在各种极端情况之间进行调整门控循环神经网络可以更好地捕获时间步距离很长的序列上的依赖关系
- 重置门打开时,门控循环单元包含基本循环神经网络更新门打开时,门控循环单元可以跳过子序列
从零开始实现
我们依旧使用之前的数据集:
import torch
from torch import nn
from d2l import torch as d2l
batch_size, num_steps = 32, 35
train_iter, vocab = d2l.load_data_time_machine(batch_size, num_steps)
初始化模型参数
下⼀步是初始化模型参数。我们从标准差为0.01的高斯分布中提取权重,并将偏置项设为0,超参数num_hiddens定义隐藏单元的数量,实例化与更新门、重置门、候选隐状态和输出层相关的所有权重和偏置。
def get_params(vocab_size, num_hiddens, device):
num_inputs = num_outputs = vocab_size
def normal(shape):
return torch.randn(size=shape, device=device) * 0.01
def three():
return (normal(
(num_inputs, num_hiddens)), normal((num_hiddens, num_hiddens)),
torch.zeros(num_hiddens, device=device))
W_xz, W_hz, b_z = three()# 更新⻔参数
W_xr, W_hr, b_r = three()# 重置⻔参数
W_xh, W_hh, b_h = three()# 候选隐状态参数
# 输出层参数
W_hq = normal((num_hiddens, num_outputs))
b_q = torch.zeros(num_outputs, device=device)
# 附加梯度
params = [W_xz, W_hz, b_z, W_xr, W_hr, b_r, W_xh, W_hh, b_h, W_hq, b_q]
for param in params:
param.requires_grad_(True)
return params
定义模型
现在我们将定义隐状态的初始化函数init_gru_state。与之前定义的init_rnn_state函数⼀样,此函数返回⼀个形状为(批量大小,隐藏单元个数)的张量,张量的值全部为零。
def init_gru_state(batch_size, num_hiddens, device):
return (torch.zeros((batch_size, num_hiddens), device=device),)
现在我们准备定义门控循环单元模型,模型的架构与基本的循环神经网络单元是相同的,只是权重更新公式更为复杂。
def gru(inputs, state, params):
W_xz, W_hz, b_z, W_xr, W_hr, b_r, W_xh, W_hh, b_h, W_hq, b_q = params
H, = state
outputs = []
for X in inputs:#套用那几个公式
Z = torch.sigmoid((X @ W_xz) + (H @ W_hz) + b_z)
R = torch.sigmoid((X @ W_xr) + (H @ W_hr) + b_r)
H_tilda = torch.tanh((X @ W_xh) + ((R * H) @ W_hh) + b_h)
H = Z * H + (1 - Z) * H_tilda
Y = H @ W_hq + b_q
outputs.append(Y)
return torch.cat(outputs, dim=0), (H,)
训练与预测
训练和预测的工作方式与RNN完全相同。训练结束后,我们分别打印输出训练集的困惑度,以及前缀“time traveler”和“traveler”的预测序列上的困惑度。
vocab_size, num_hiddens, device = len(vocab), 256, d2l.try_gpu()
num_epochs, lr = 500, 1
model = d2l.RNNModelScratch(len(vocab), num_hiddens, device, get_params,
init_gru_state, gru)
d2l.train_ch8(model, train_iter, vocab, lr, num_epochs, device)
perplexity 1.1, 19768.4 tokens/sec on cuda:0
time traveller fourse you cannot move at all in time you cannot
travelleryou can show black is white by argument said filby

简洁实现
num_inputs = vocab_size
gru_layer = nn.GRU(num_inputs, num_hiddens)
model = d2l.RNNModel(gru_layer, len(vocab))
model = model.to(device)
d2l.train_ch8(model, train_iter, vocab, lr, num_epochs, device)
perplexity 1.0, 204526.7 tokens/sec on cuda:0
time traveller for so it will be convenient to speak of himwas e
traveller with a slight accession ofcheerfulness really thi

总结:

- 重置门有助于捕获序列中的短期依赖关系;
- 更新门有助于捕获序列中的长期依赖关系。
- GRU中引入了两个额外的门,每个门可以学习的参数和RNN一样多,整个可学习的权重数量是RNN的三倍
- \(R_t\)和\(Z_t\)都是控制单元,用来输出取值为0~1的数值
- \(R_t\)用来衡量在更新新的隐藏状态的时候,要用到多少过去隐藏状态的信息
- \(Z_t\)用来衡量在更新新的隐藏状态的时候,需要用到多少当前\(X_t\)相关的信息
- 当\(Z_t\)全为0,\(R_t\)全为1时,等价于RNN.当\(Z_t\)全为1时,直接忽略掉当前\(X_t\)
- GRU通过引入\(R_t\)和\(Z_t\),从而能够在各种极端情况之间进行调整门控循环神经网络可以更好地捕获时间步距离很长的序列上的依赖关系
- 重置门打开时,门控循环单元包含基本循环神经网络更新门打开时,门控循环单元可以跳过子序列

 浙公网安备 33010602011771号
浙公网安备 33010602011771号