深度强化学习基础(王树森)
王树森—深度强化学习基础
1 基本概念
概率论
随机变量:值取决于随机事件的结果
大写字母表示随机变量,小写字母表示随机变量的观测值
概率密度函数(Probability Density Function, PDF):随机变量在某个确定的取值点附近的可能性
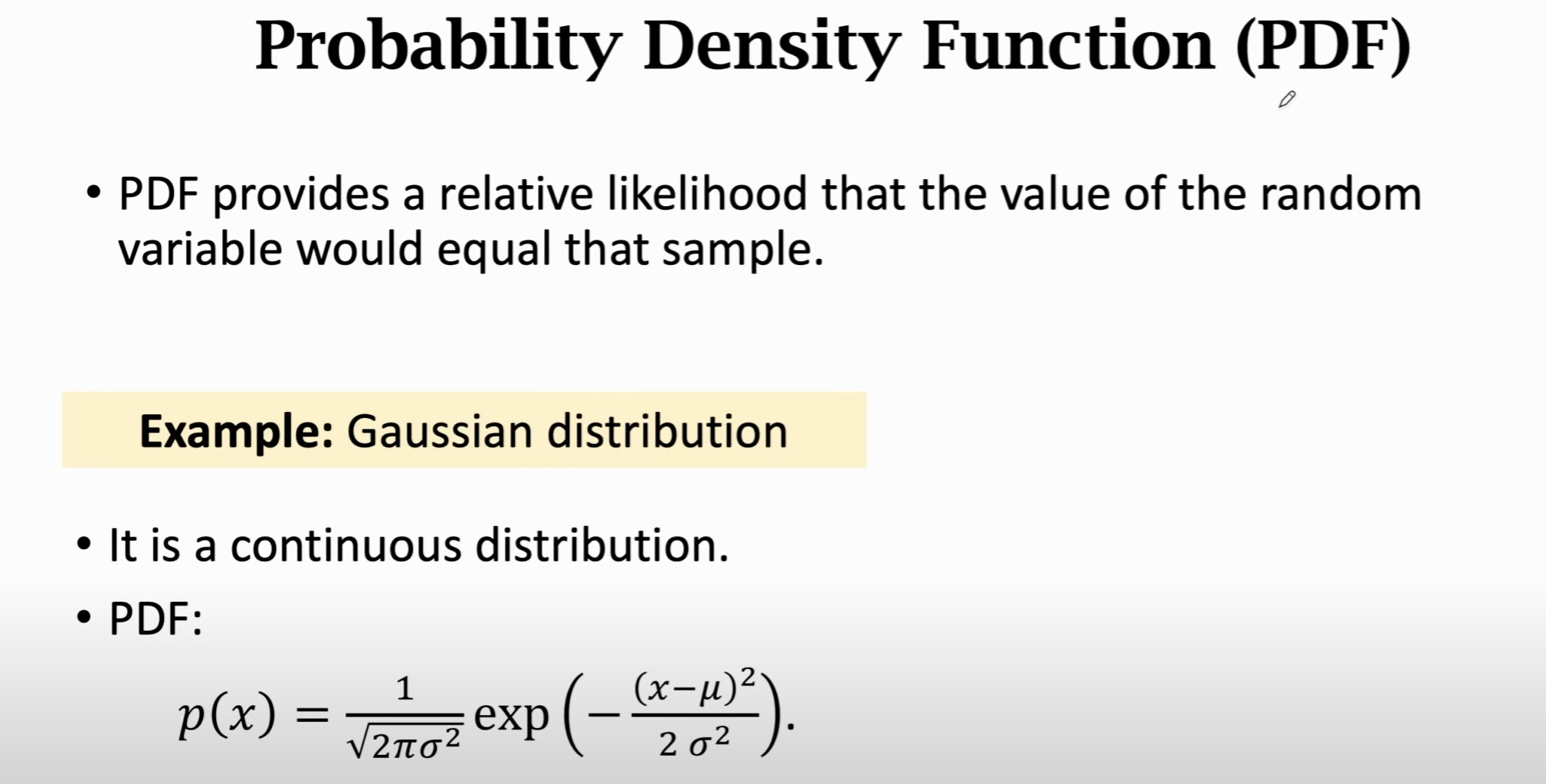
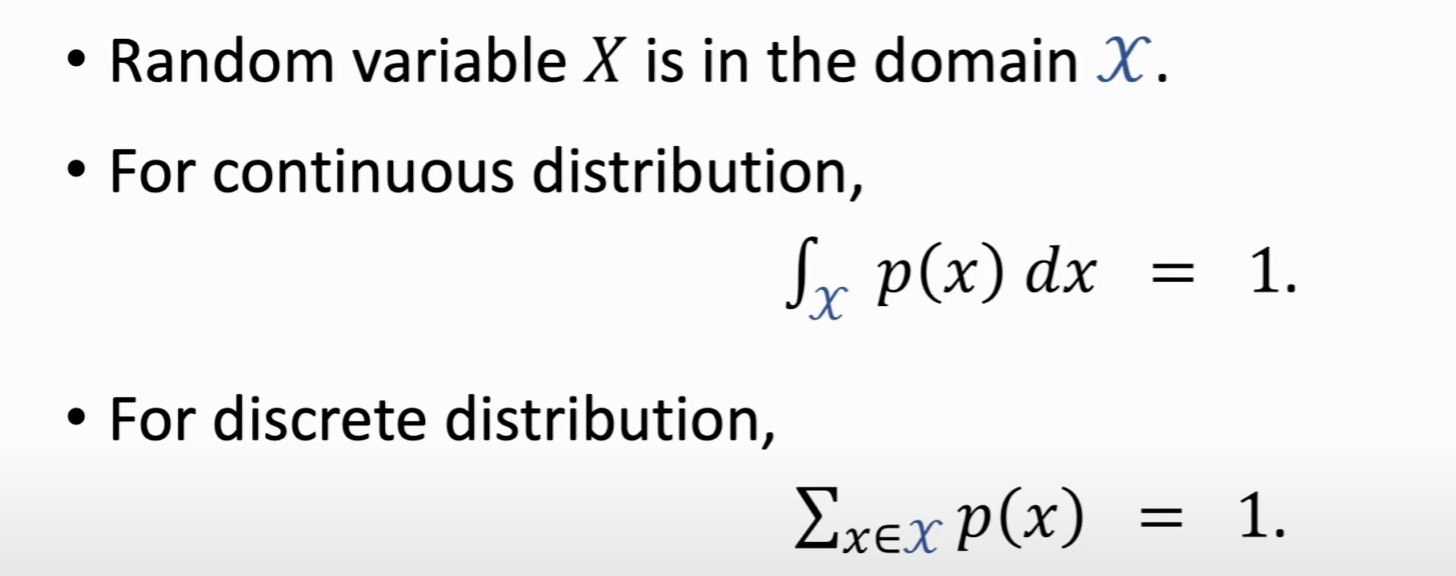
连续 or 离散
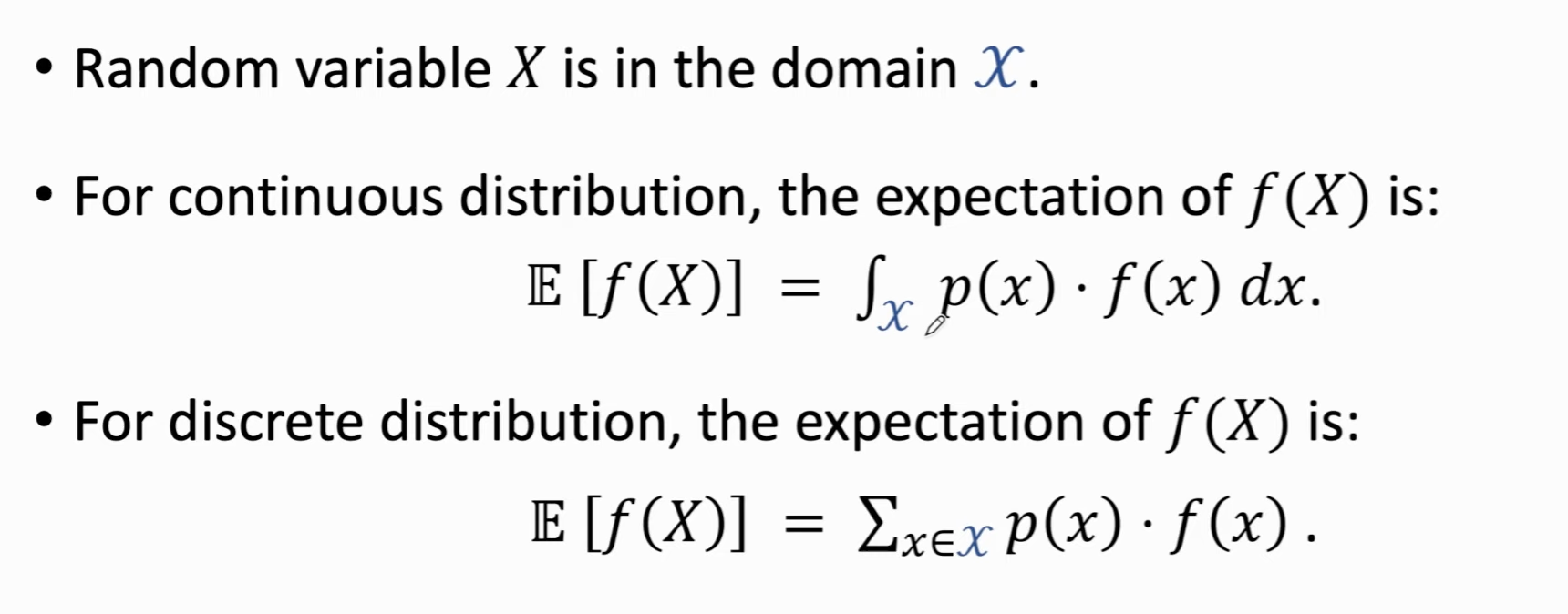
期望:
为概率密度函数
术语
状态(state)
动作(action)
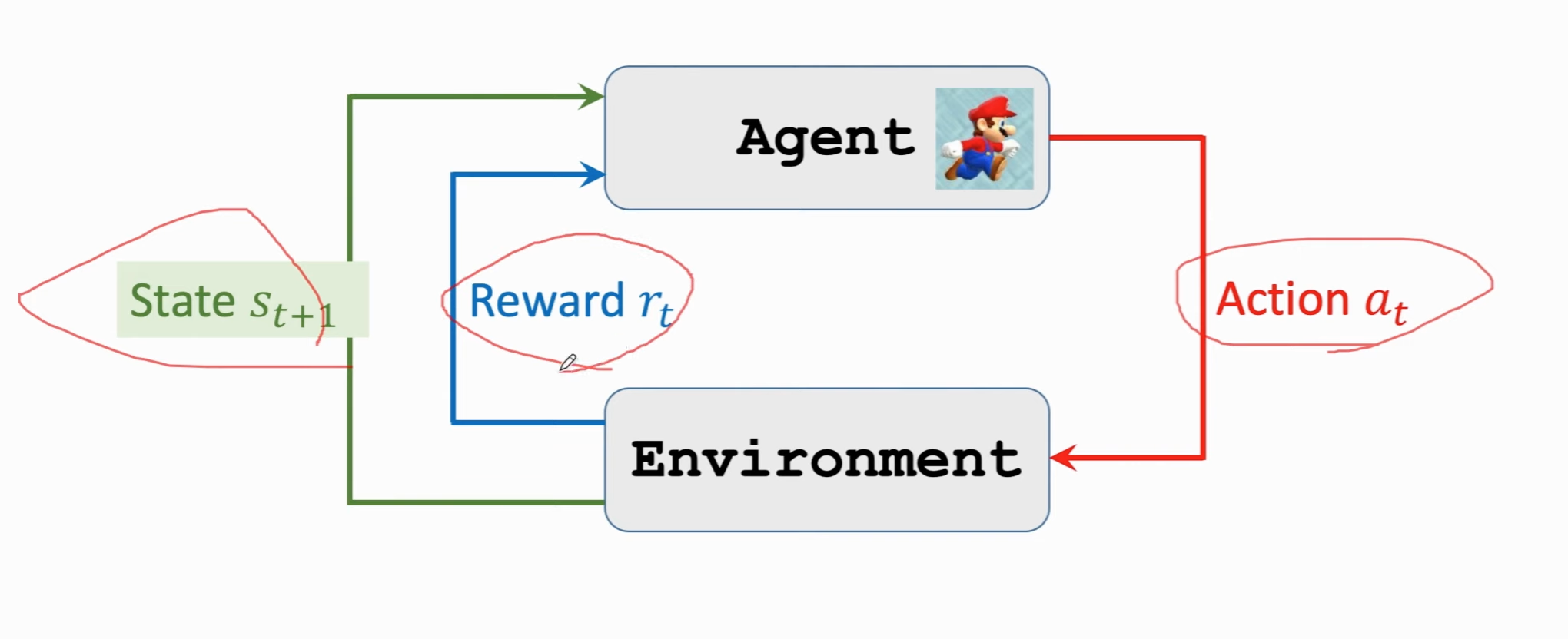
智能体(agent):动作的执行者
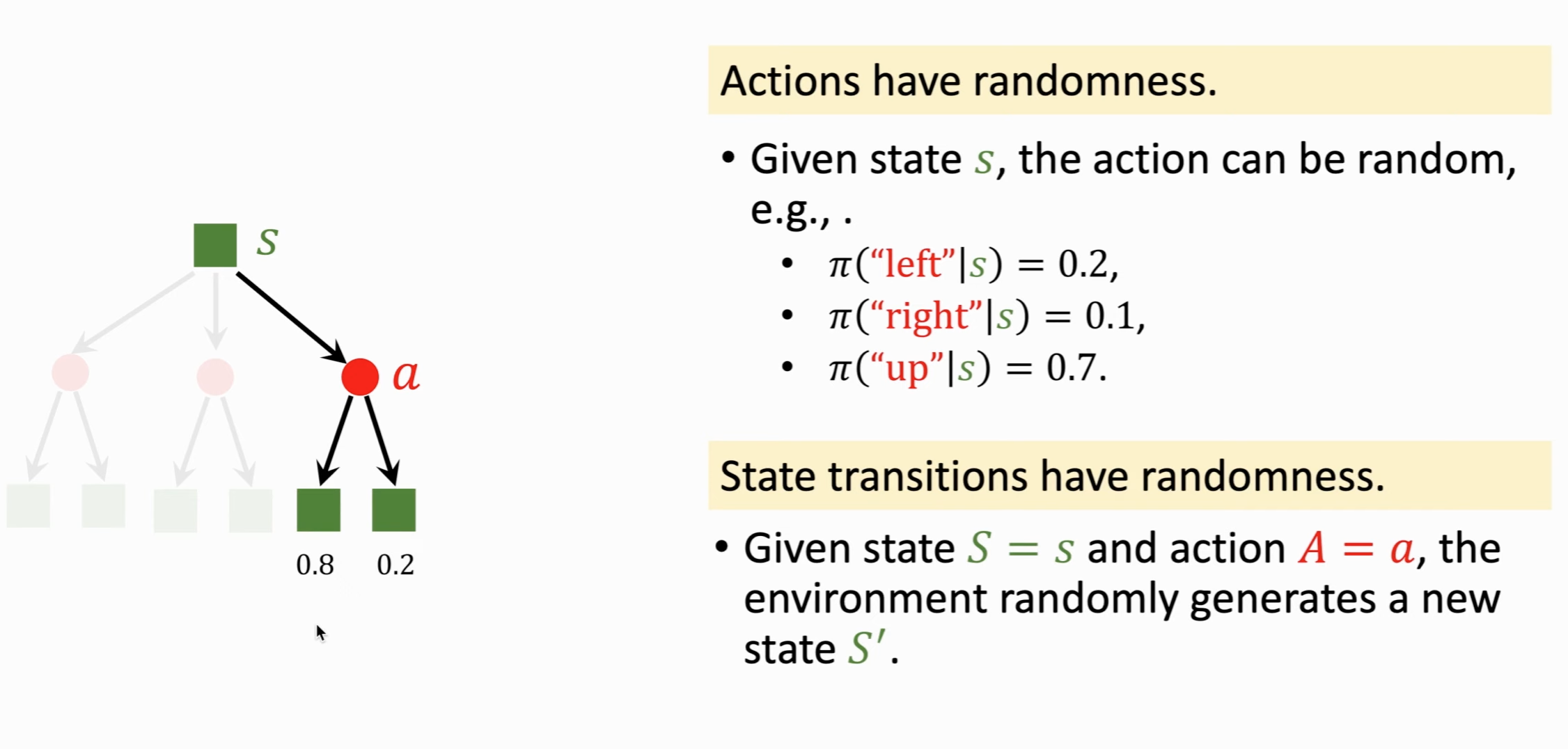
策略(policy, ):根据观测到的状态作出决策,控制智能体的运动
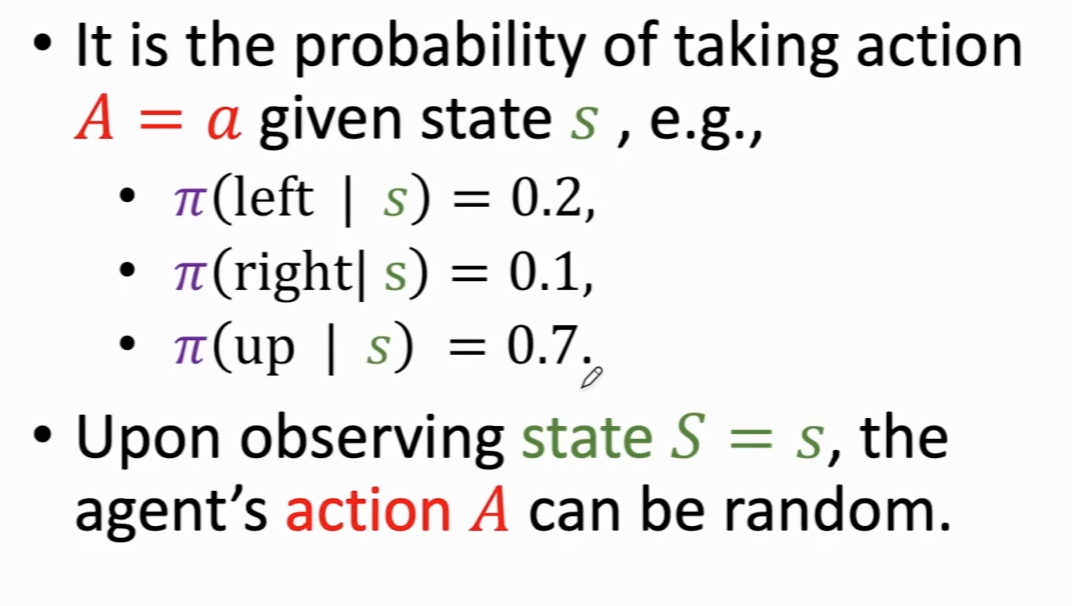
为什么要随机?博弈场景,确定的动作会让别人赢,因此policy最好是概率密度函数,action是随机抽样得到的
奖励(reward):需要自己定义,对结果影响大。强化学习目标:获得奖励总和尽可能高。
状态转移(state transition):当前状态下做一个动作,会转移到新的状态。可以是确定的,也可以是随机的(随机性从环境中来)。
状态转移函数:
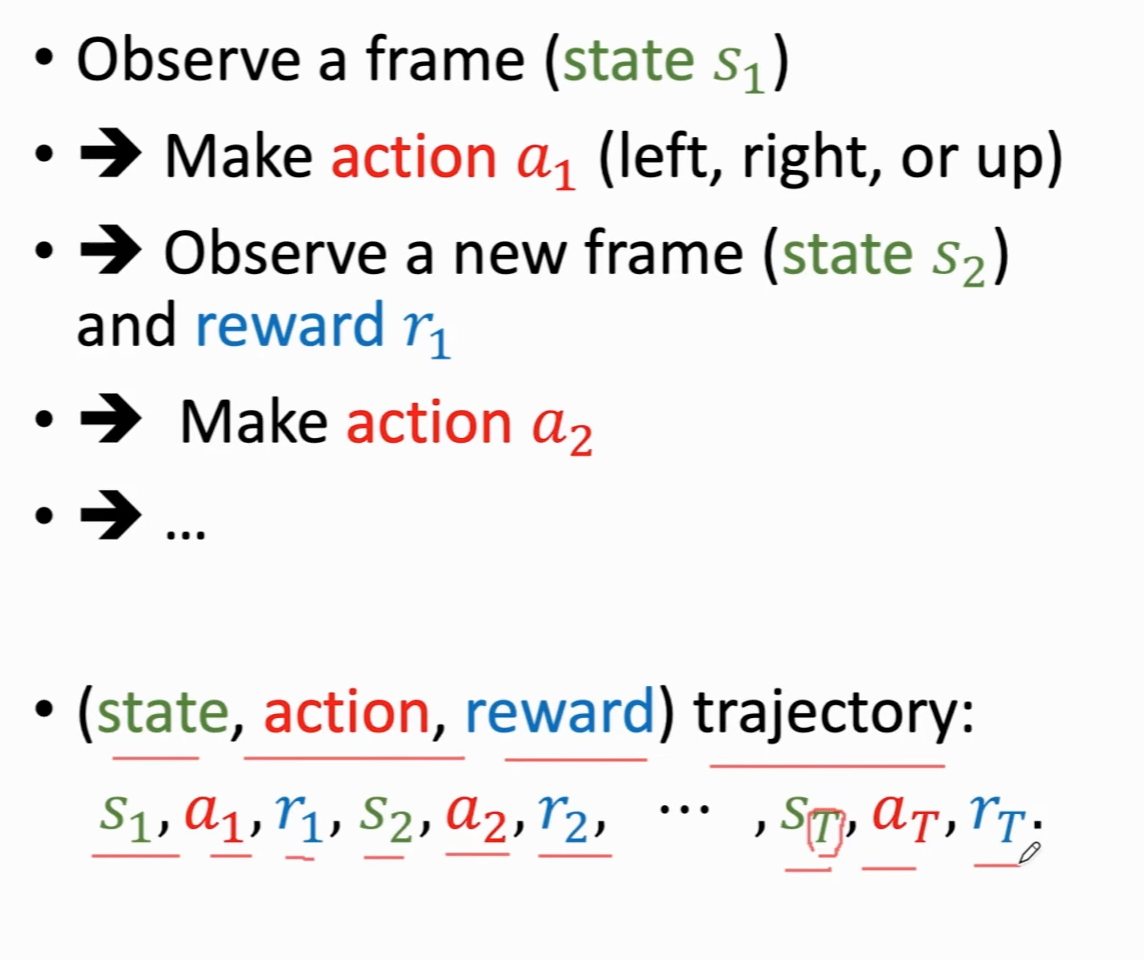
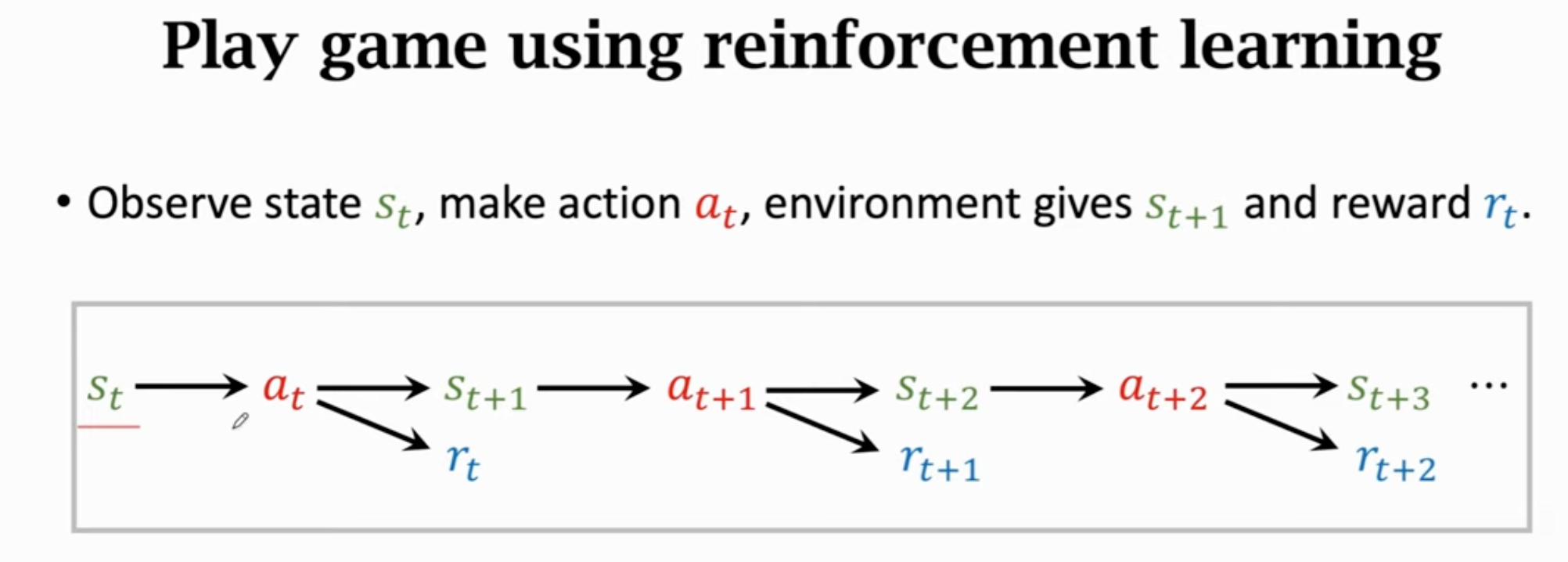
agent与环境交互:
强化学习中的随机性:
通过强化学习玩游戏:
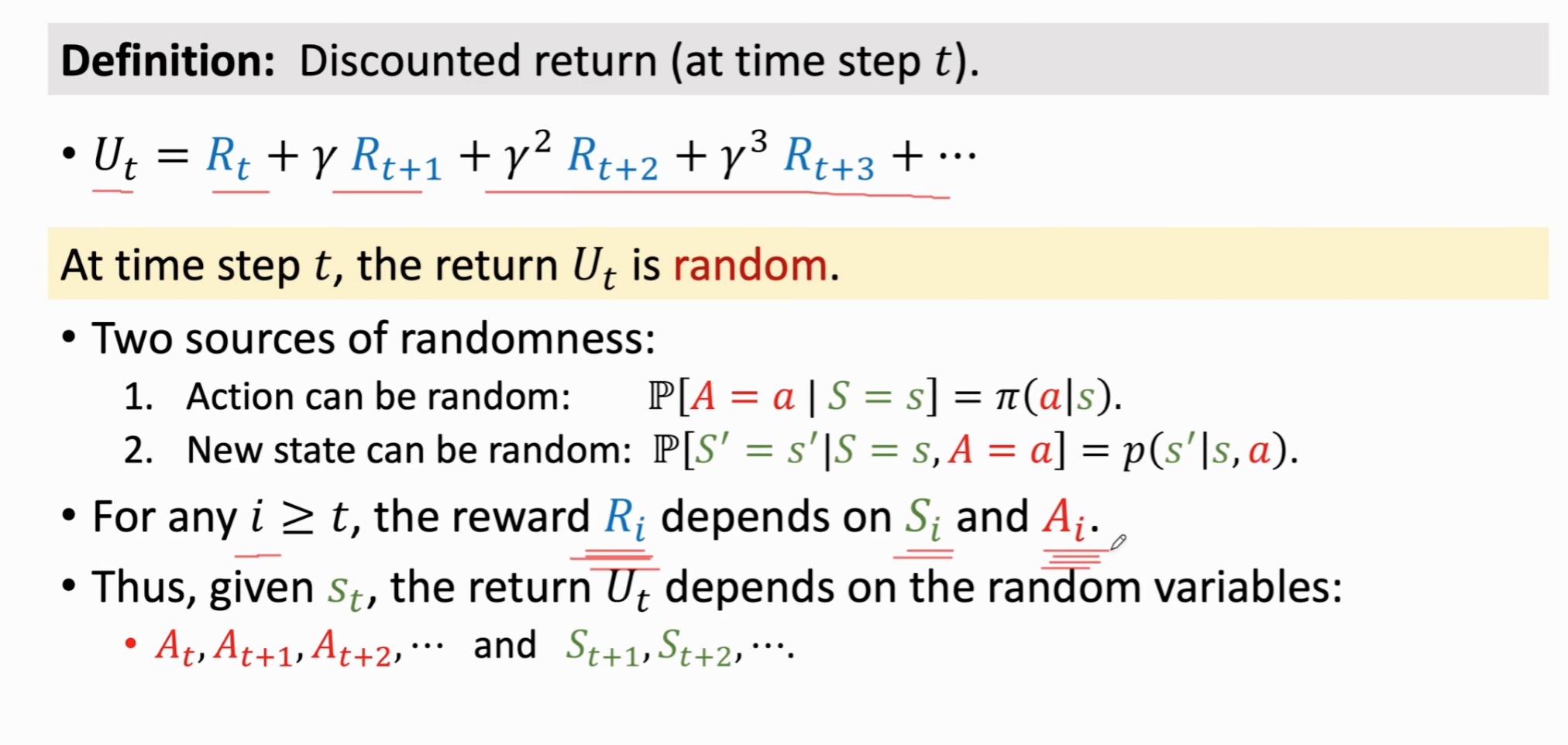
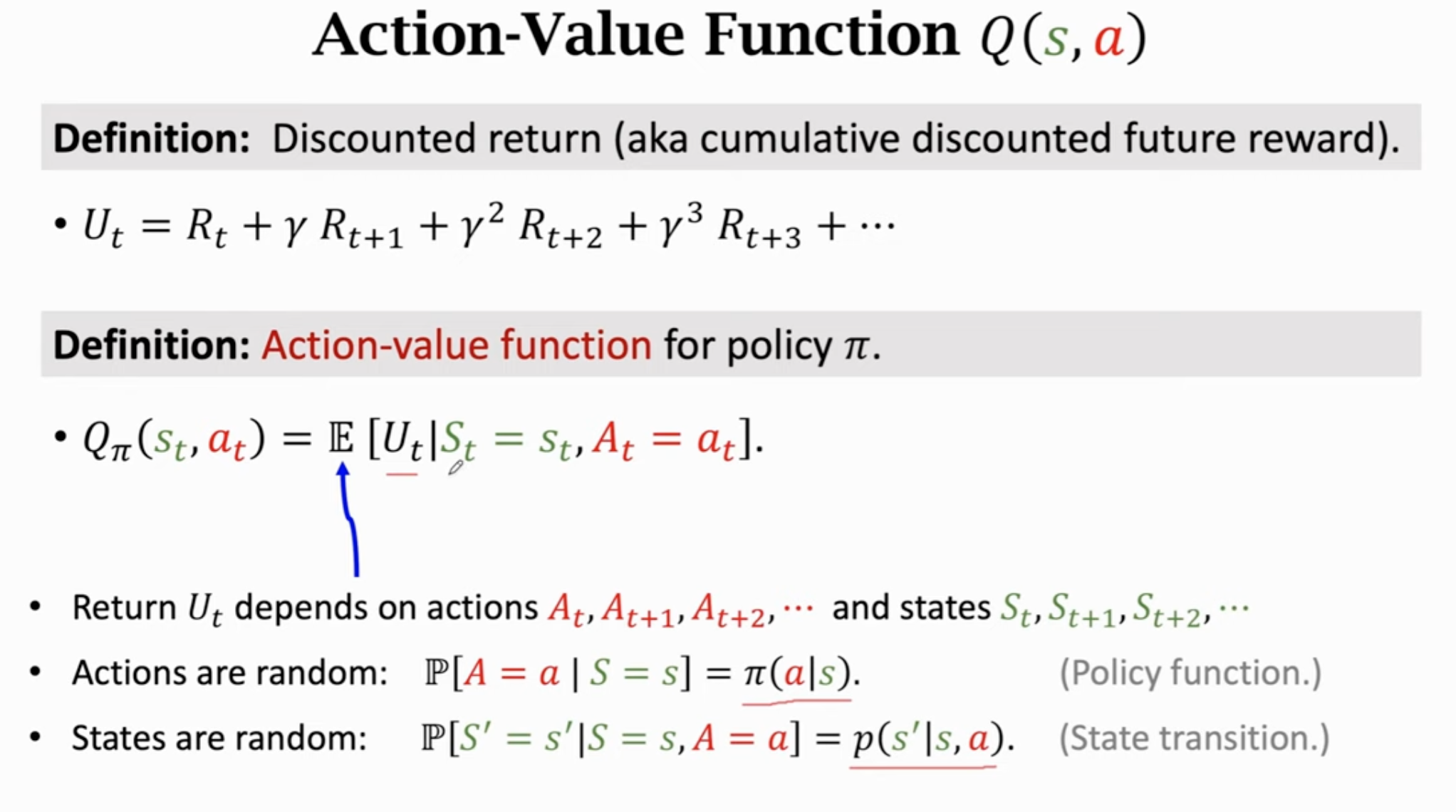
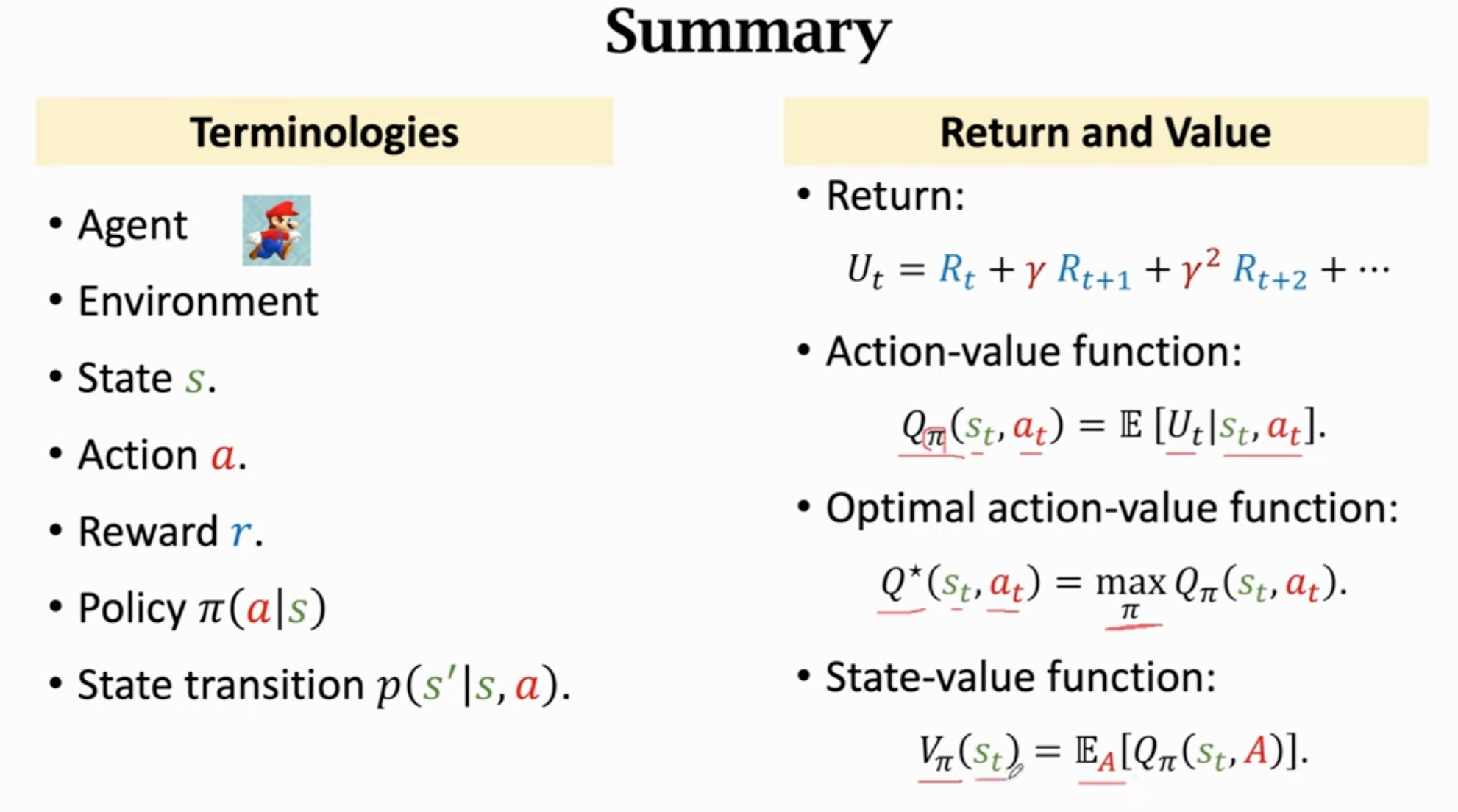
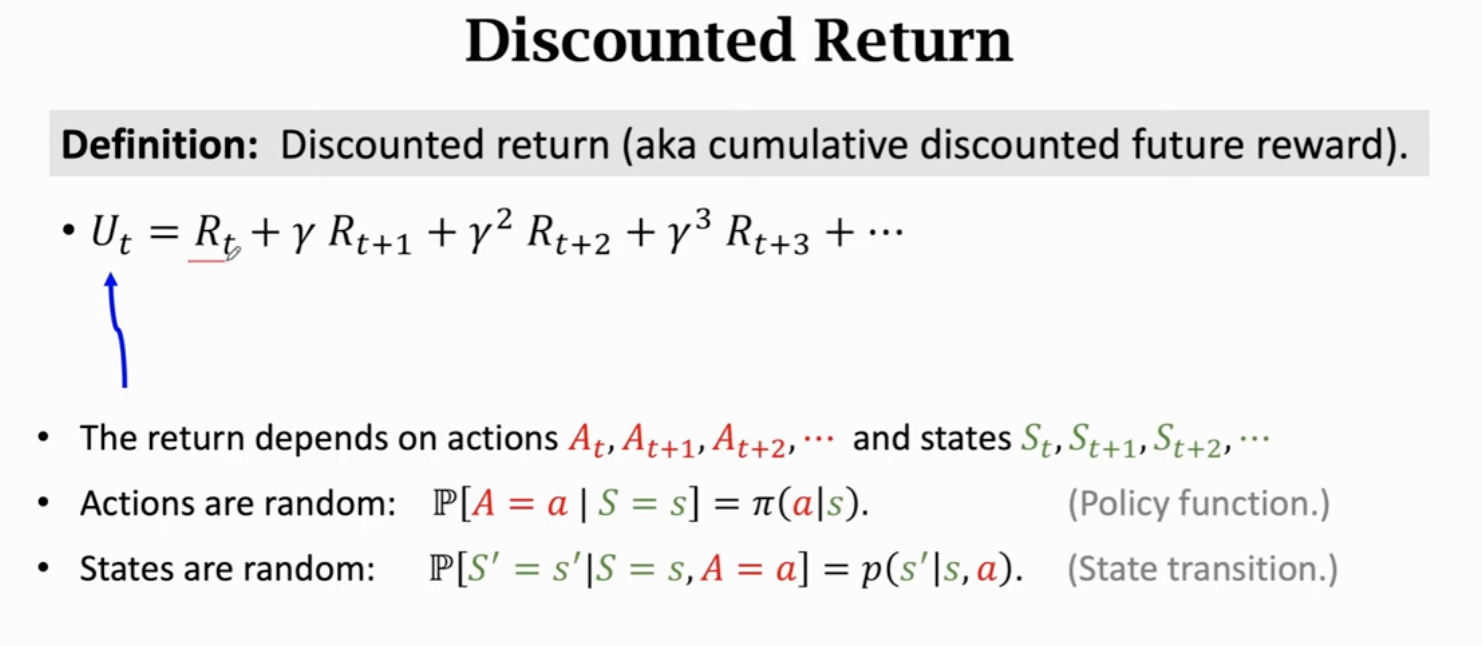
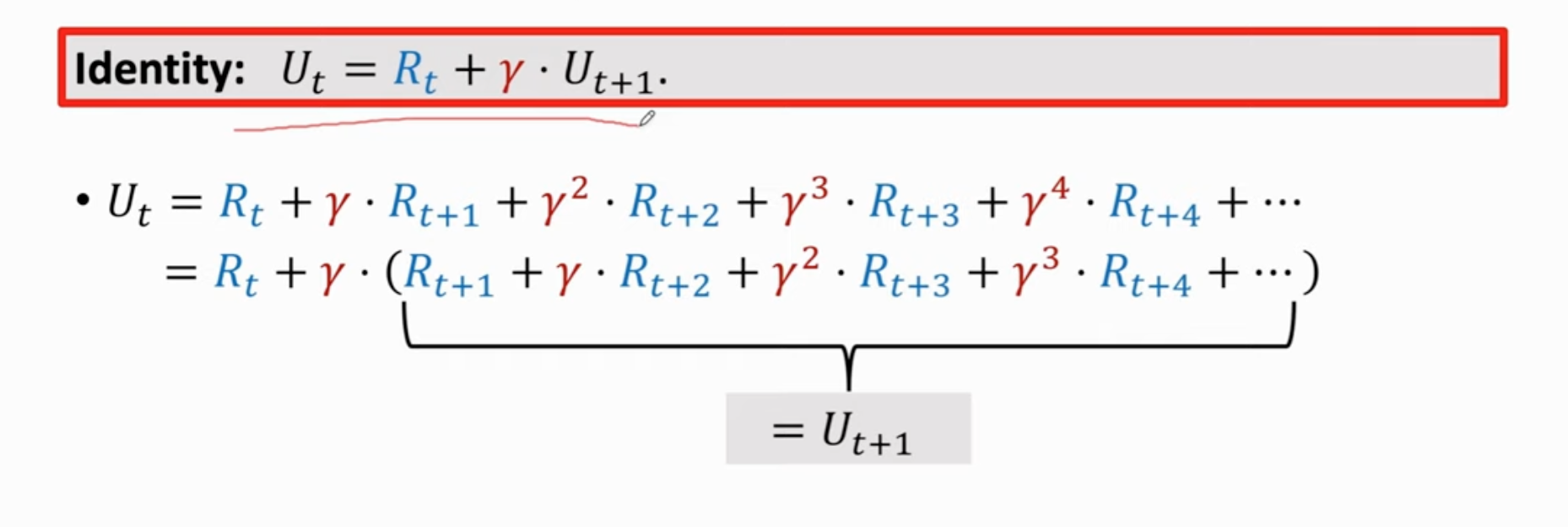
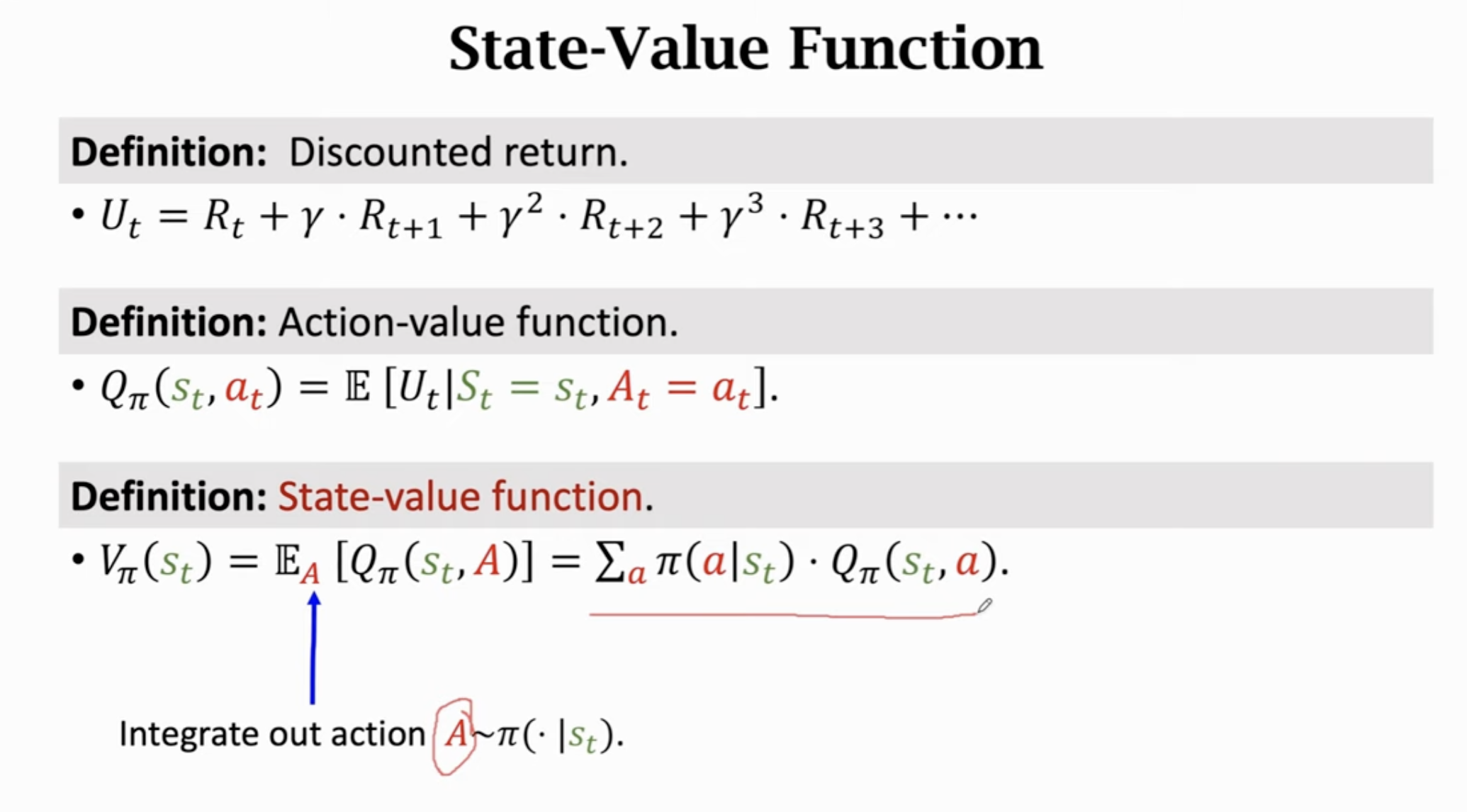
回报(return):未来的累计奖励
和同样重要吗?不
折扣回报(discounted return):为折扣率(可调节的超参数)。
回报的随机性:假设游戏结束,奖励都观测到了,为具体的数值,则用小写字母表示;如果t时刻游戏还没有结束,奖励还没被观测到,就用大写字母表示,折扣回报用大写字母表示。
依赖于:
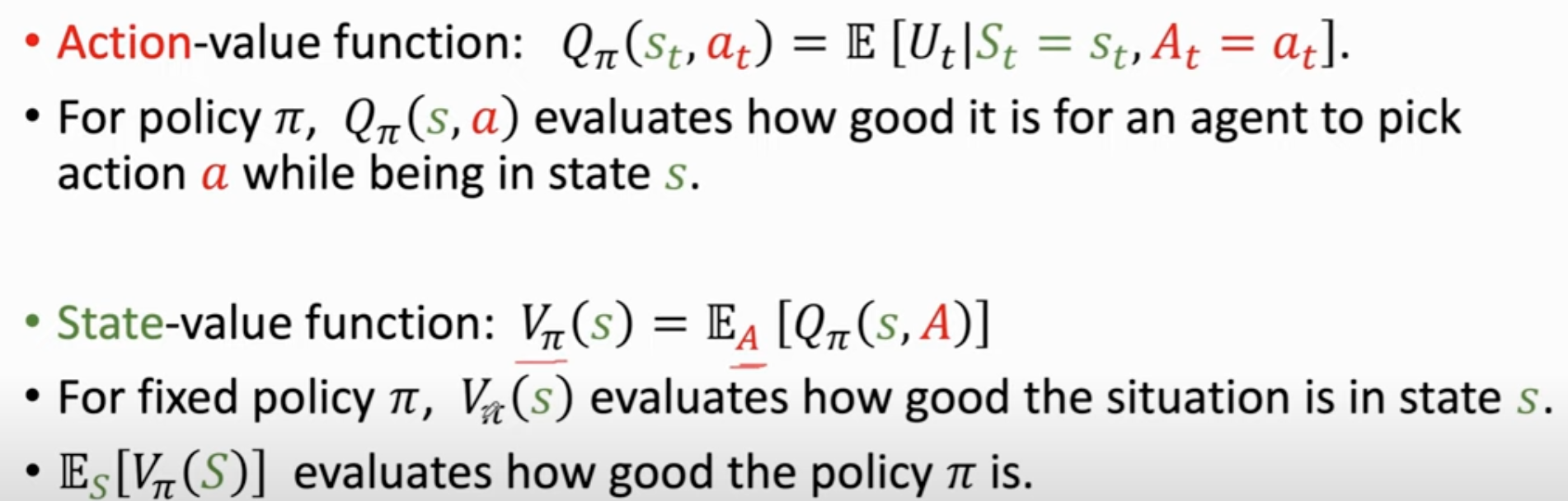
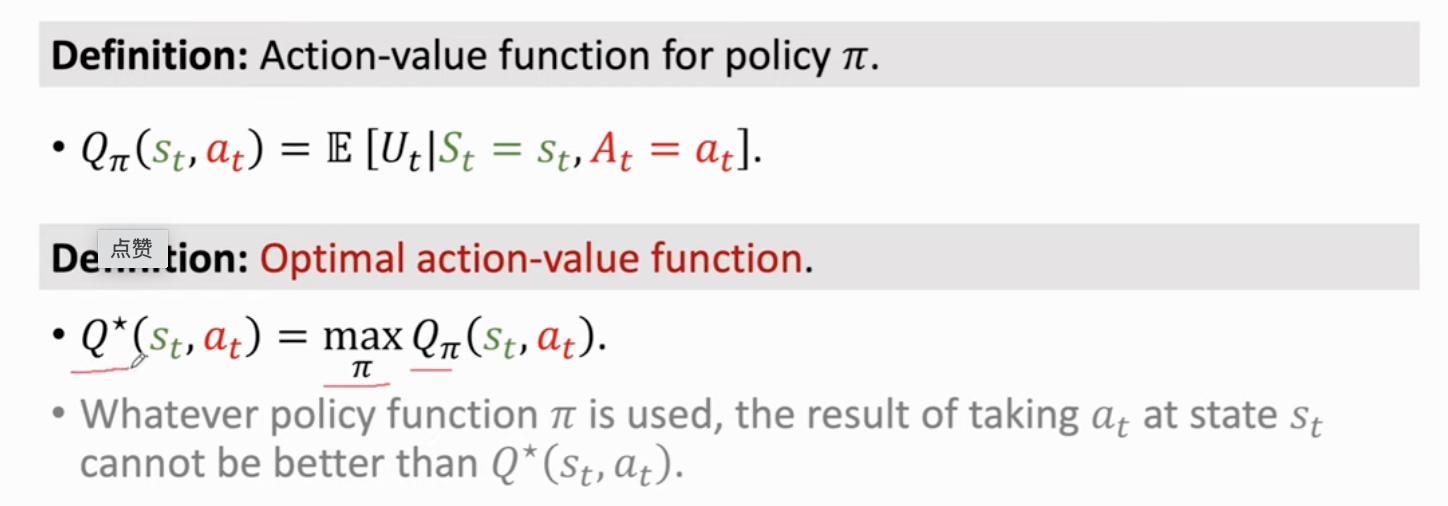
动作价值函数 :
,除了和(观测到),未来其它的动作和状态都被积掉了;此外还依赖policy函数,可以知道对于这个policy函数,当前哪个动作好/不好
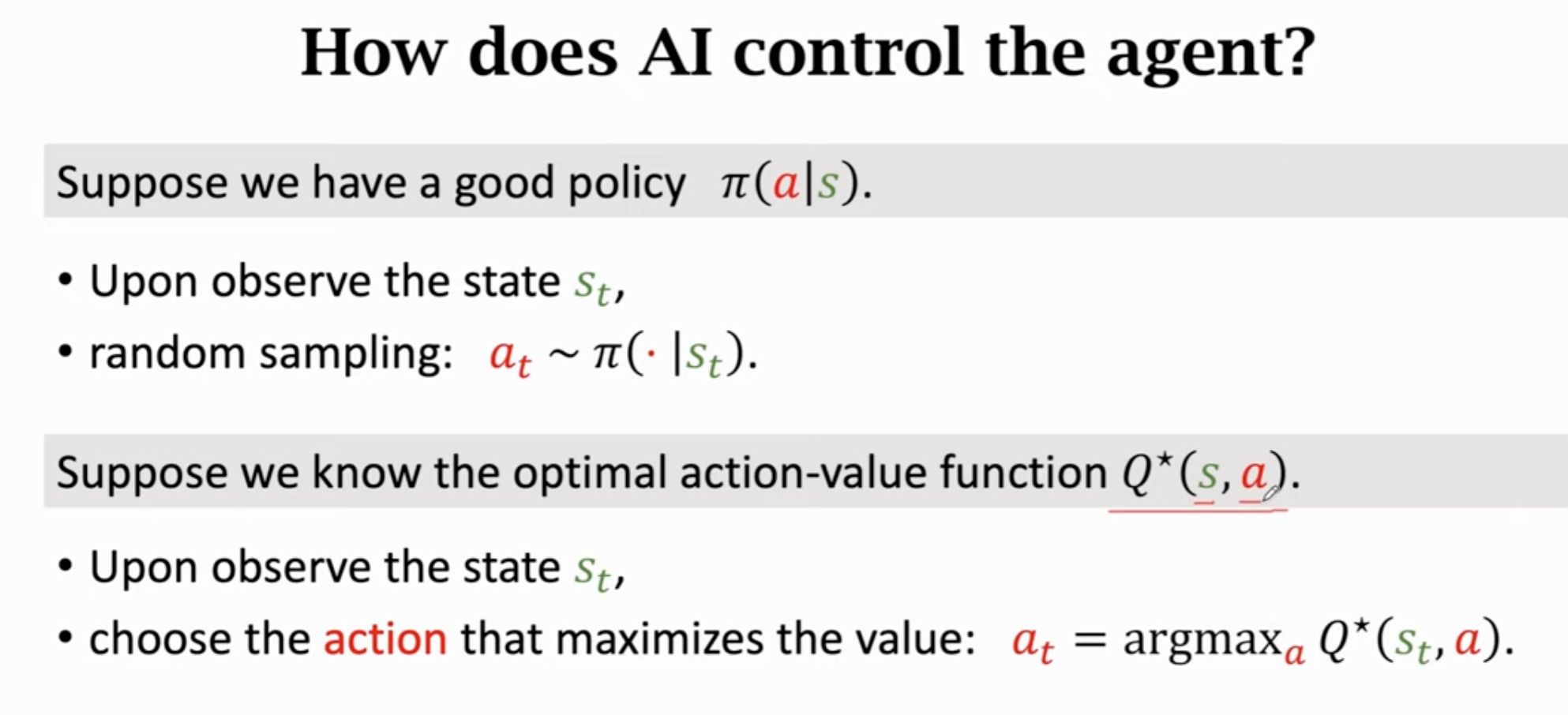
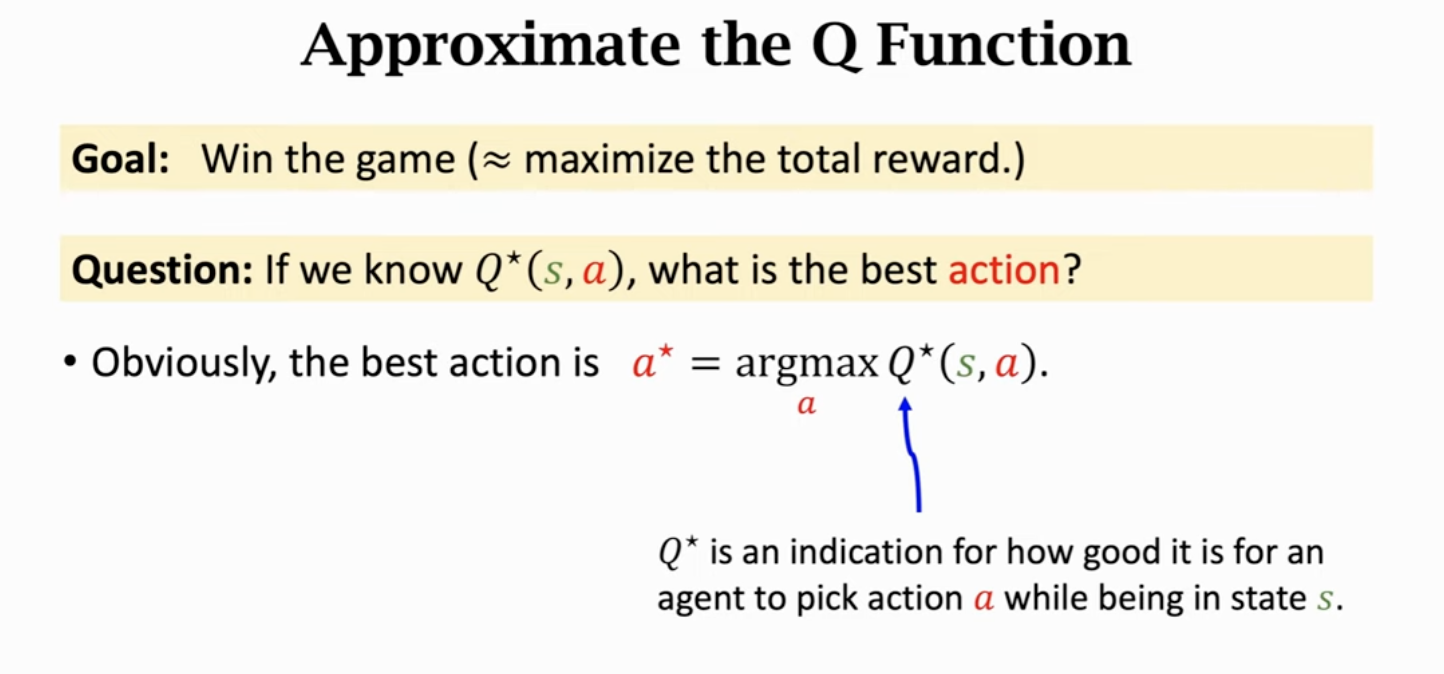
最优动作价值函数:可以对动作进行评价。

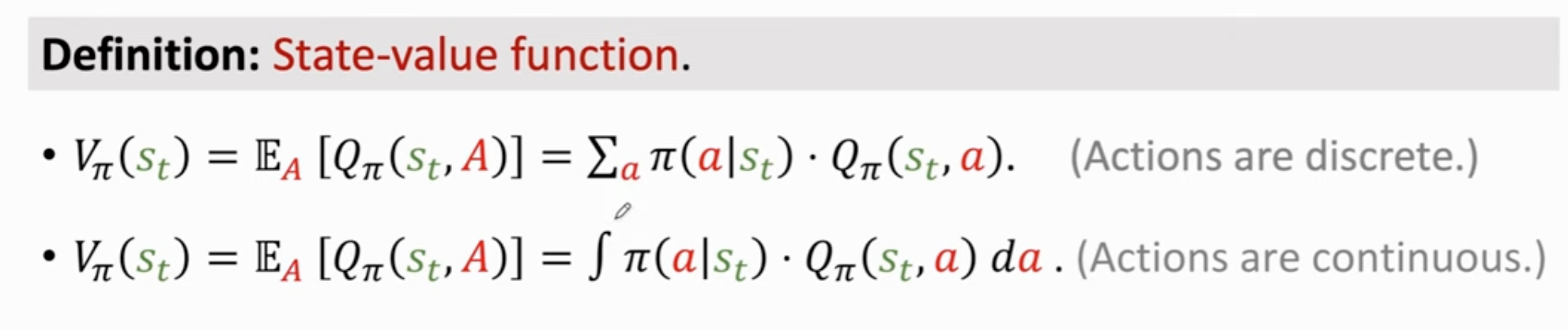
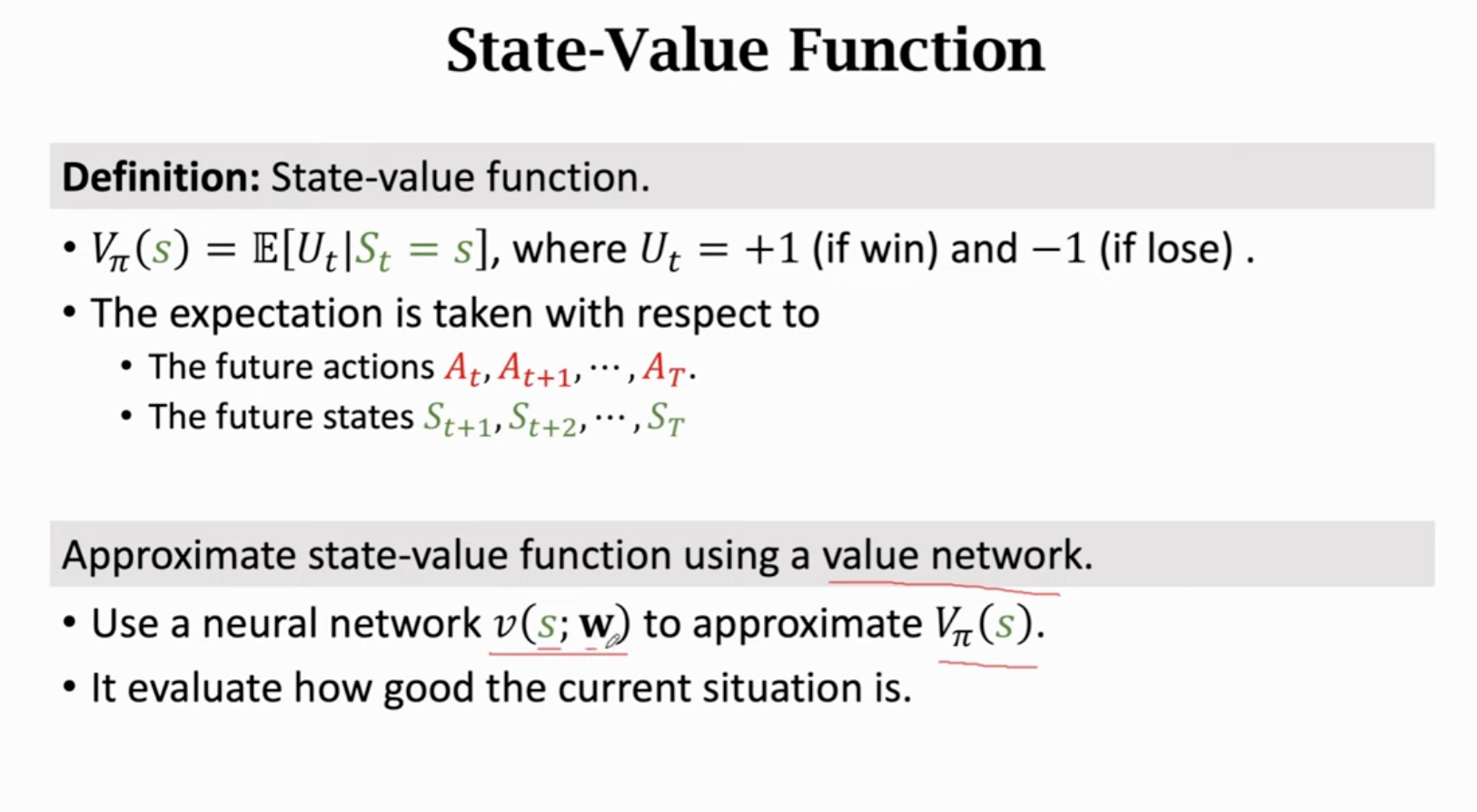
状态价值函数:判断当前状态好不好
如何用ai控制智能体?
summary
2 基于价值的强化学习
回顾:
可以指导agent做决策,不受策略函数的影响。
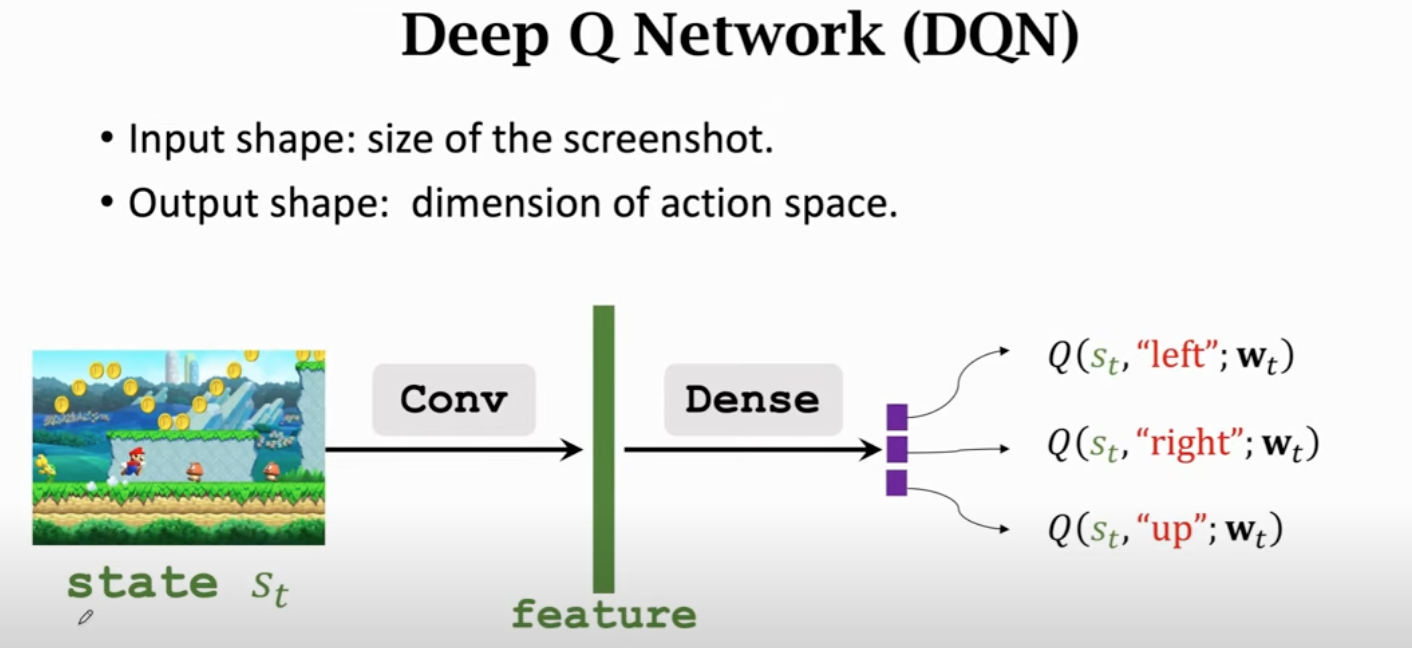
Deep Q-Network (DQN)
利用神经网络近似函数。

为神经网络参数。
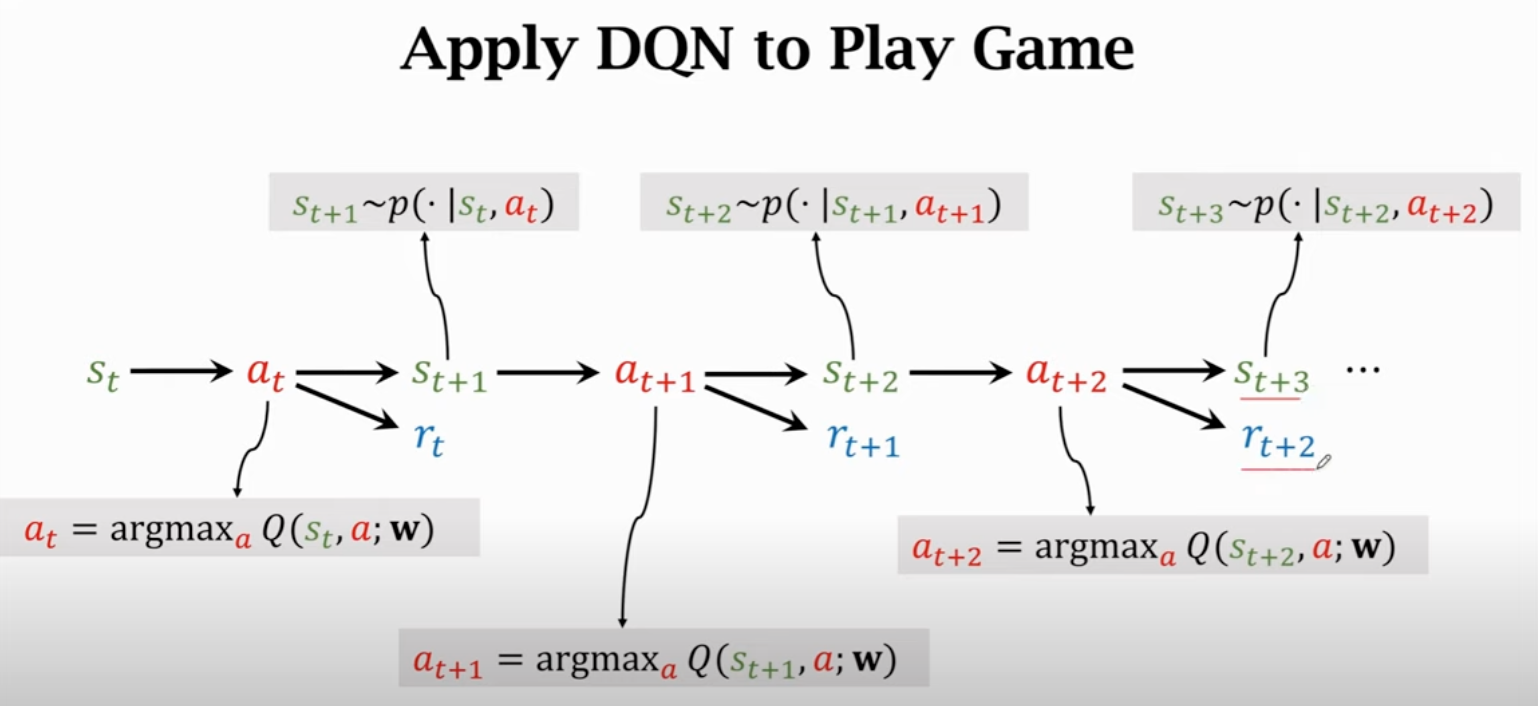
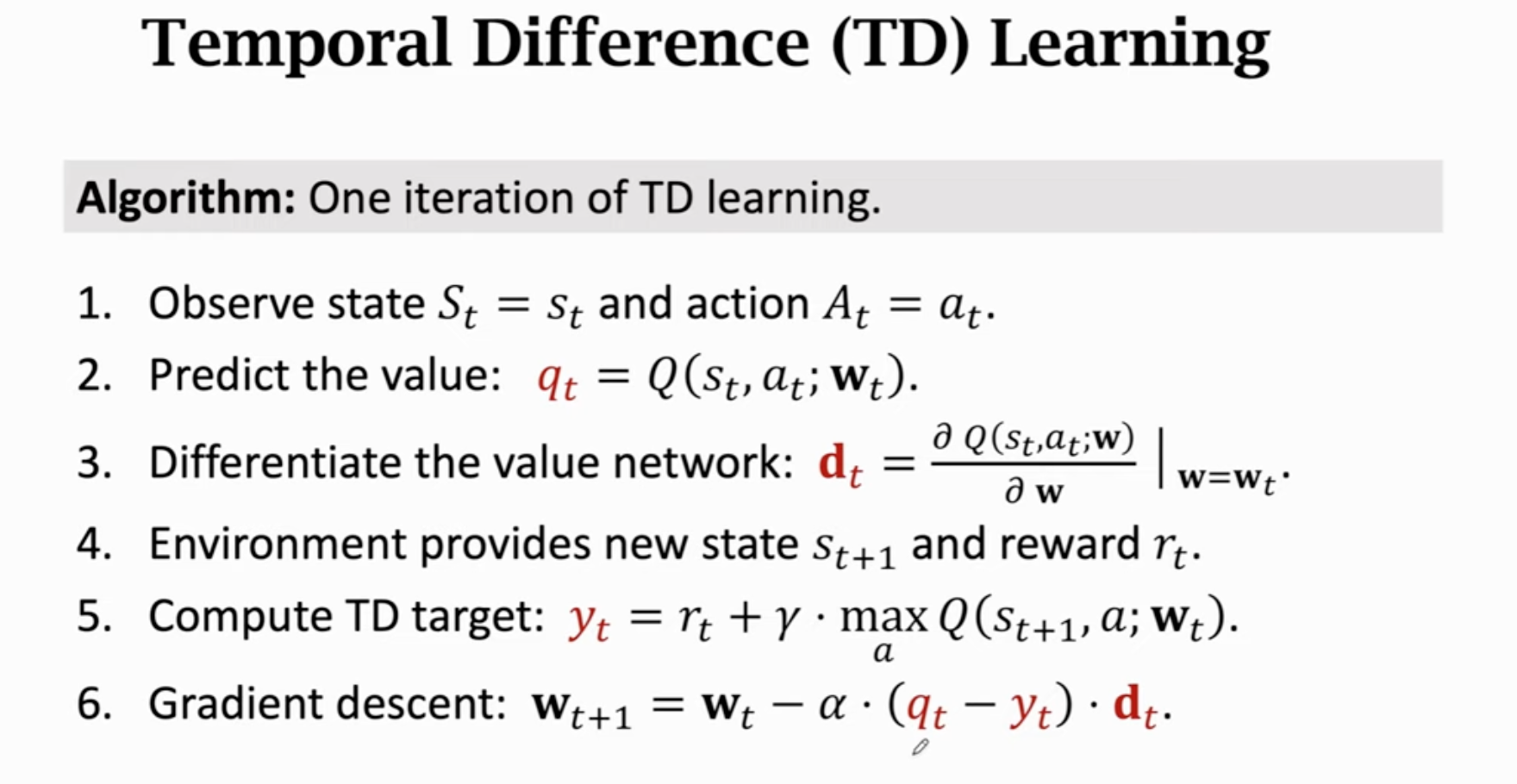
如何训练DQN:Temporal Difference(TD)算法
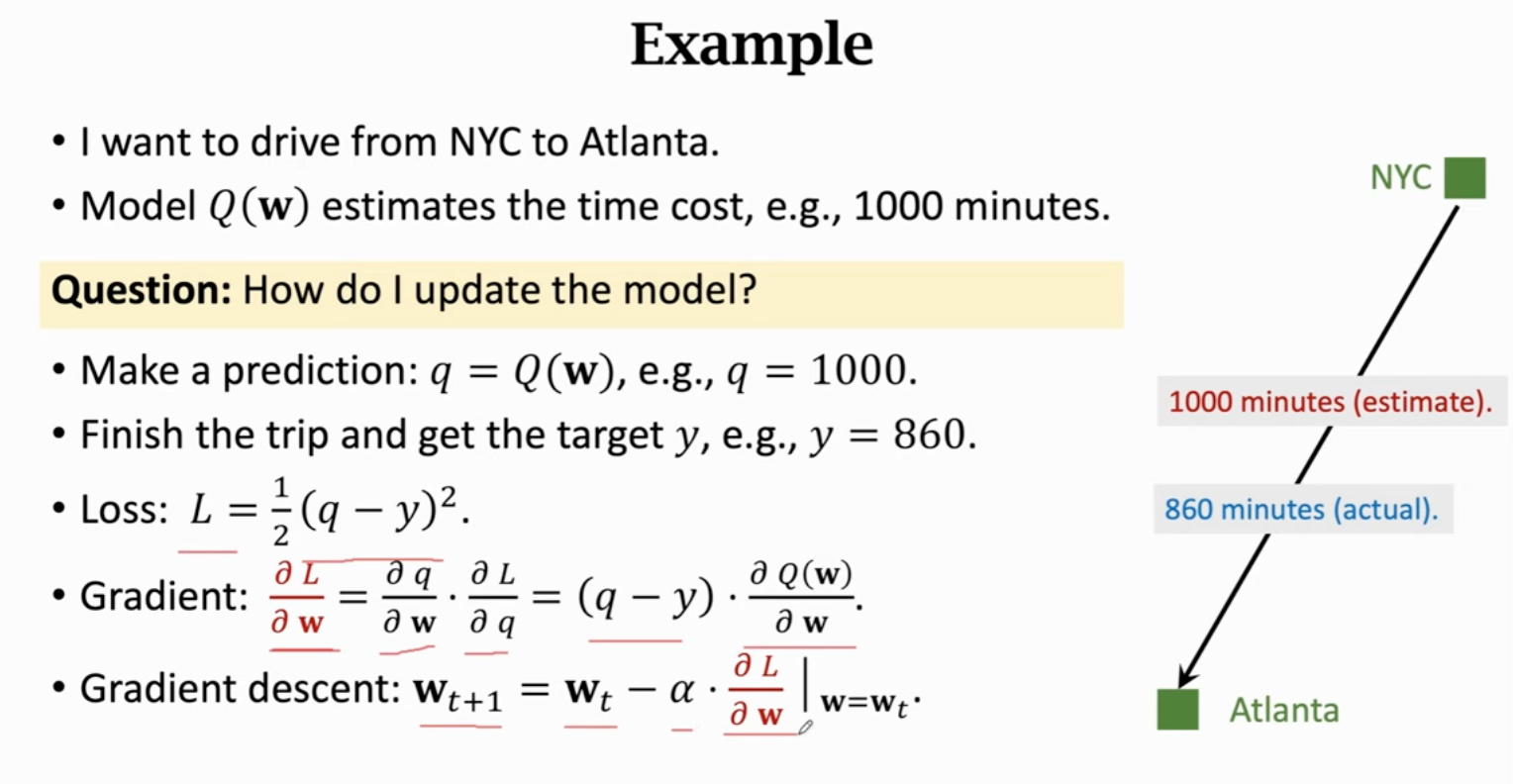
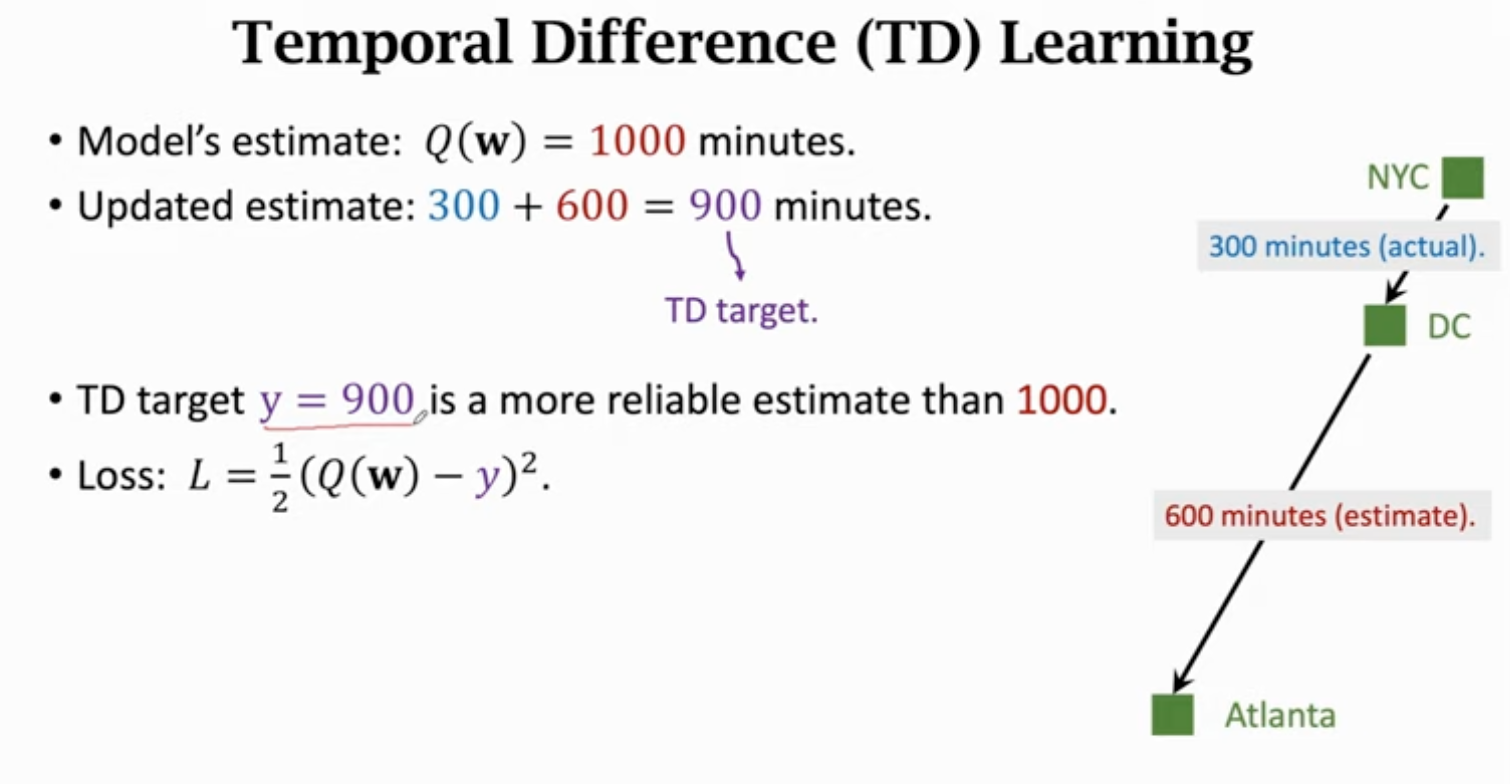
不需要经历整个过程(玩完整个游戏)就能更新模型参数
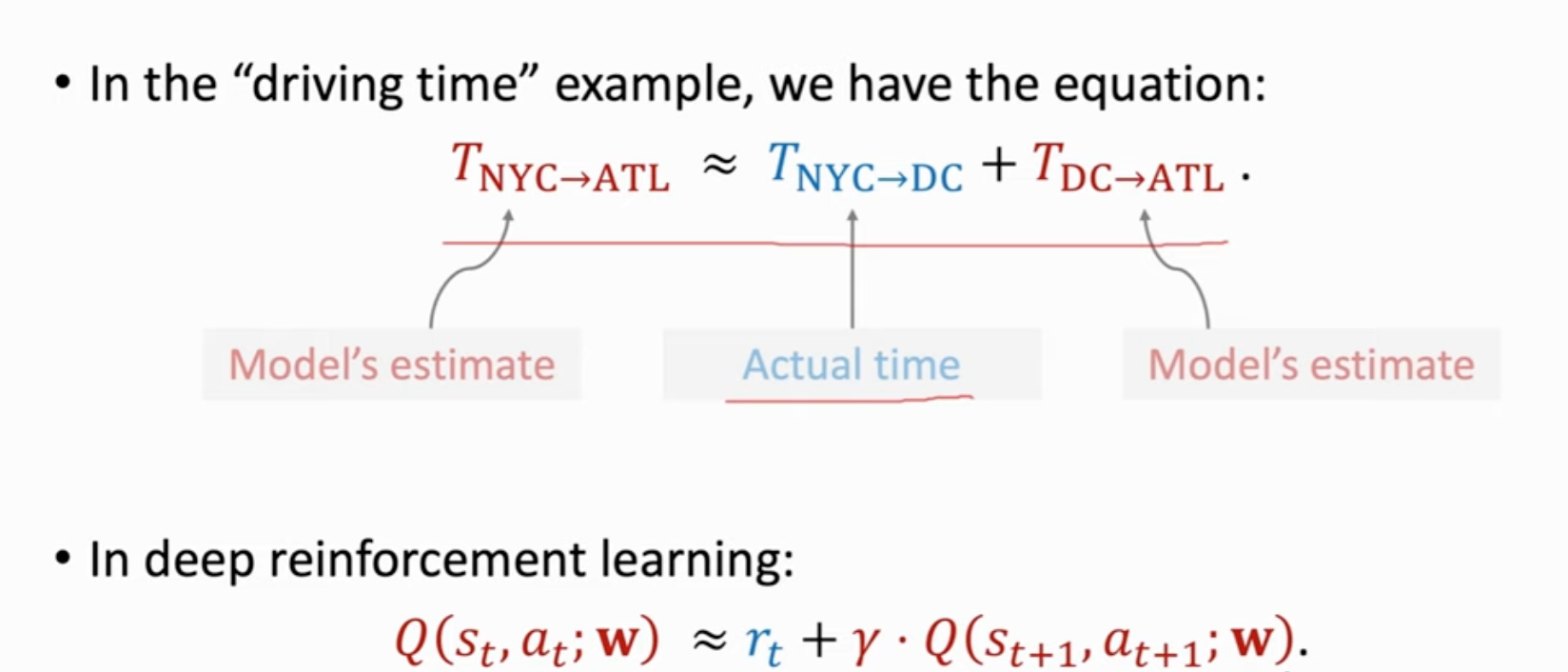
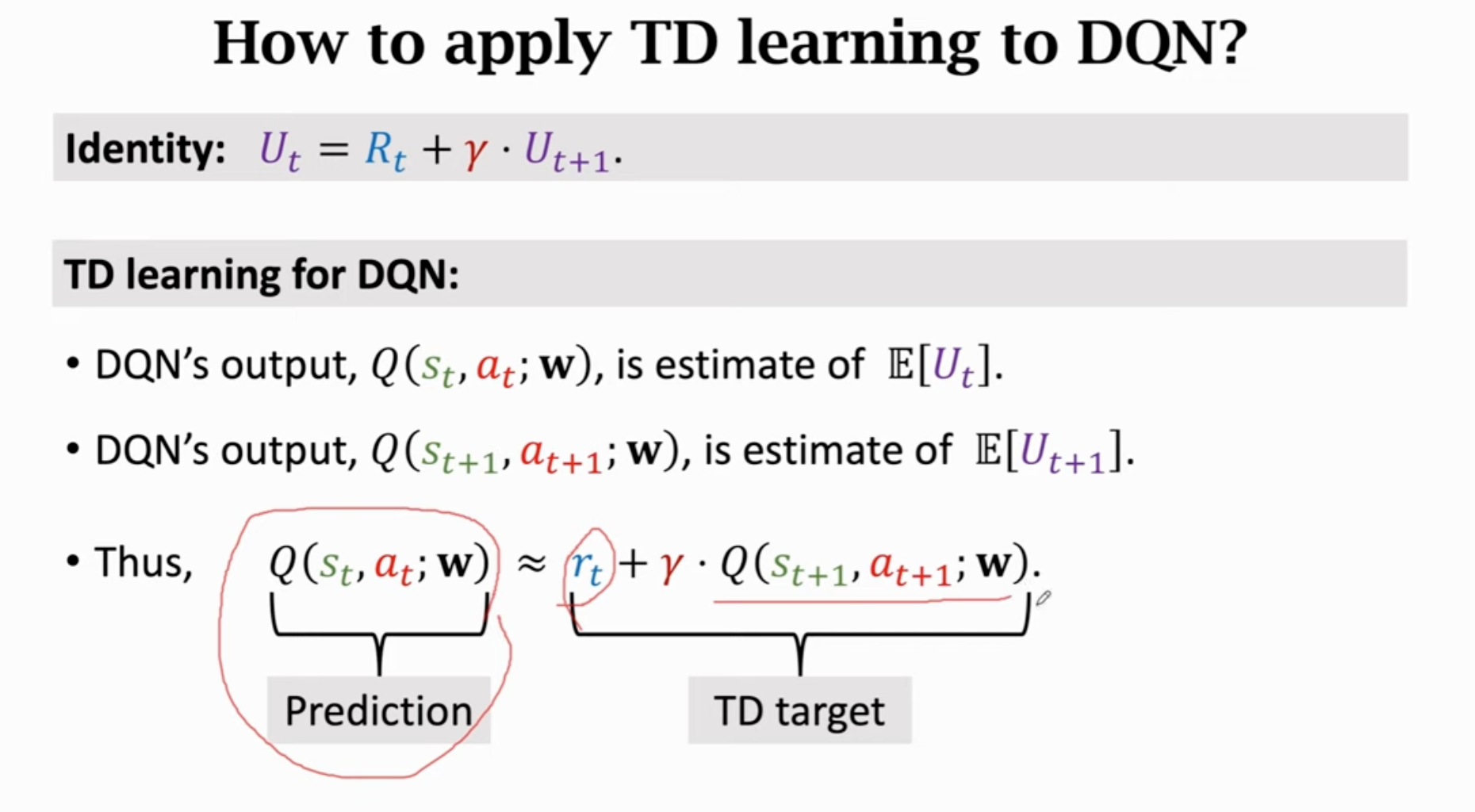
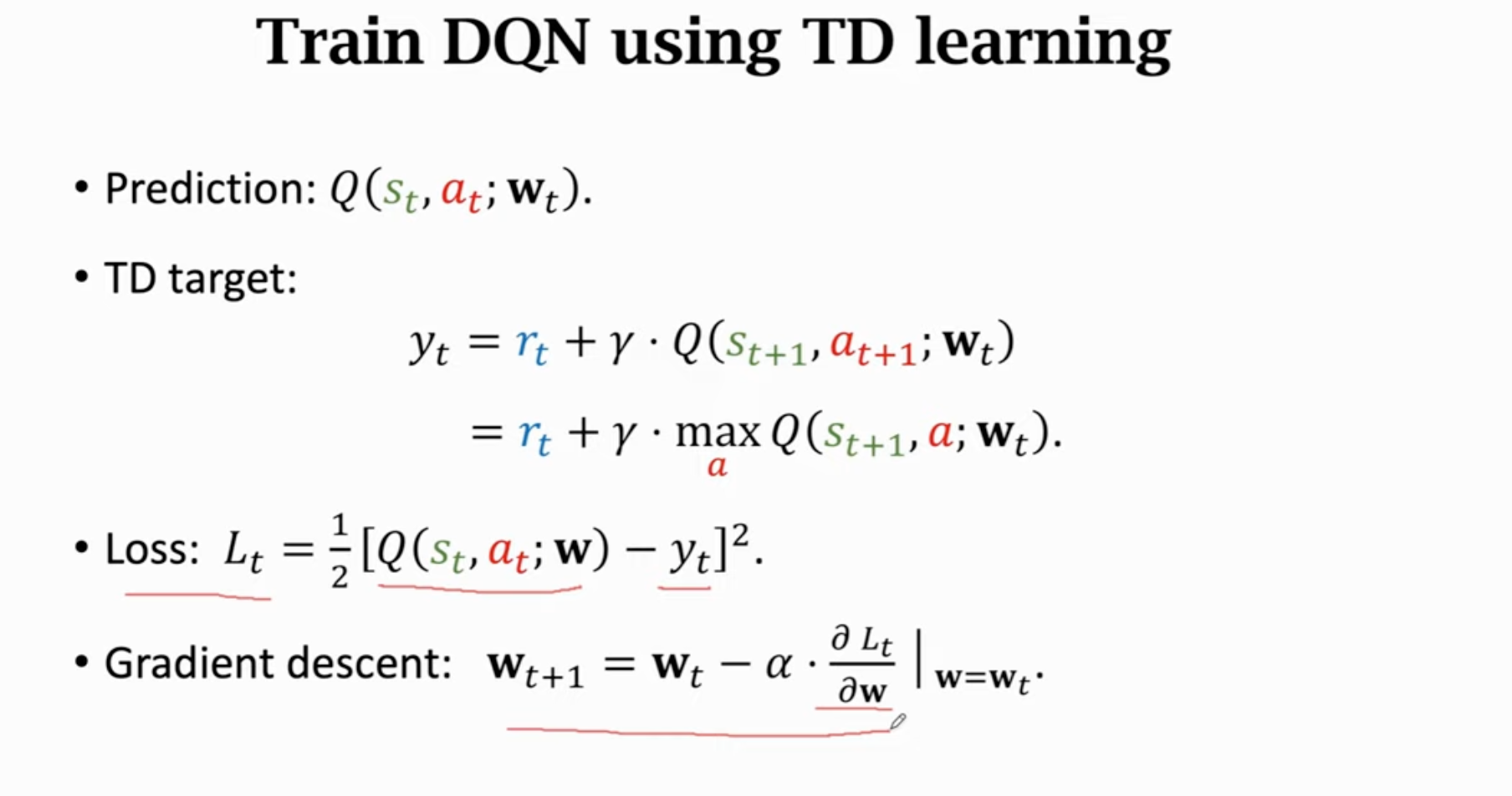
过程:
3 基于策略的强化学习
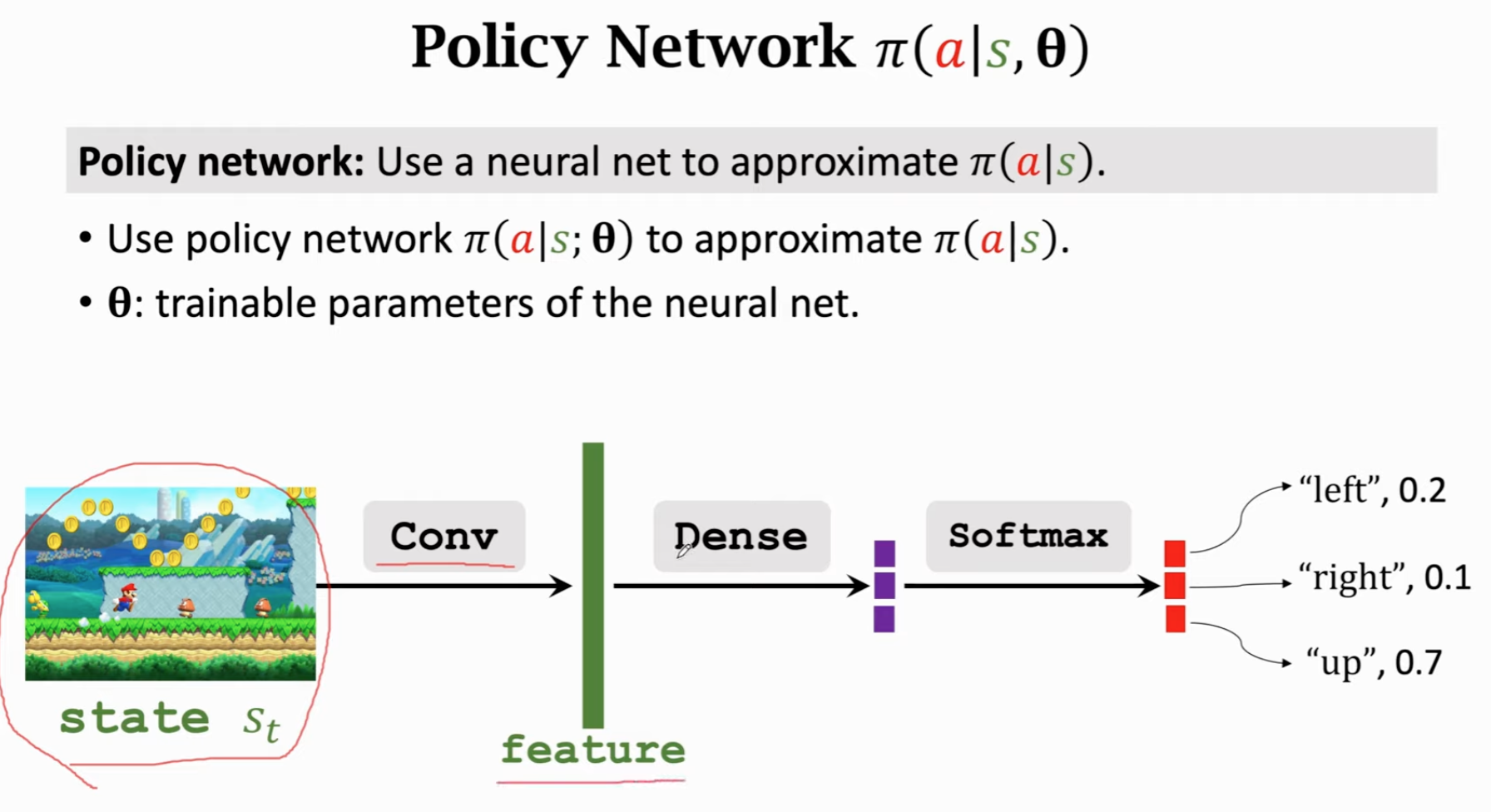
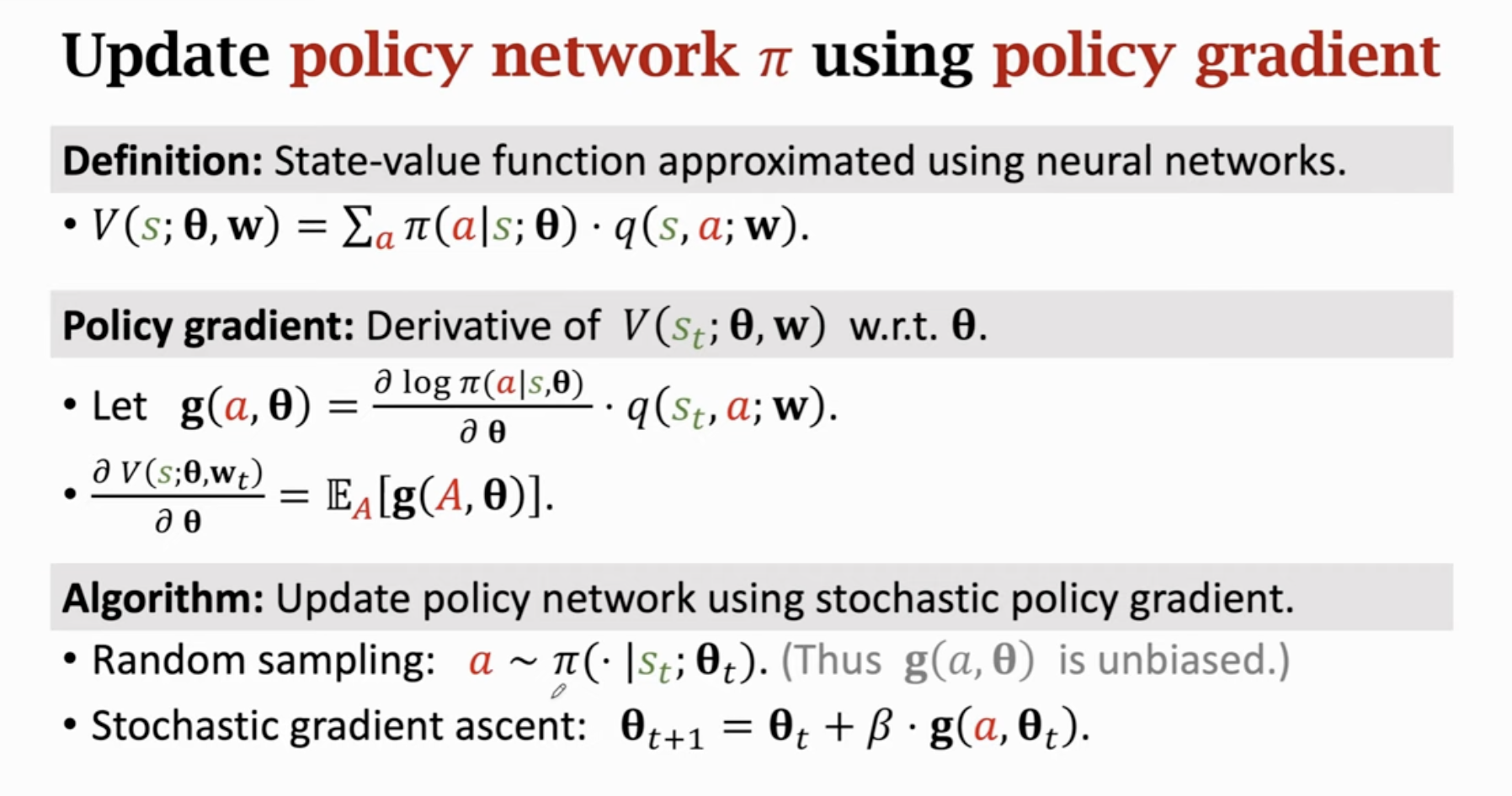
通过神经网络(policy network)近似策略函数,需要用到policy gradient算法。
策略函数:是一个概率密度函数(PDF),需要满足概率密度函数的性质。
关键在于怎么得到这个函数。假如一个游戏状态和动作的数目都很少,可以直接画一个的表,直接把概率算出来即可。但是对于游戏这种场景,无法这样得到策略函数,需要学习一个函数来近似策略函数。
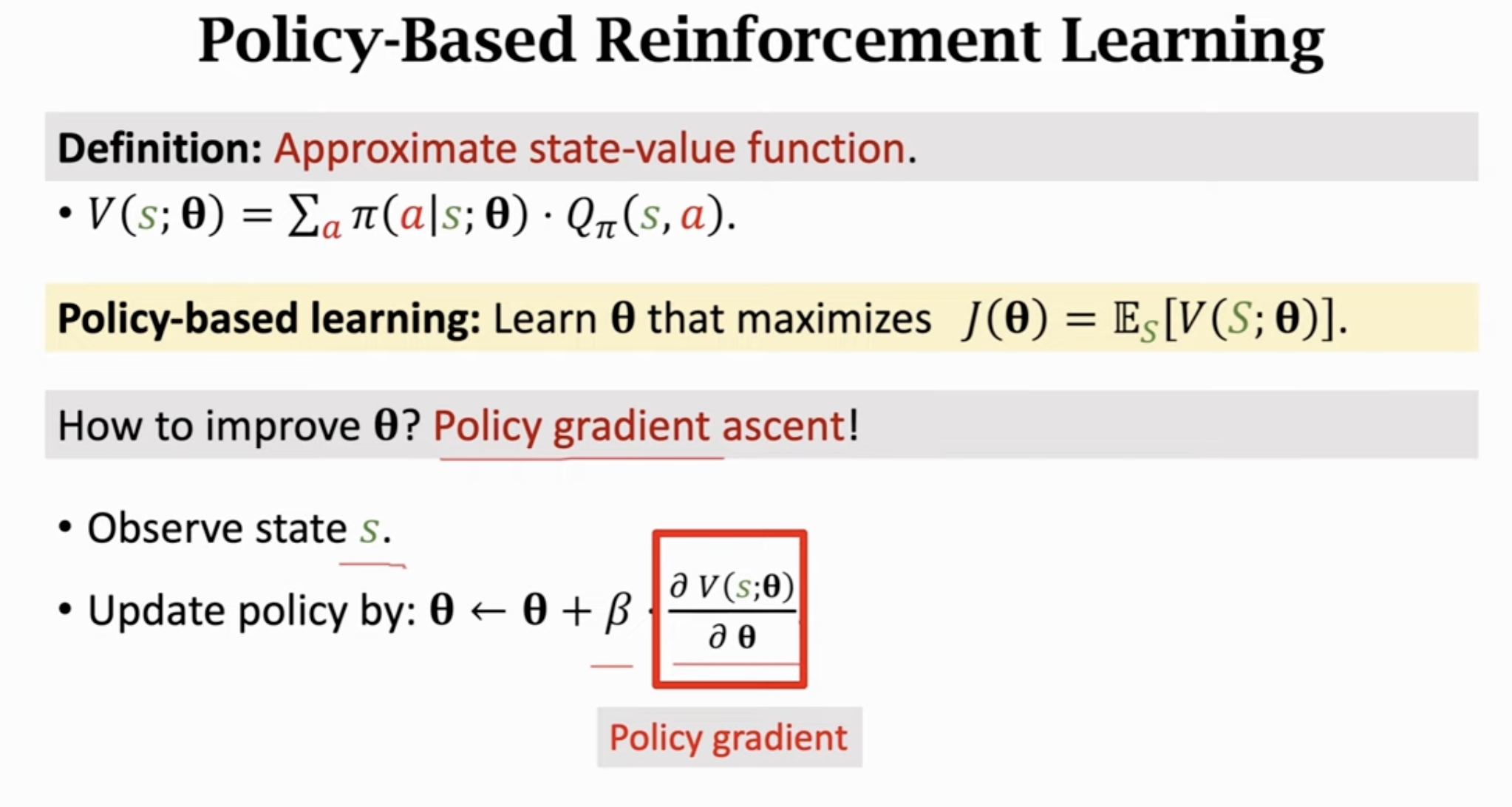
回顾:
这里的被当作随机变量,概率密度函数是,把消掉后只和和有关,可以评价当前状态/策略的好坏。
通过神经网络近似策略网络,进而近似:
随机梯度,随机性来源于
为什么梯度上升?因为想让越来越大
Policy gradient
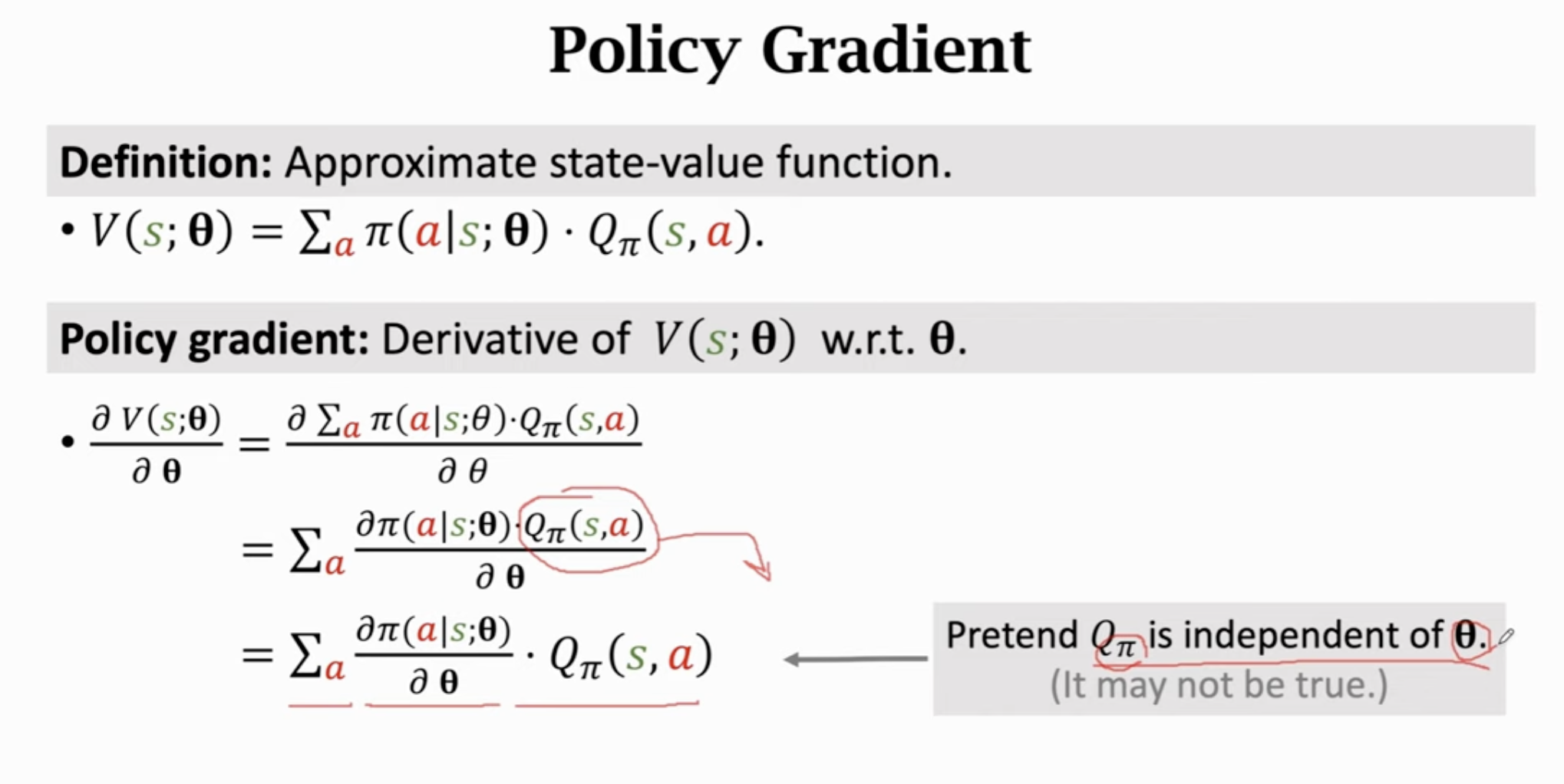
和还是有关的,这里的推导并不严谨。
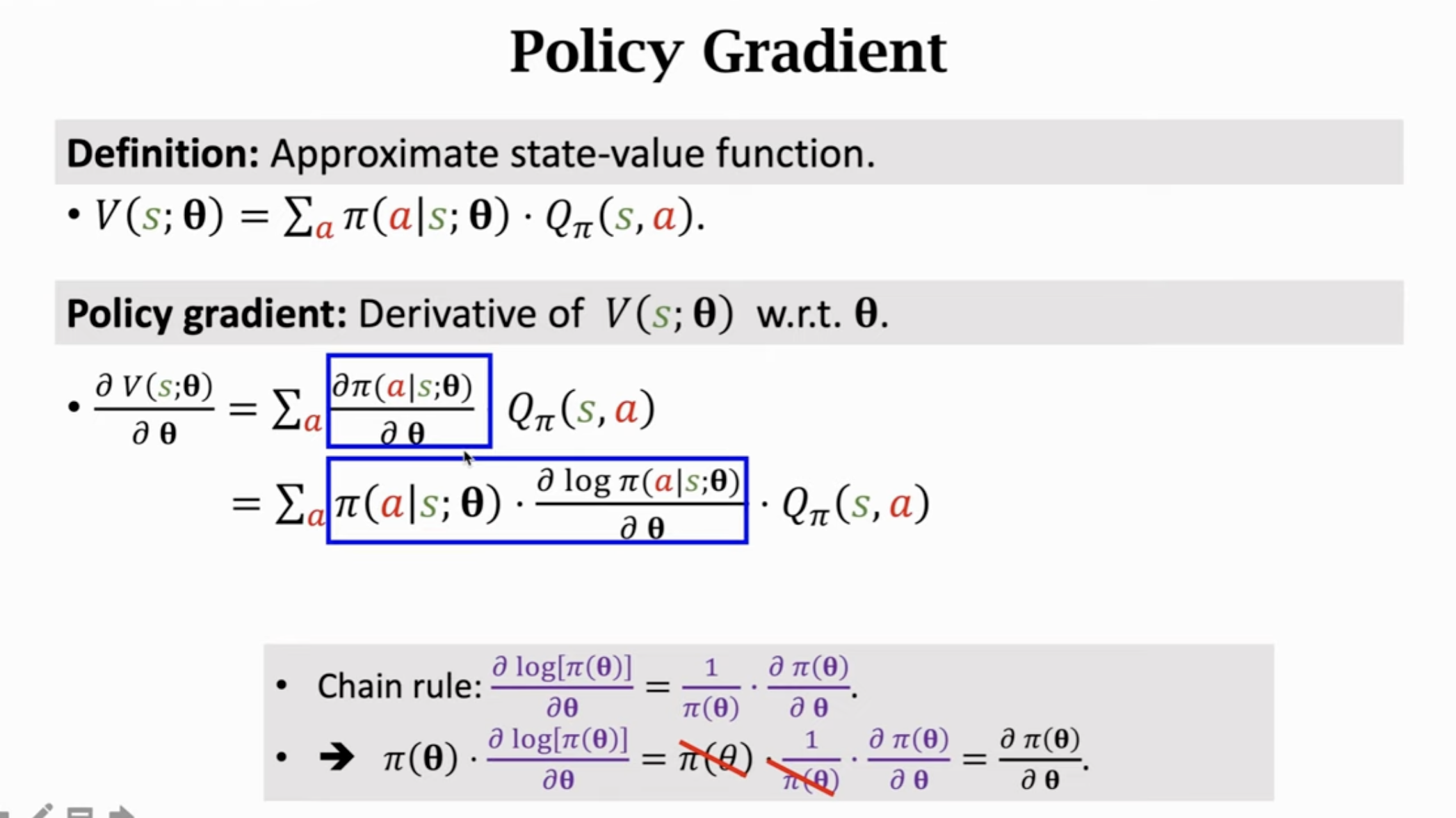
这里之所以这么做是要凑期望的形式?
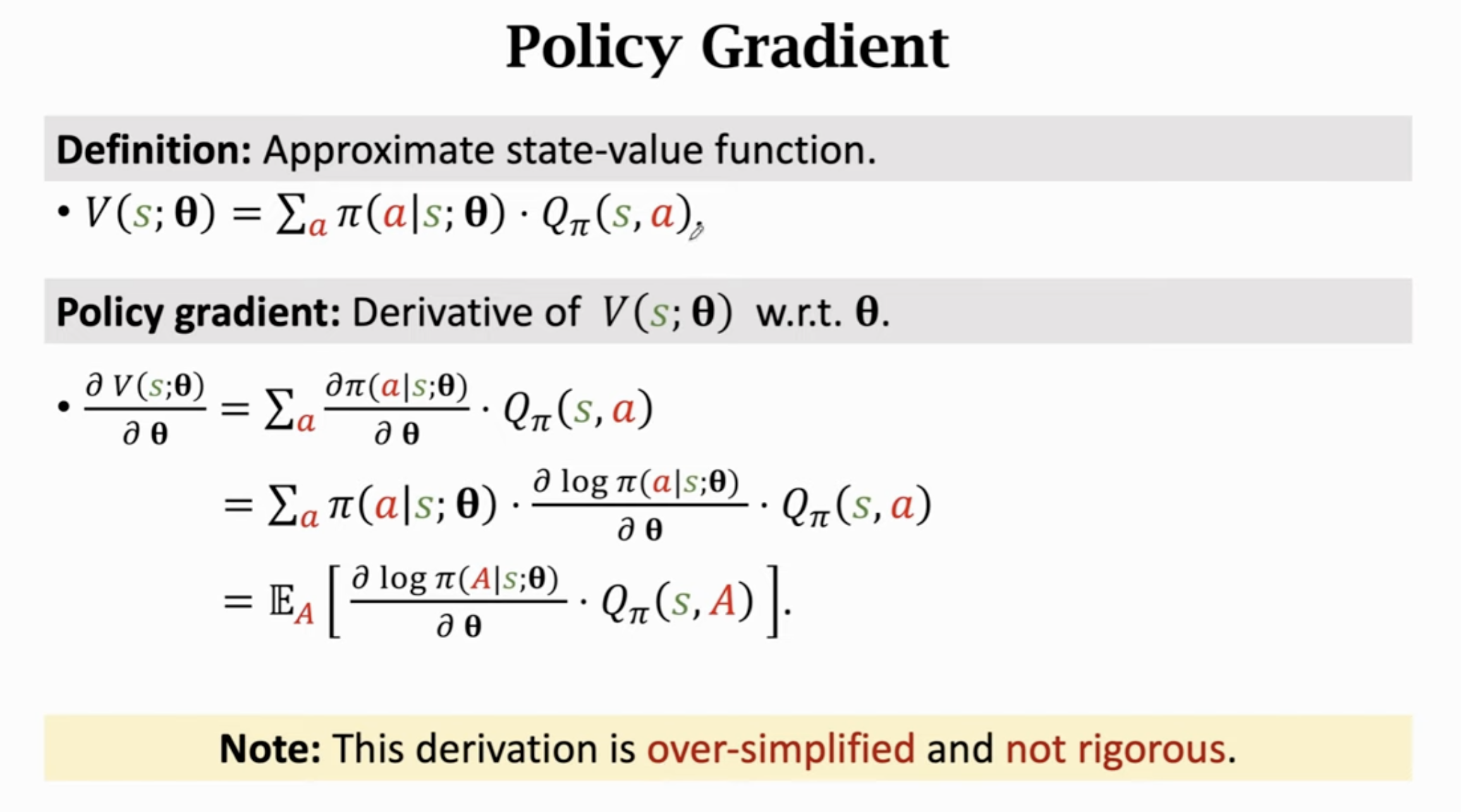
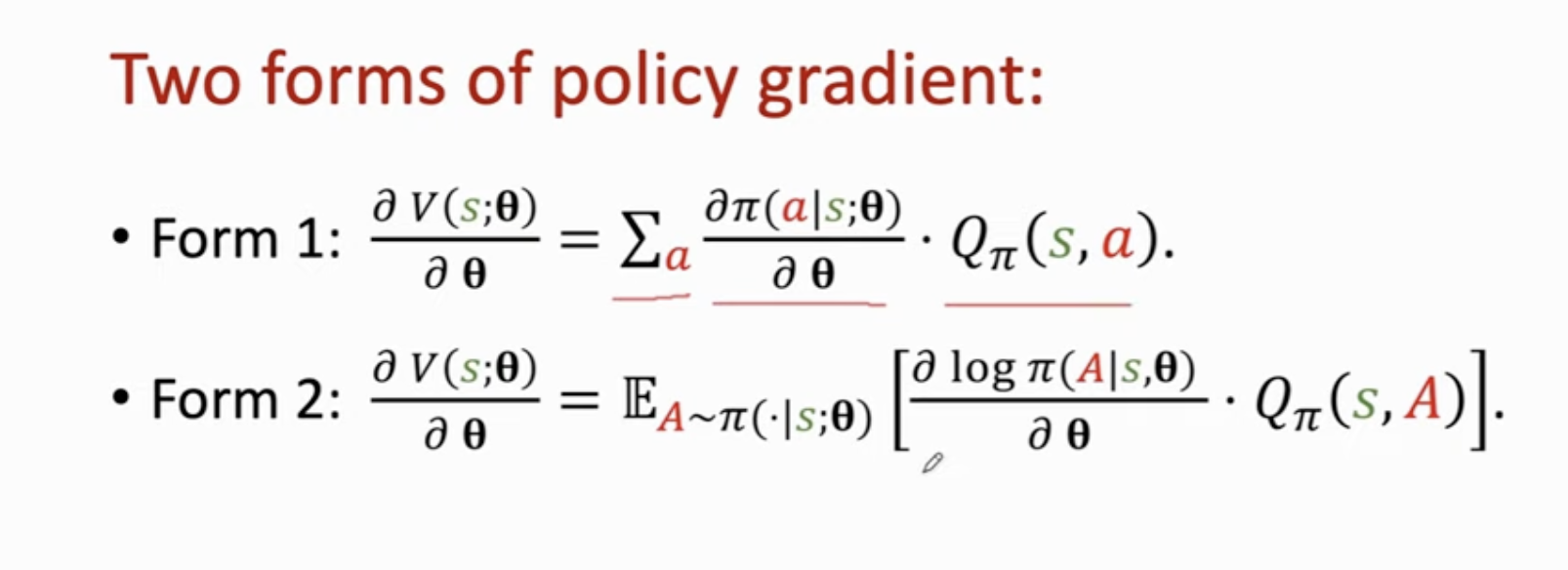
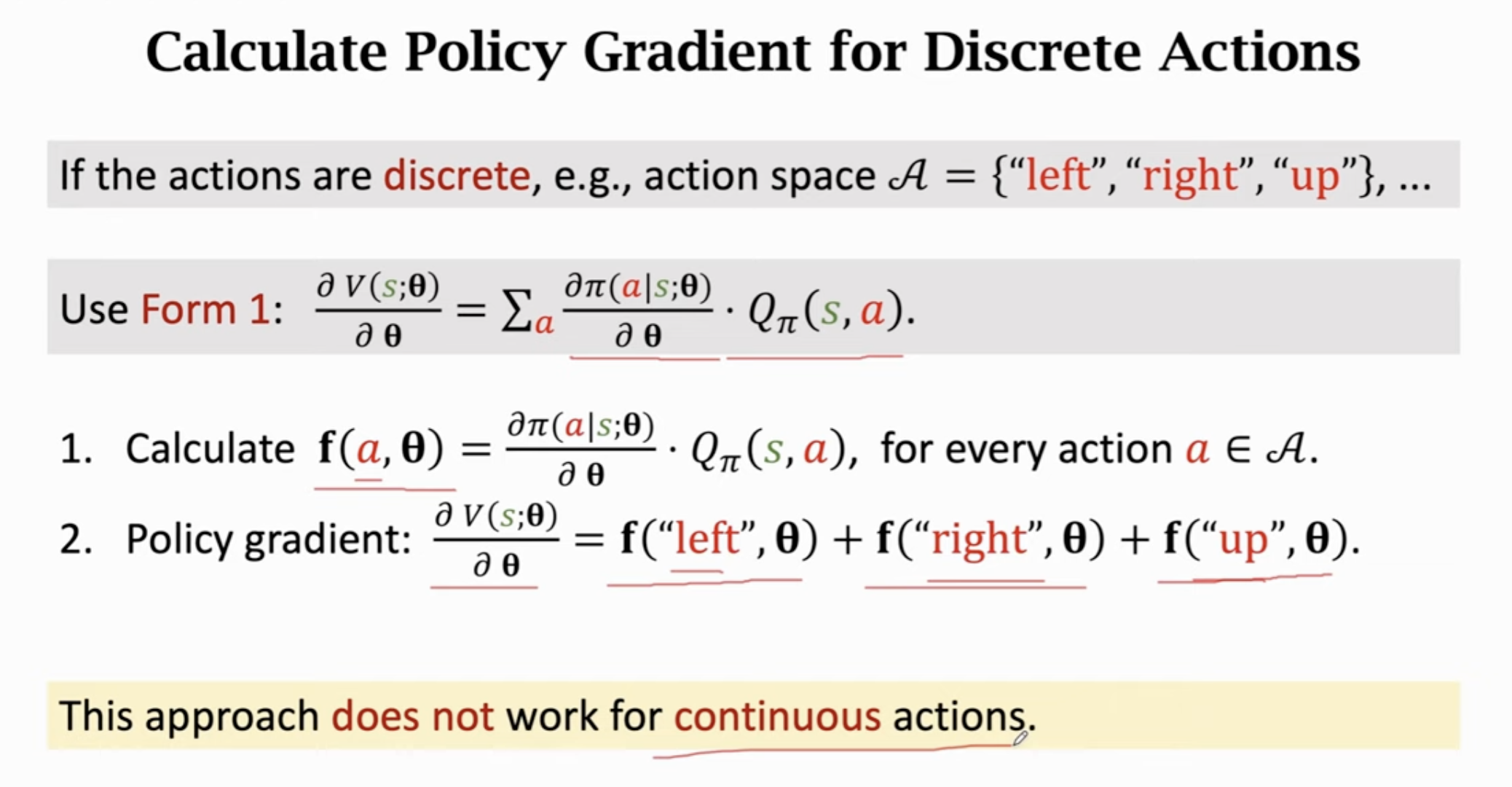
对于连续变量,用第二种形式,用蒙特卡洛近似:
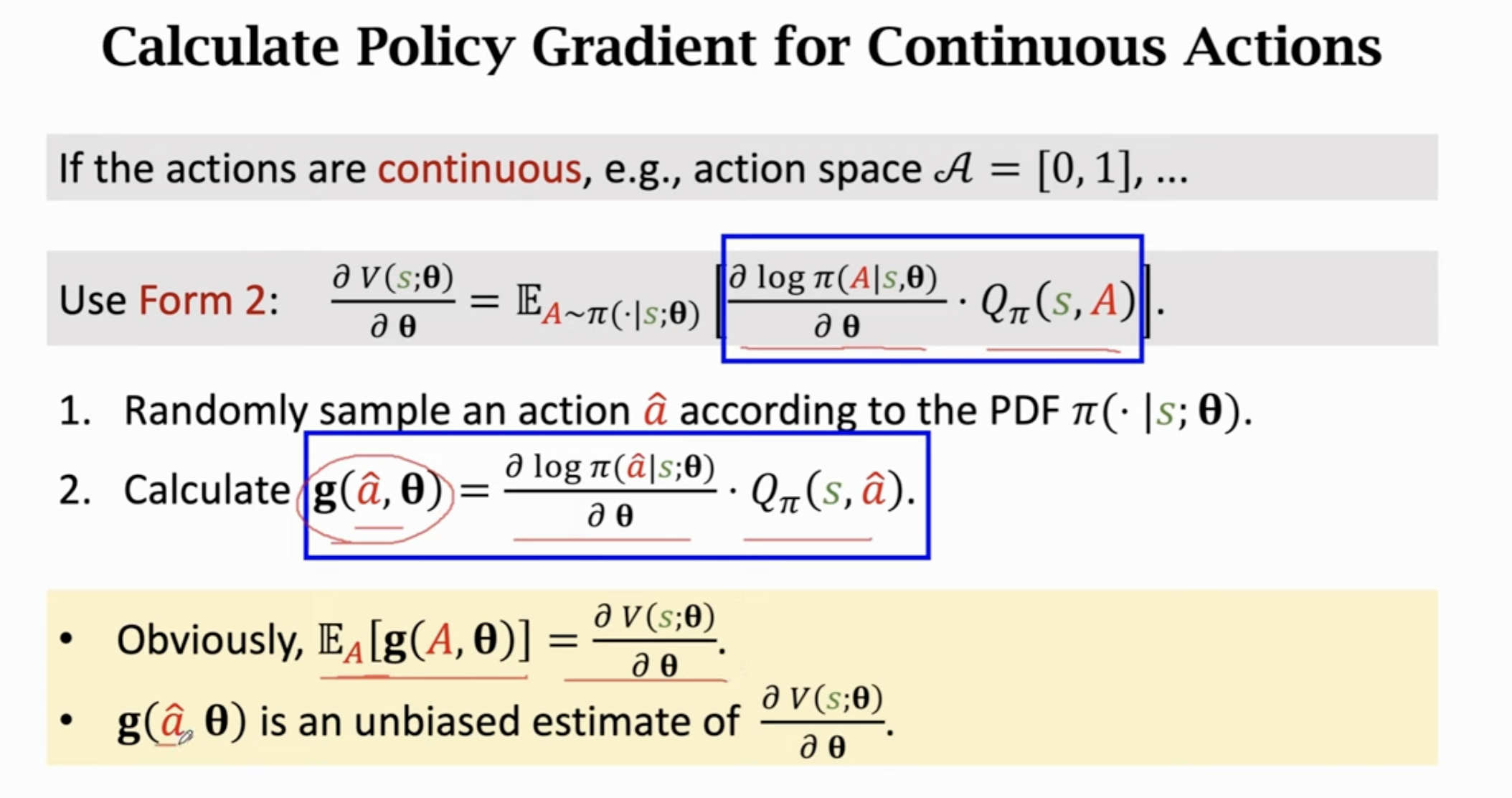
这里的是一个确定的动作。蒙特卡洛近似就是抽取一个或多个随机样本用于近似期望。这种方法对于离散动作也是适用的。
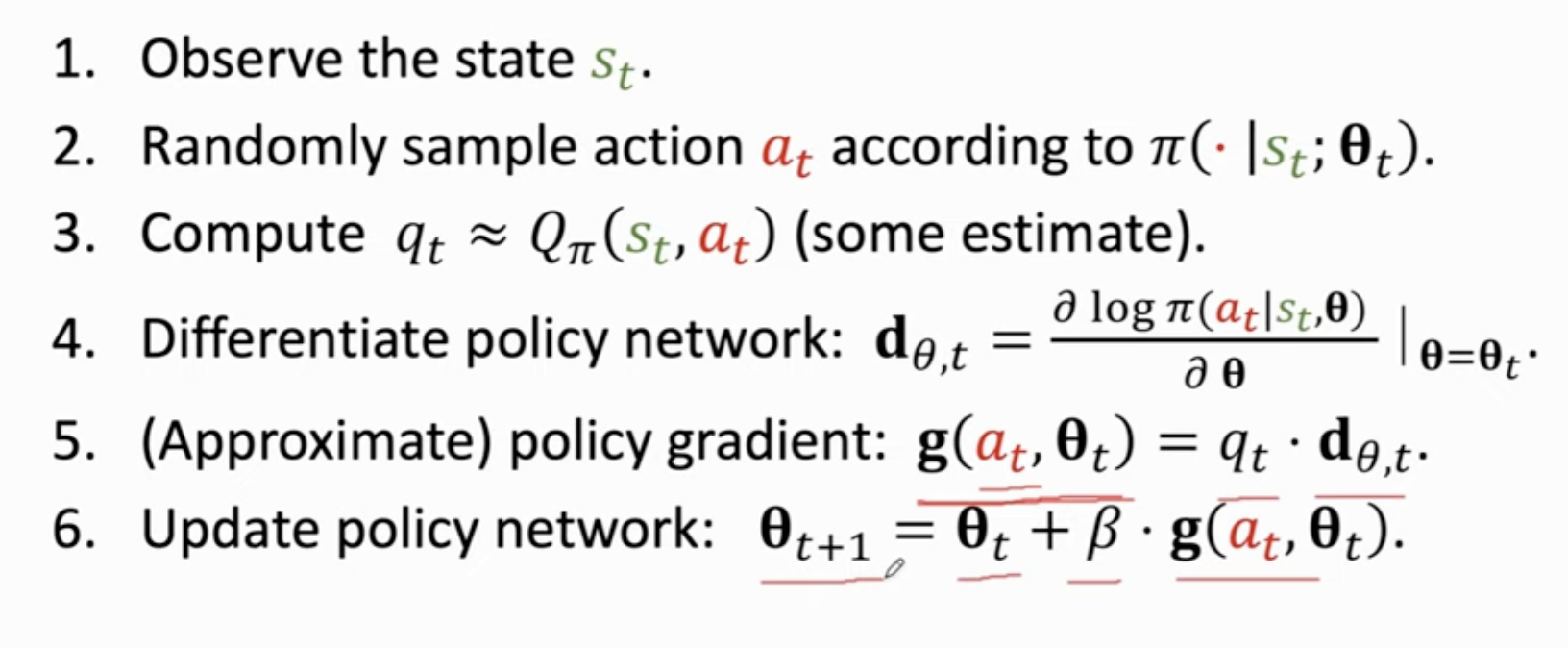

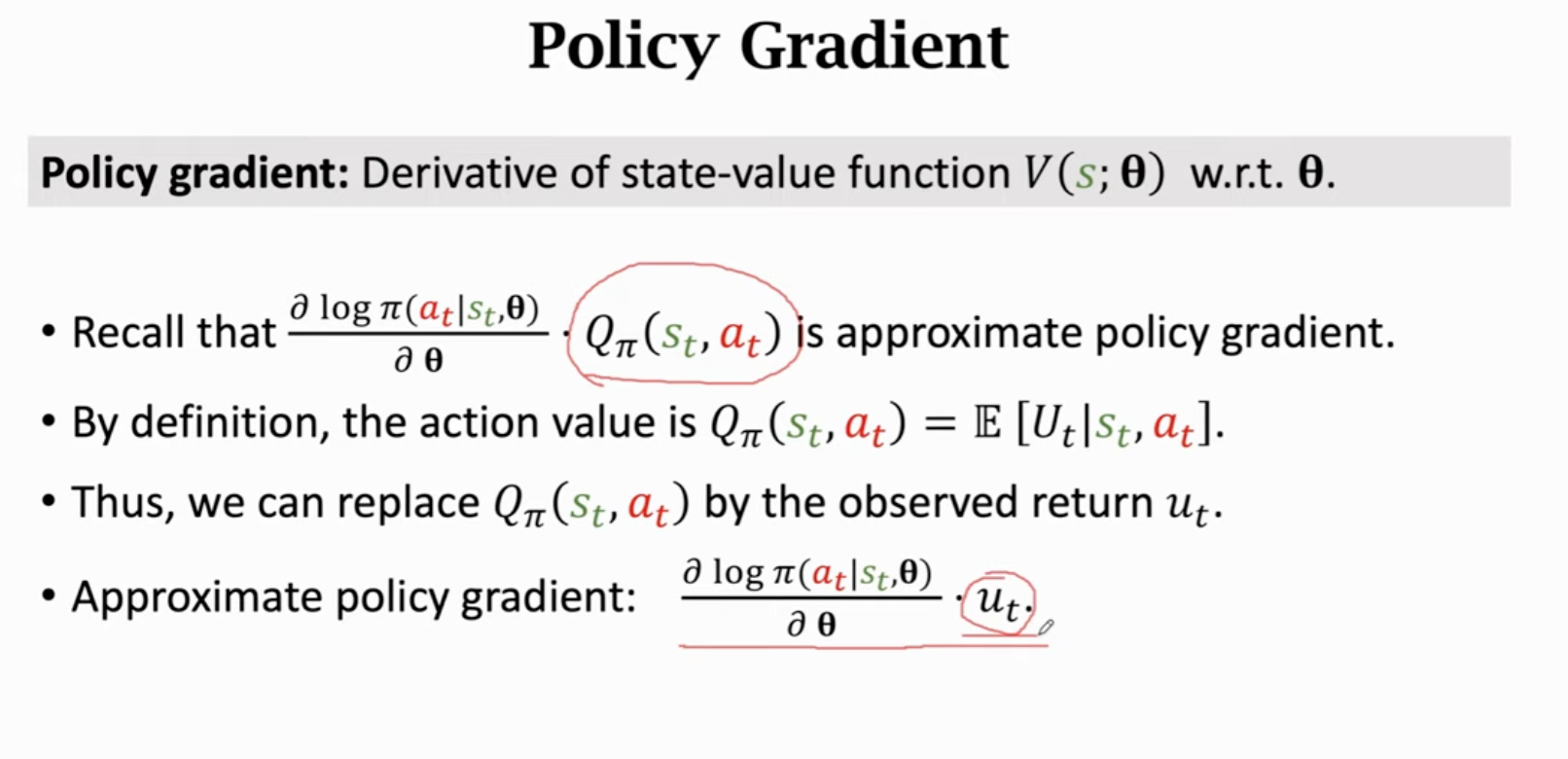
如何近似计算?
REINFORCE算法:
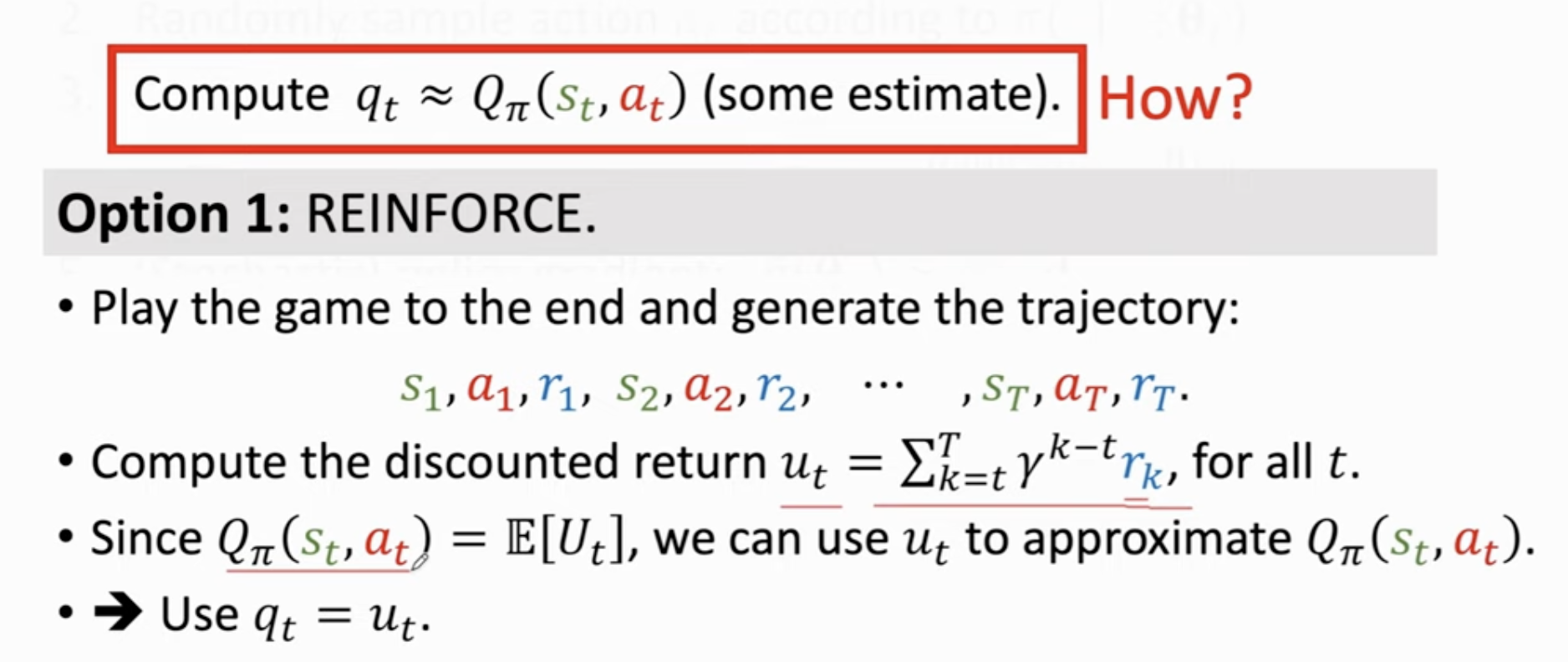
REINFORCE算法需要玩完一局游戏,观察到所有奖励才能更新策略网络。
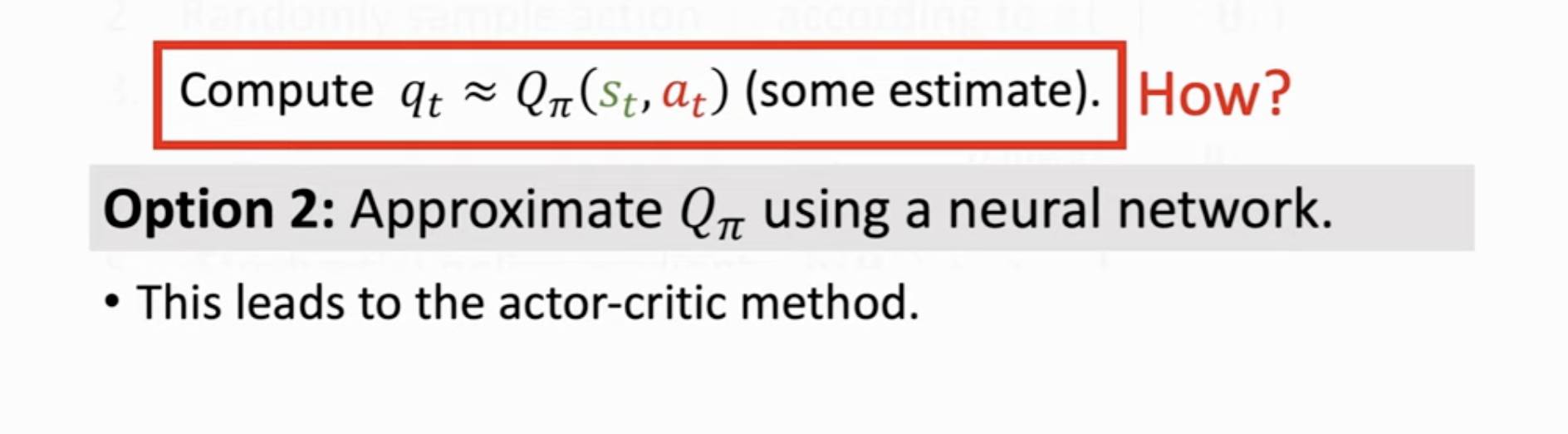
神经网络近似:actor-critic方法
4 基于价值的强化学习
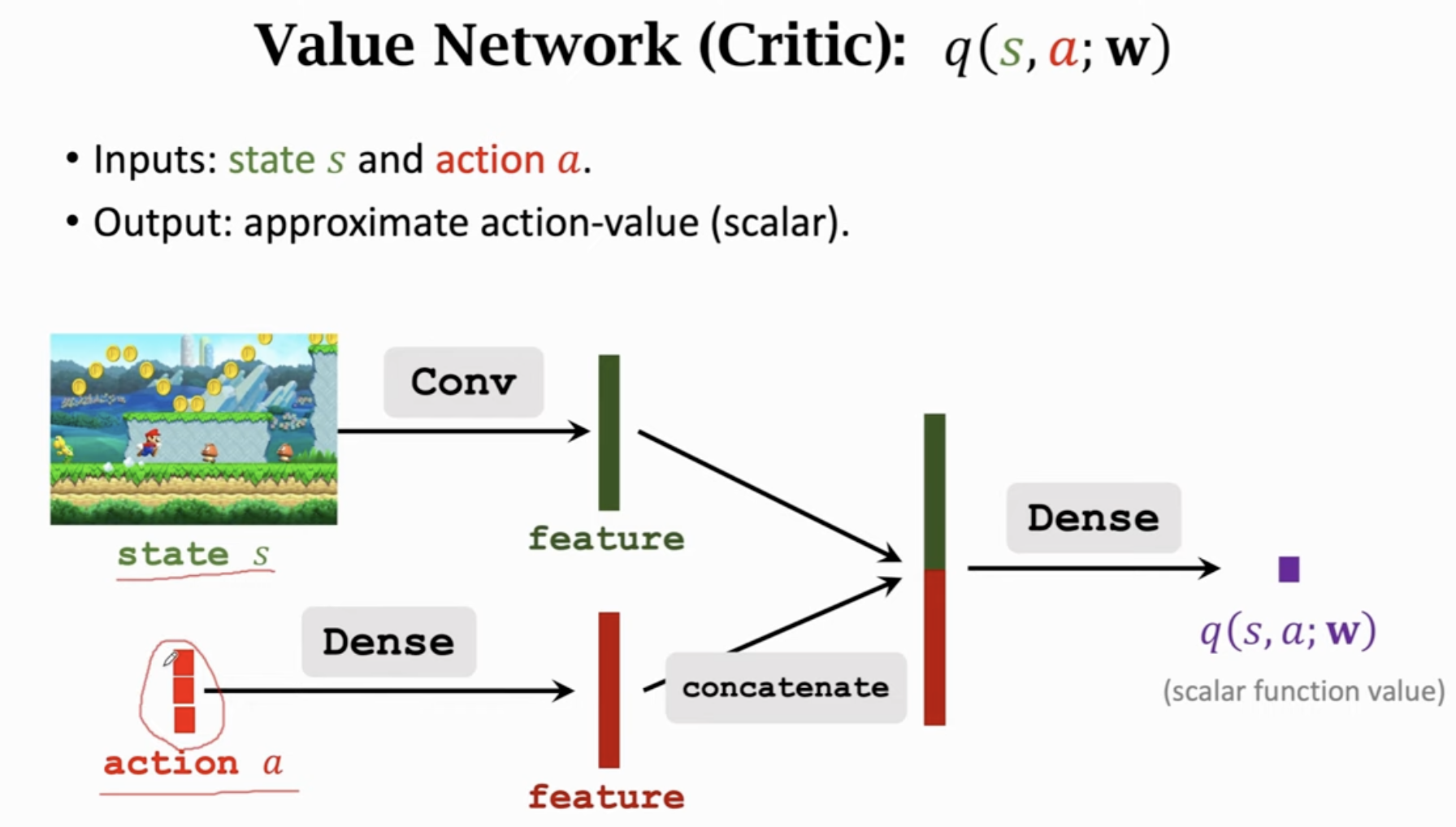
actor:策略网络,控制agent运动。critic:价值网络,用来给动作打分。构造两个网络,通过环境给的奖励去学习。
是的期望。和都不知道,可以通过两个神经网络同时学习这两个函数:
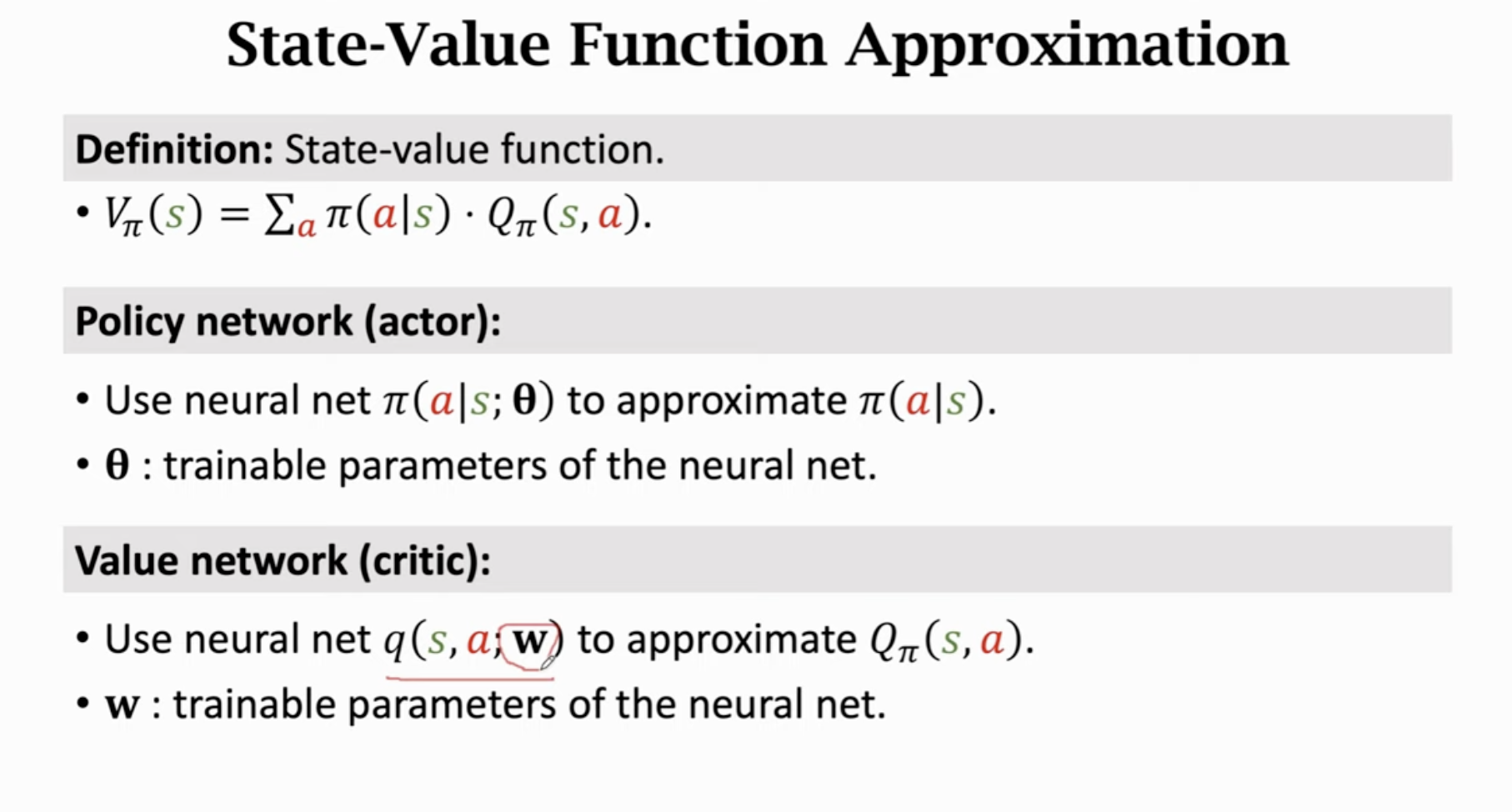
神经网络近似:
价值网络只是给动作打分,不控制agent的运动。
参数可以共享 or 独立。
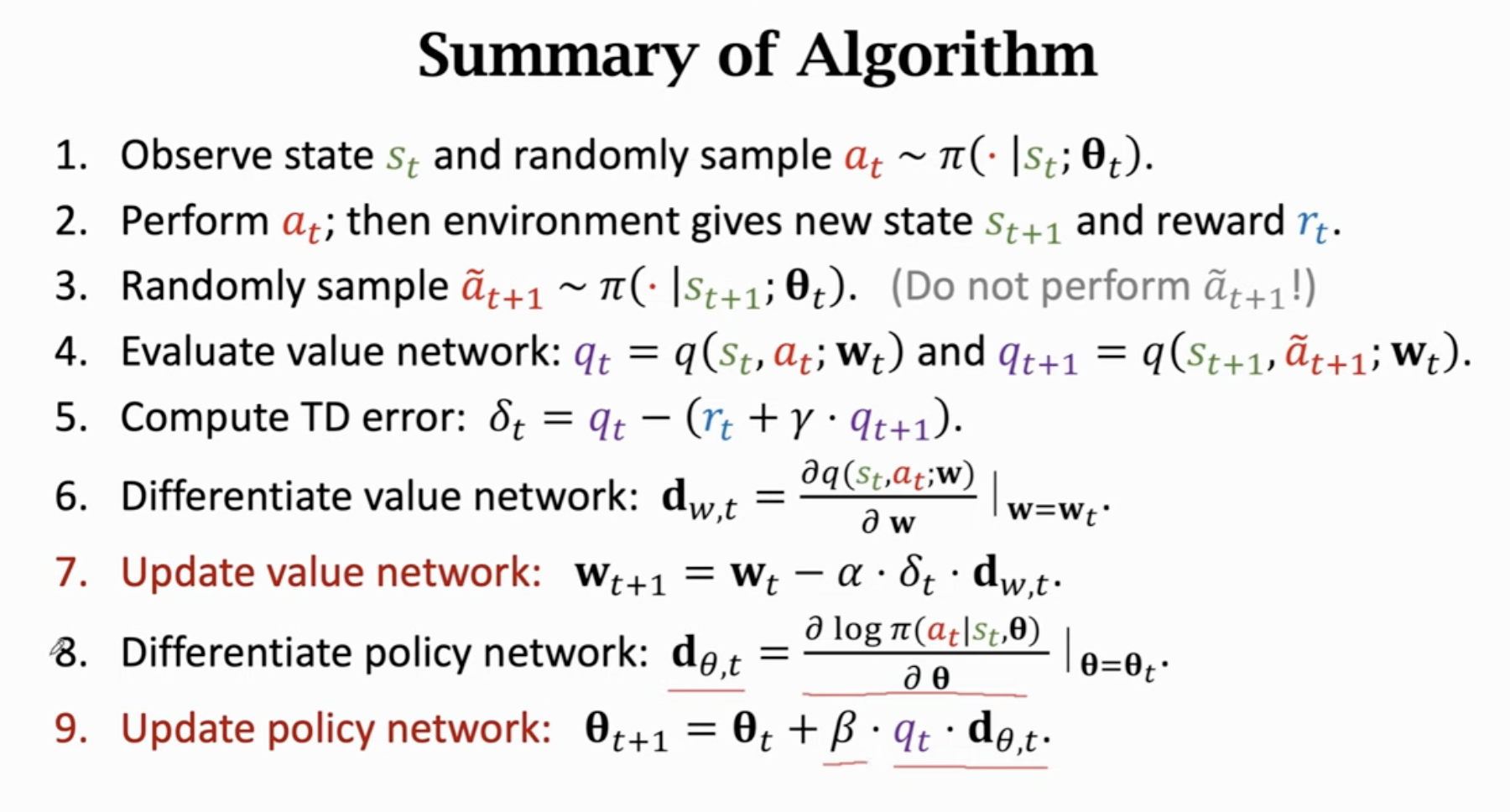
网络训练:
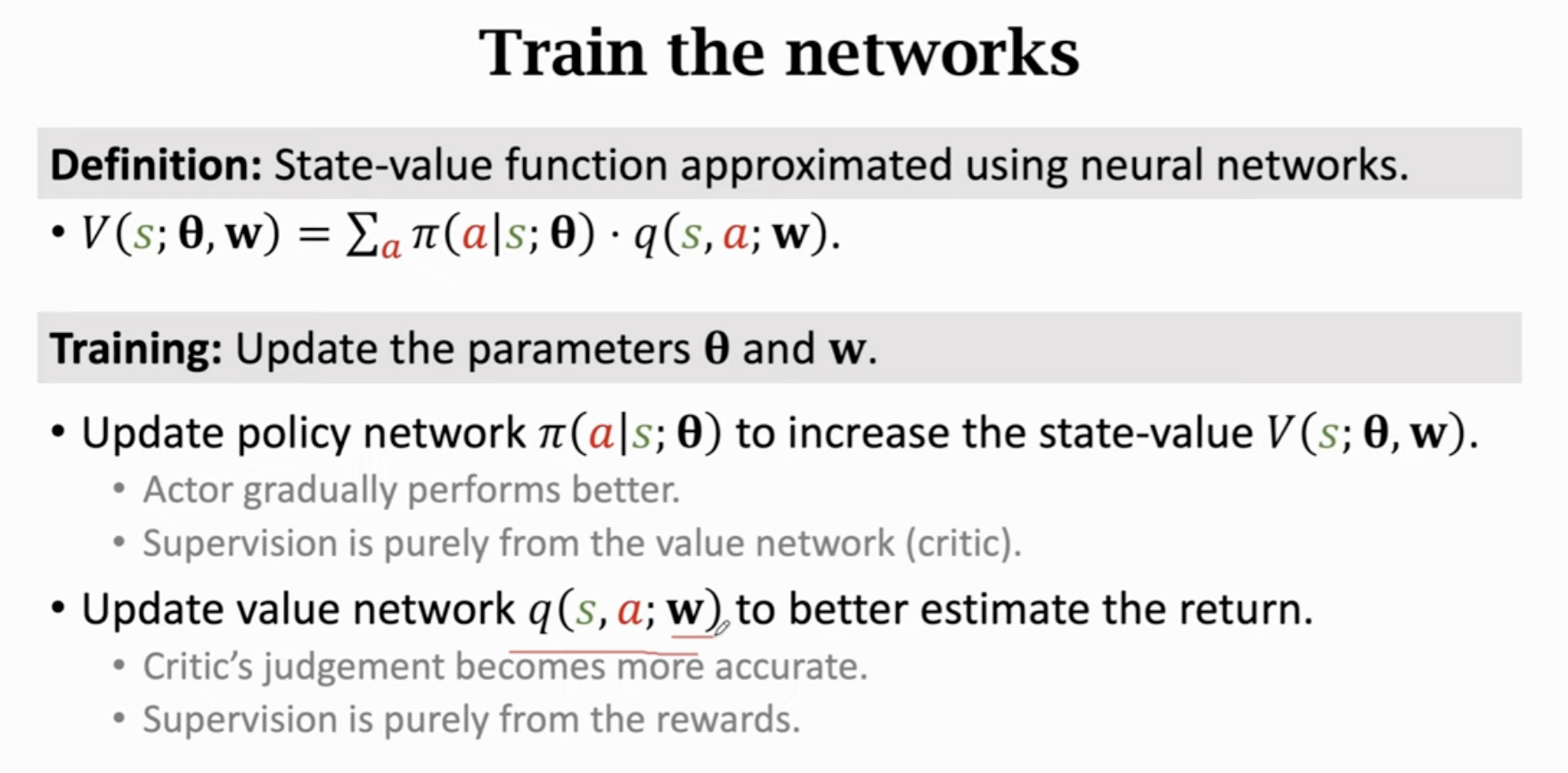
actor靠critic打分改进动作,critic通过环境的reward改进打分水平。
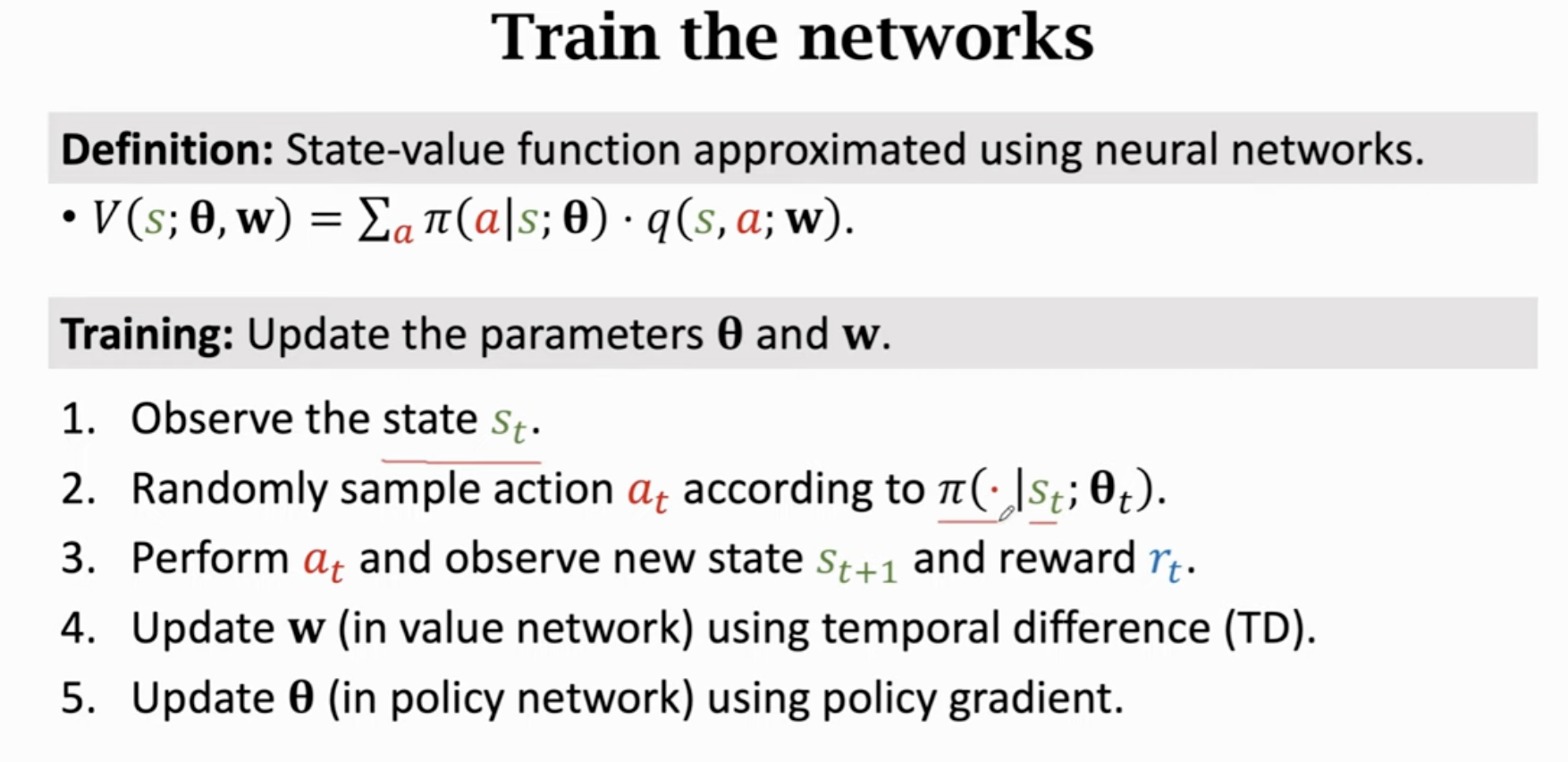
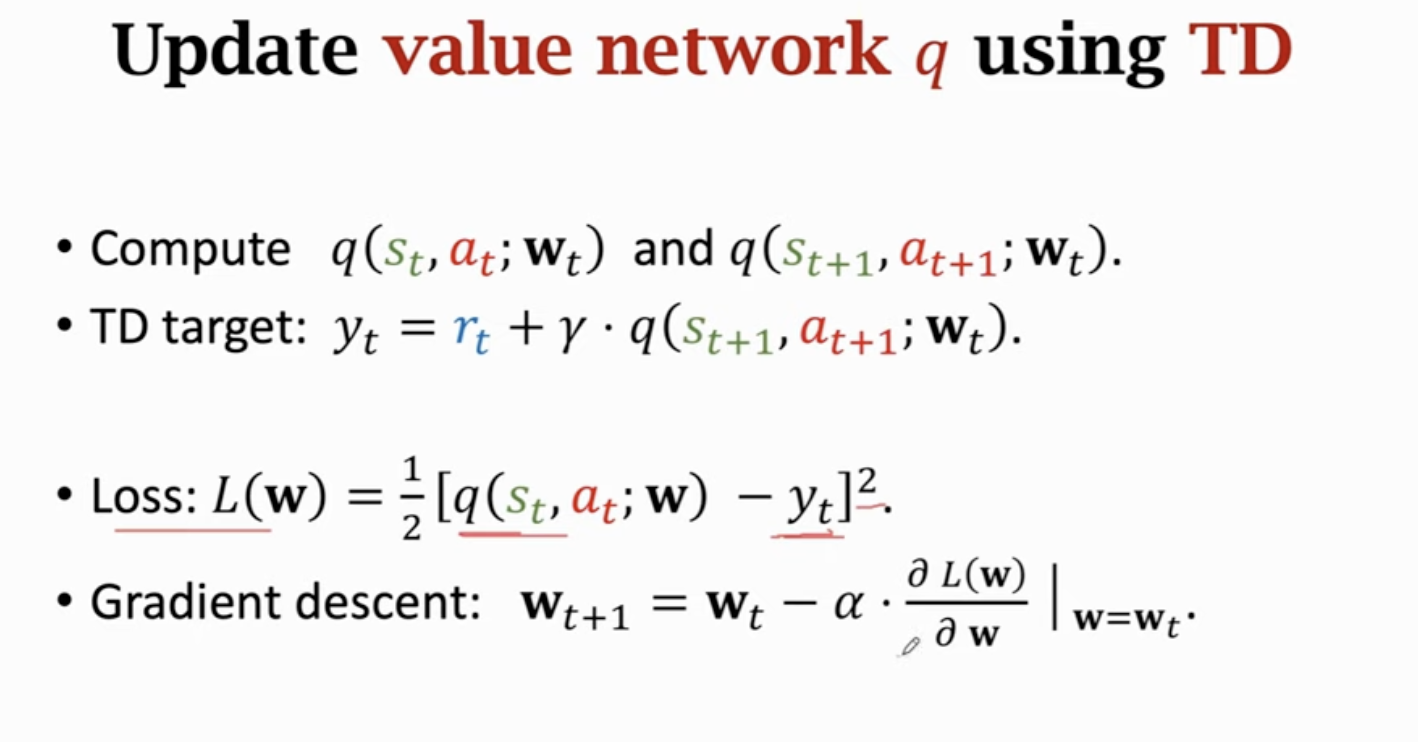
可以使用TD算法更新价值网络:
动作是根据策略网络随机抽样得到的。
更新策略网络:
必须根据进行随机抽样,否则保证不了无偏性。
每一次迭代执行如下9个步骤,只做一次动作,获得一次奖励,更新一次网络:
部分书和论文用代替(with baseline):
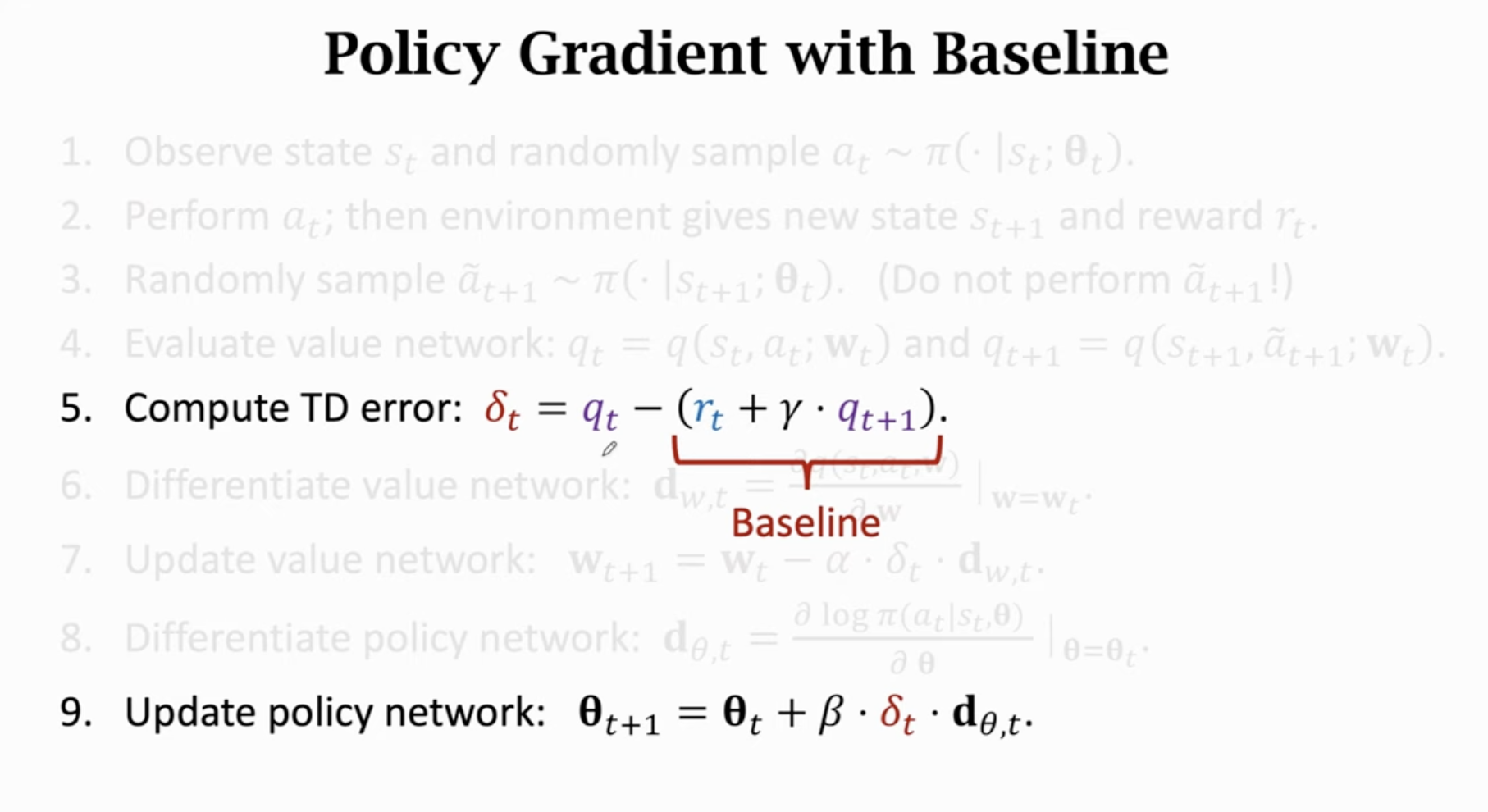
期望完全相等,效果更好,用好的baseline可以降低方差,收敛更快。任何接近的数都可以是baseline,但这不能是动作的函数。上面这种方式的baseline是。
最终目标:学习策略网络。价值网络只是起到辅助作用。
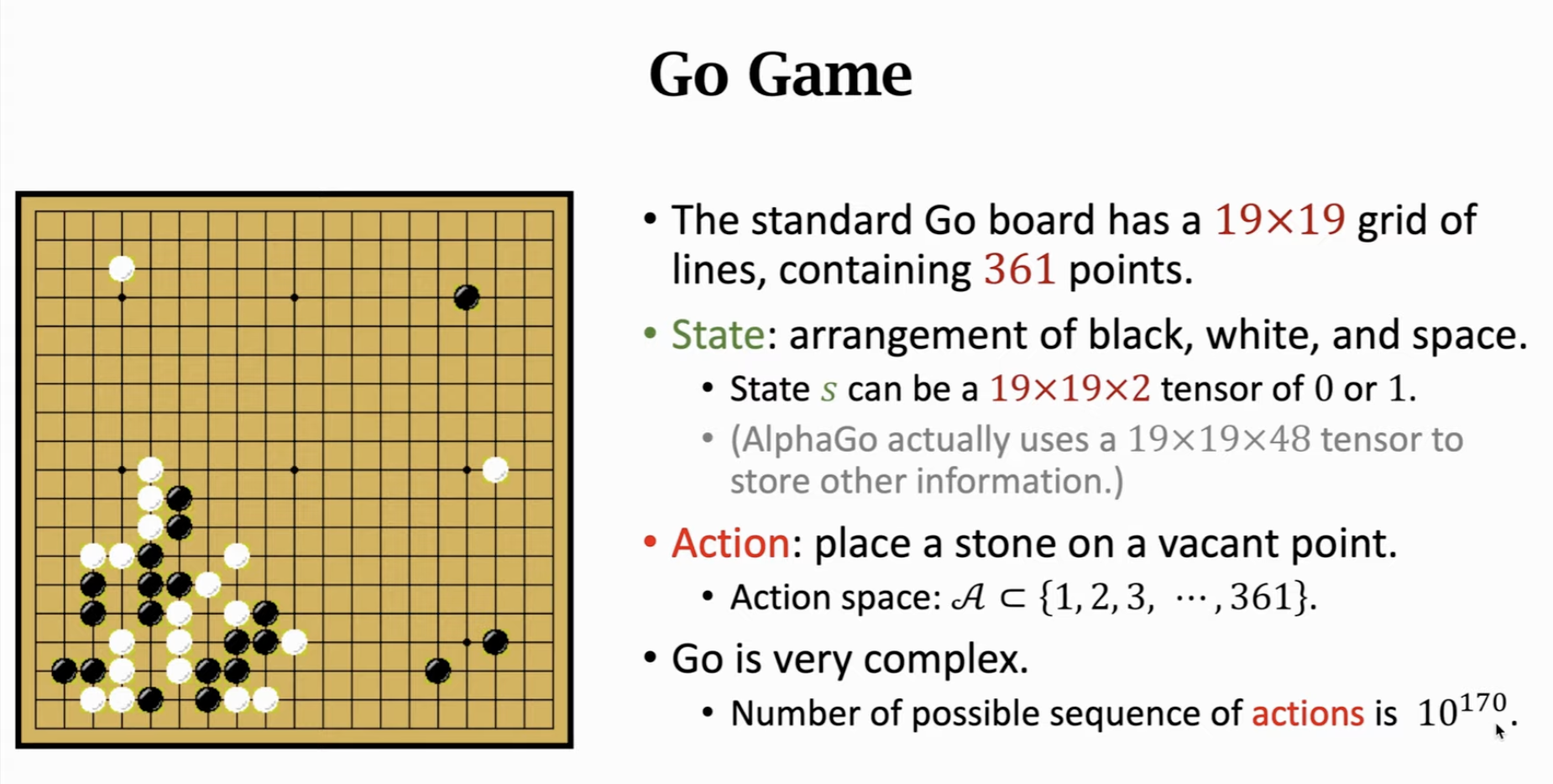
5 AlphaGo & Model-Based RL
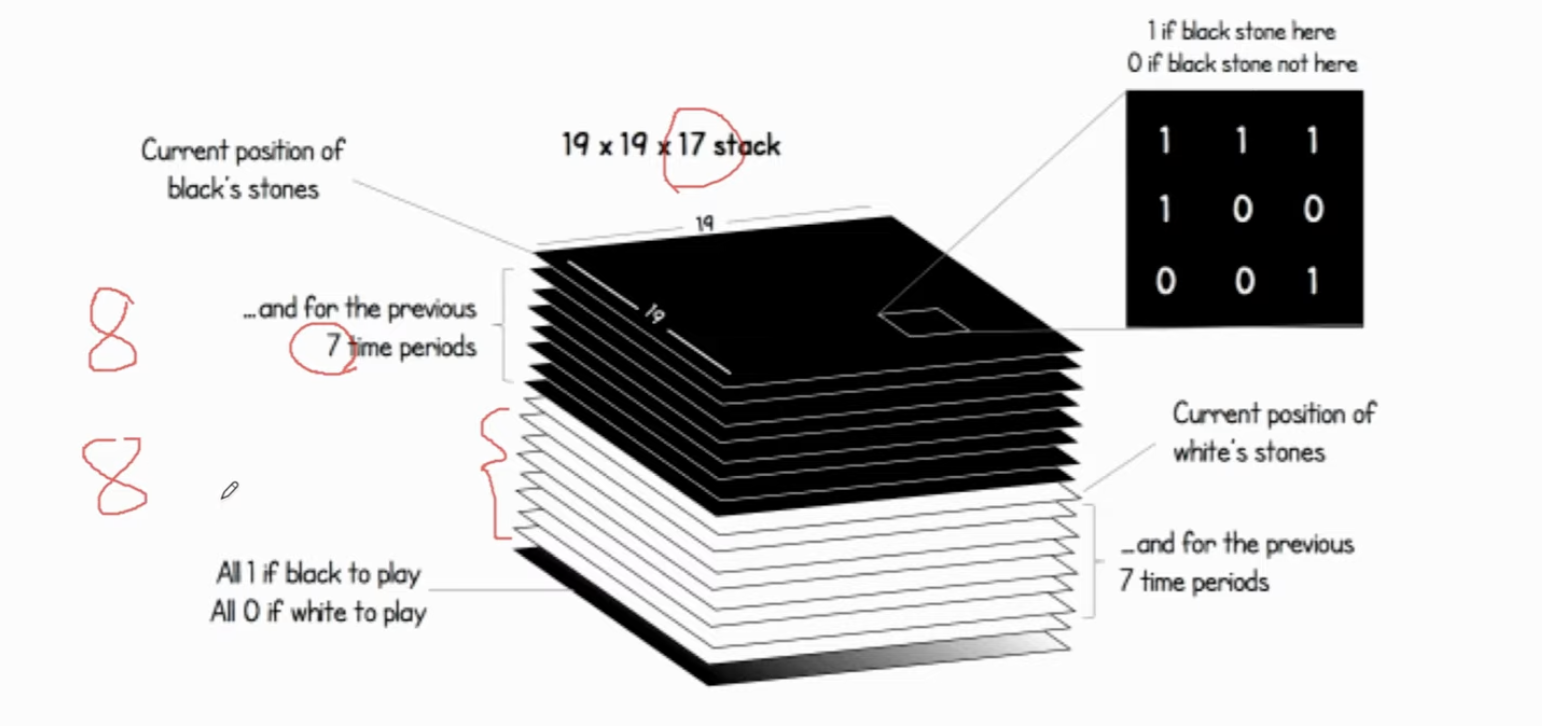
8+8+1=17
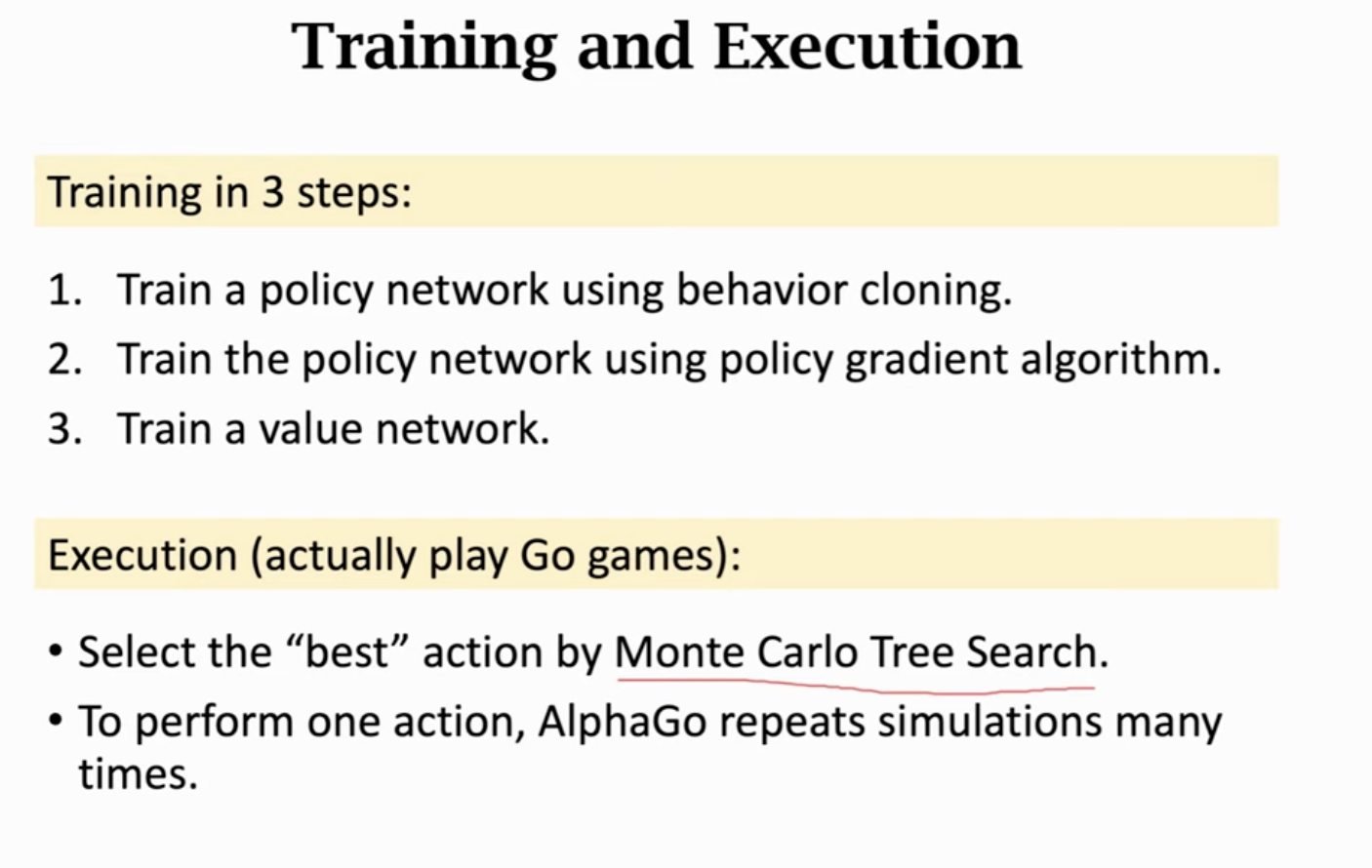
通过Behavior Cloning初始化Policy Network
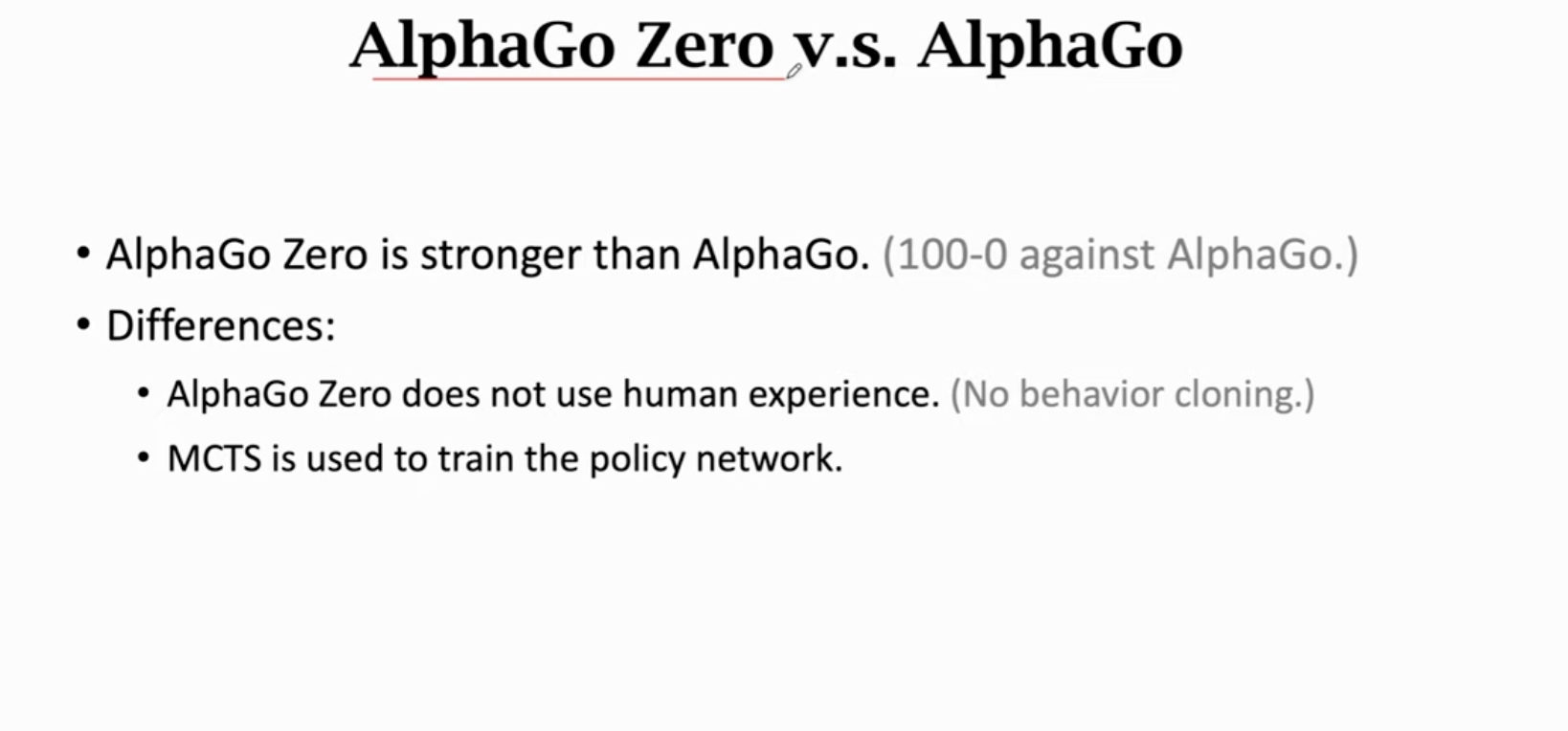
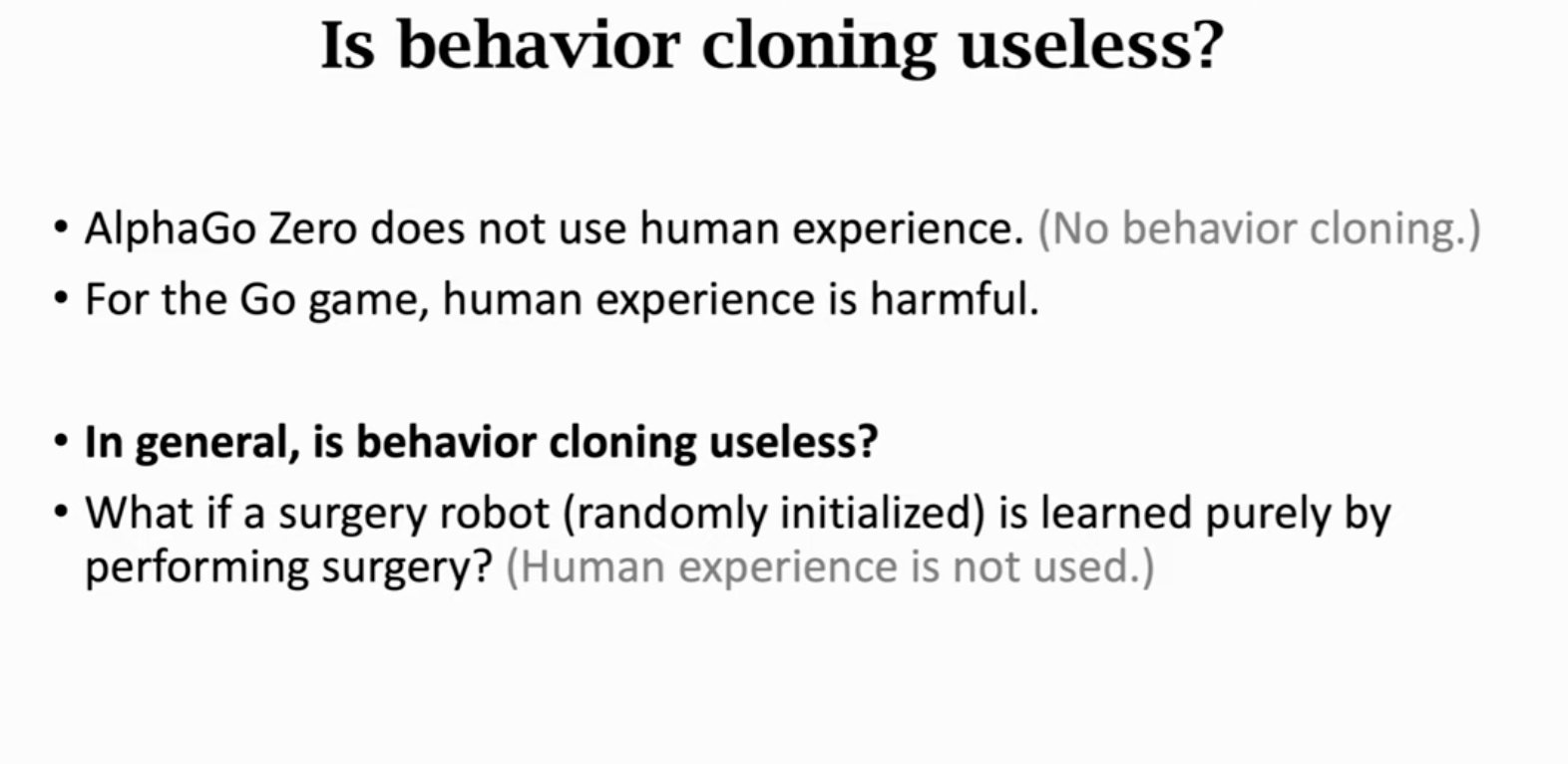
最新的alpha-go zero没有用behavior cloning。
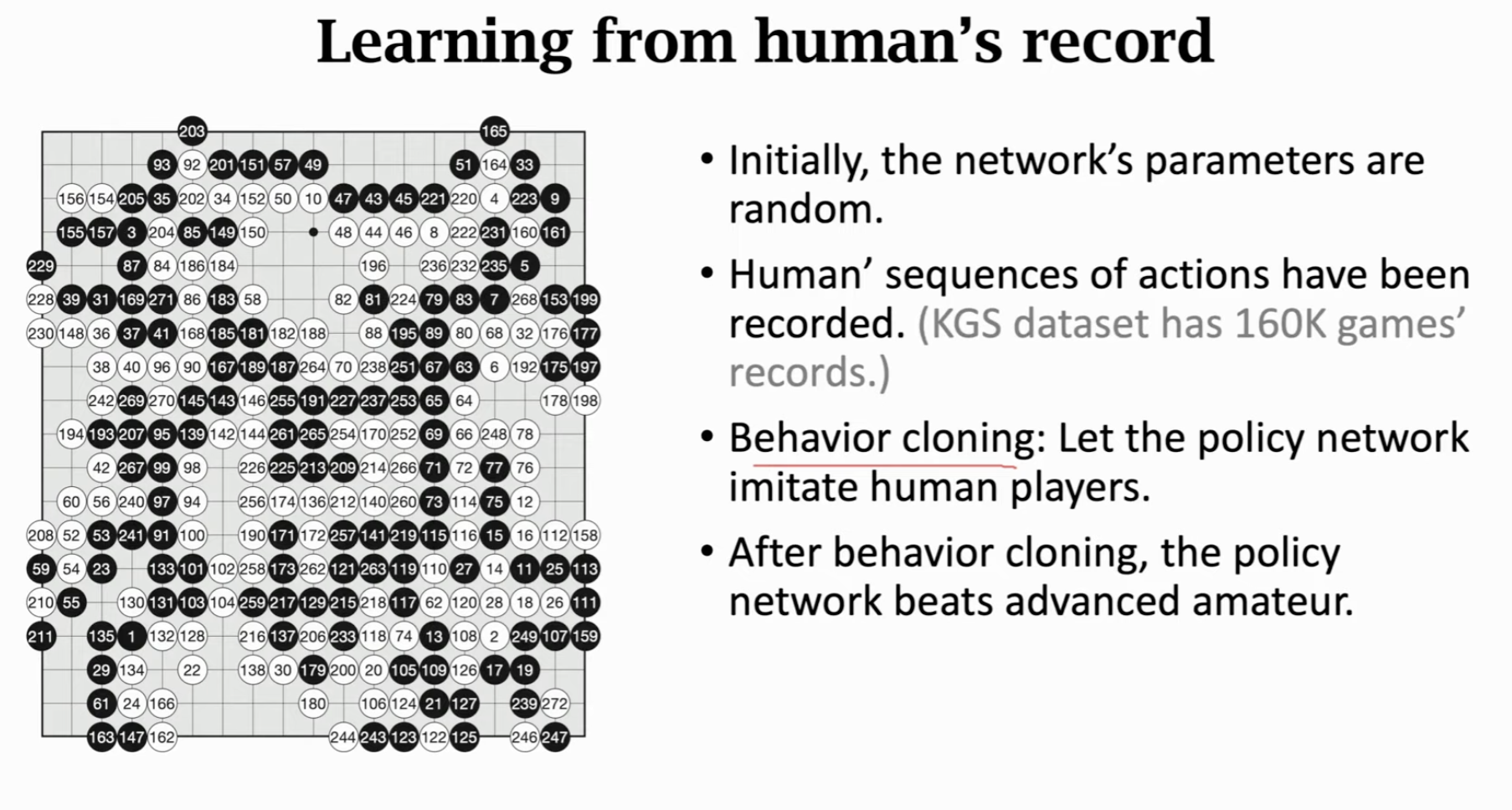
强化学习和模仿学习的本质区别在于有没有奖励。
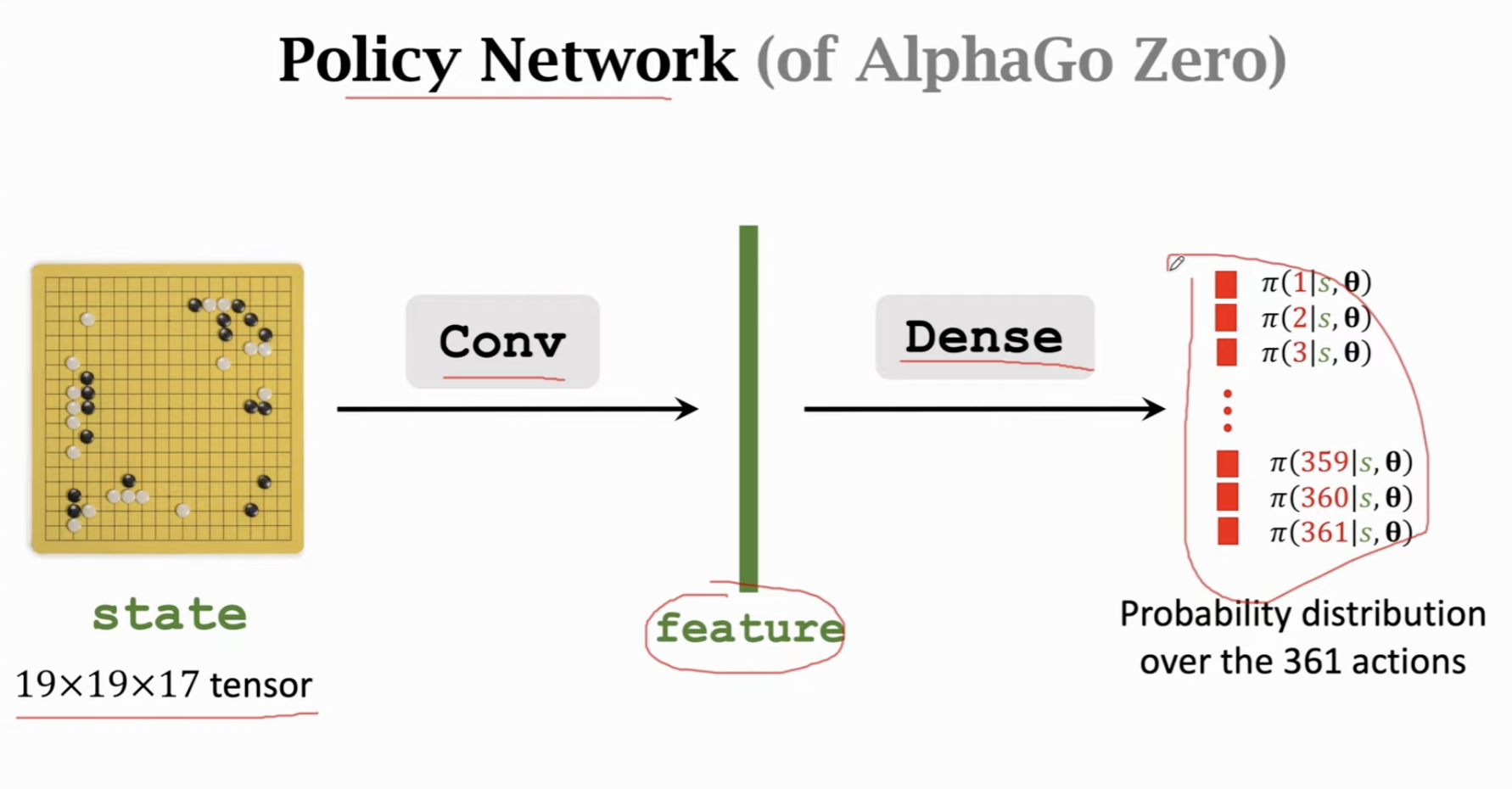
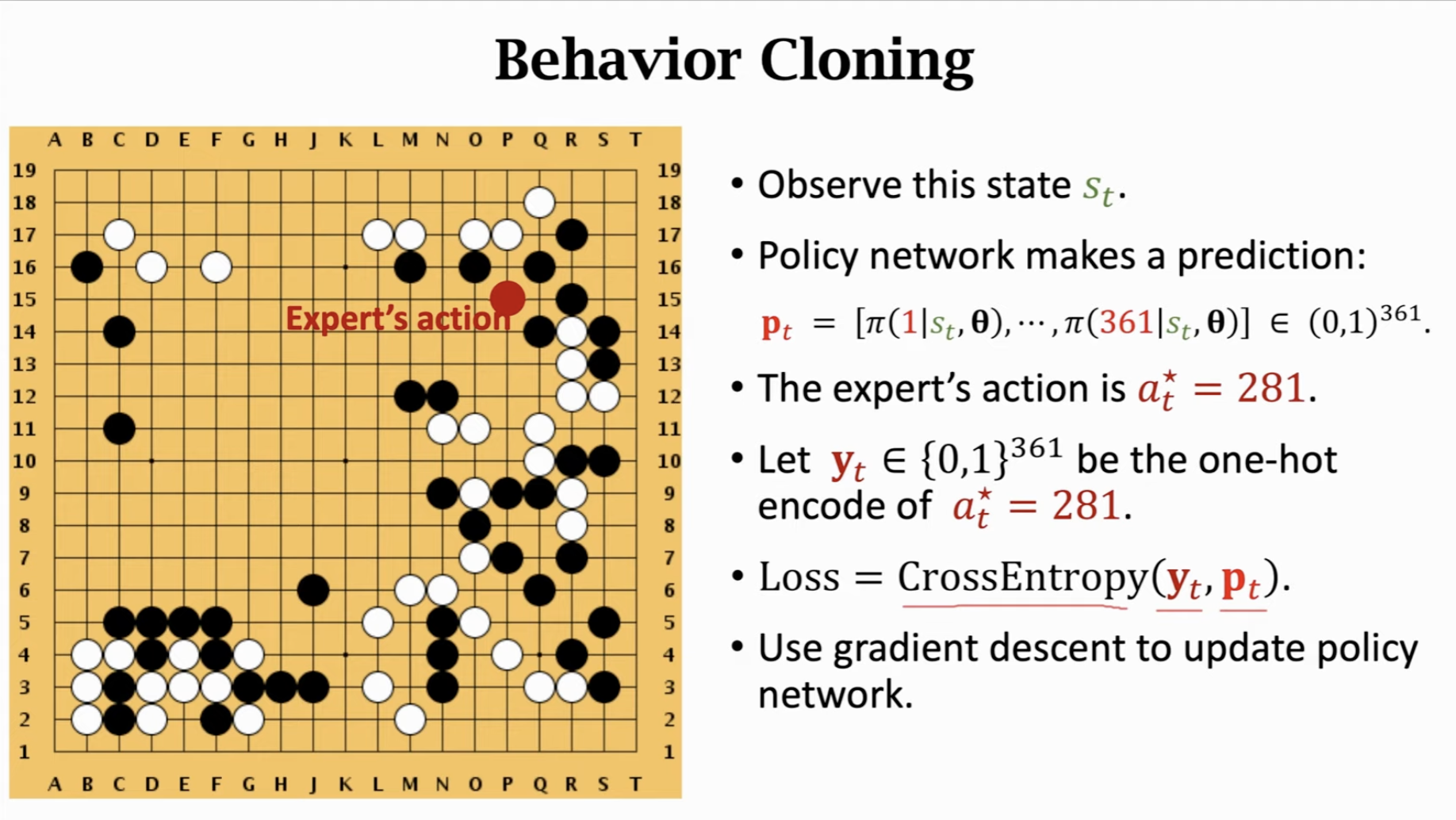
实际上就是多分类任务:
可能存在错误累加的问题;围棋状态太多,很有可能遇到棋谱没有的动作;打败behavior cloning训练的ai,可以使用一些不同寻常的动作,使状态很特殊,不同于已有的棋谱。
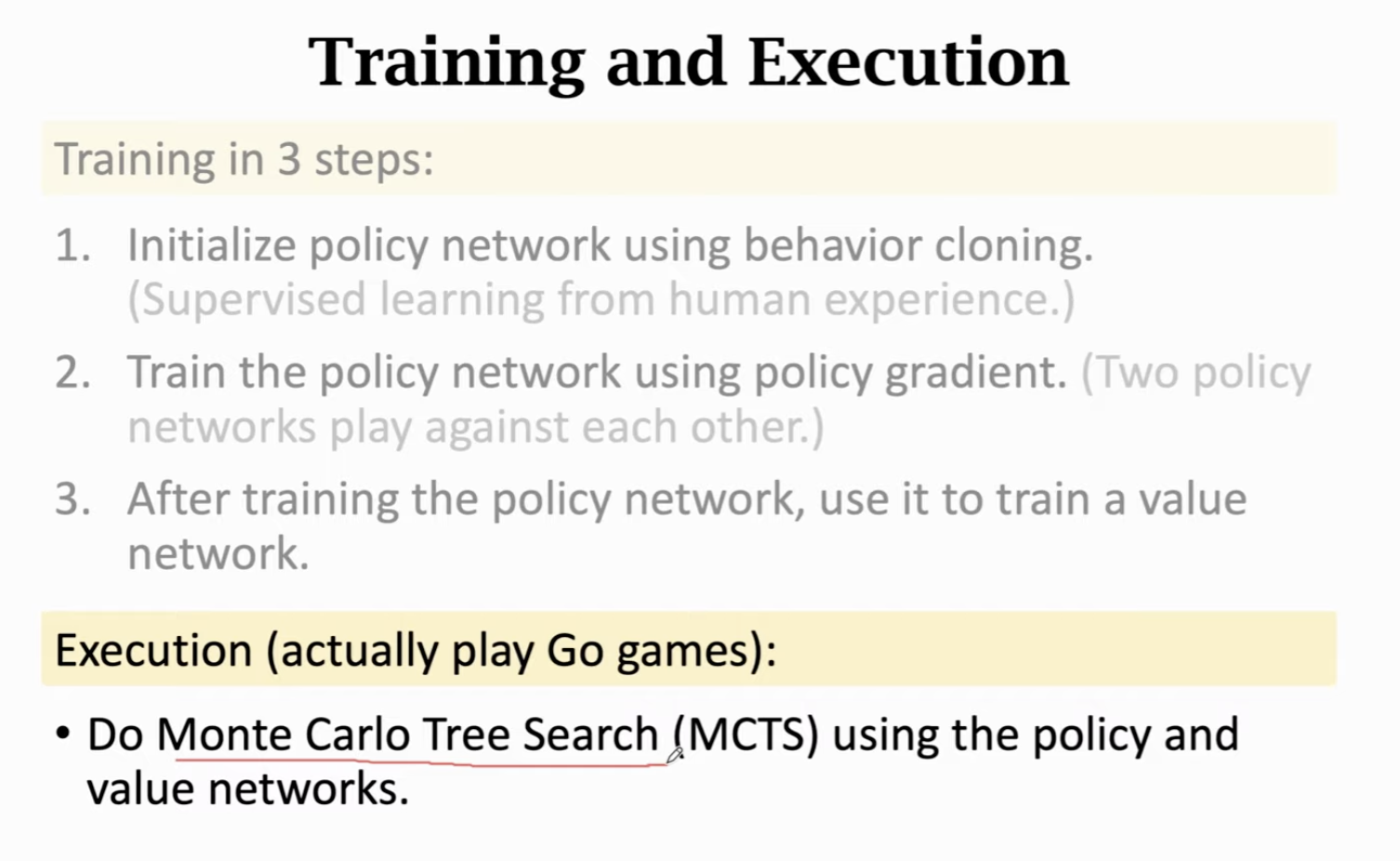
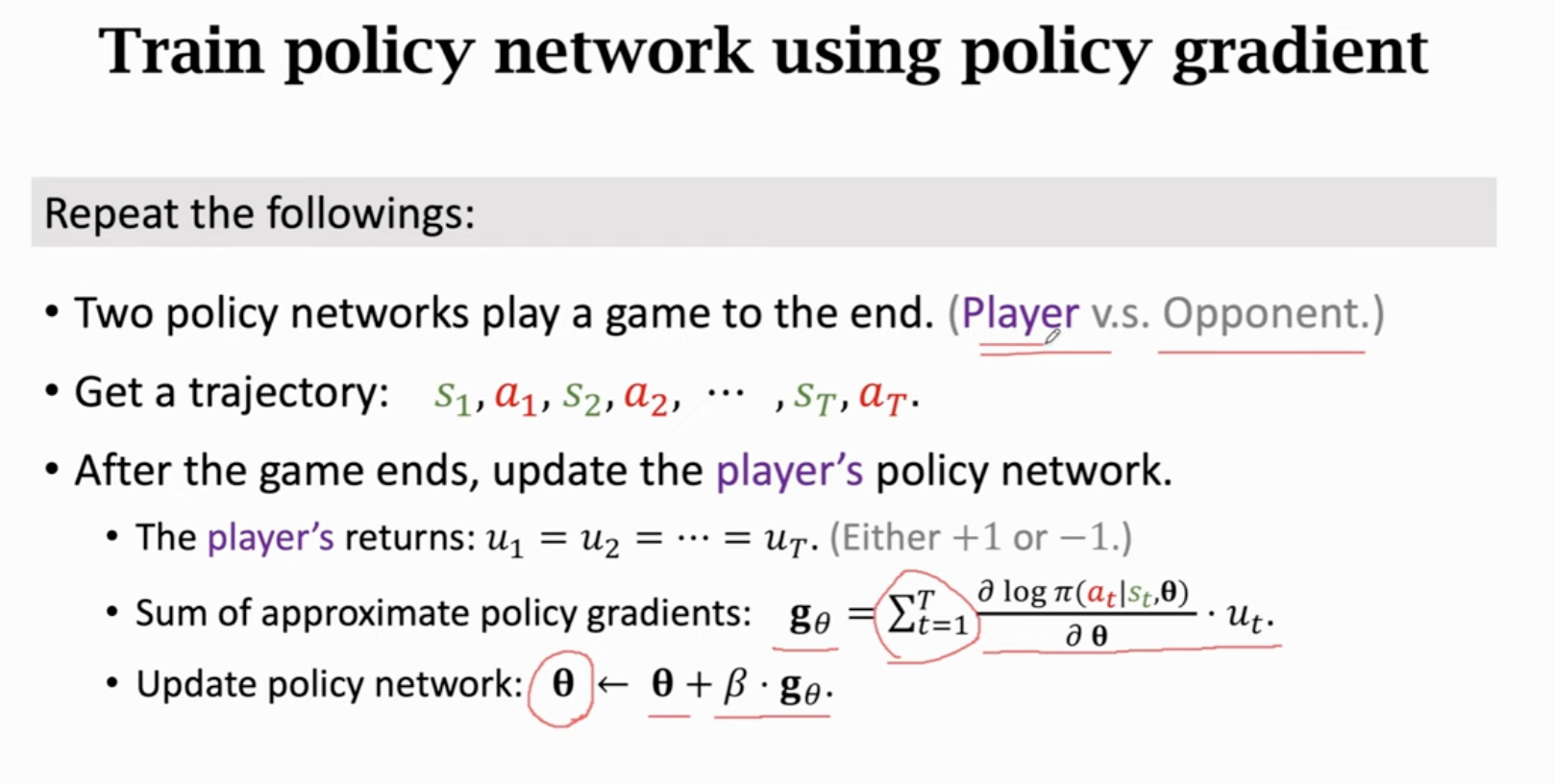
Train Policy Network Using Policy Gradient
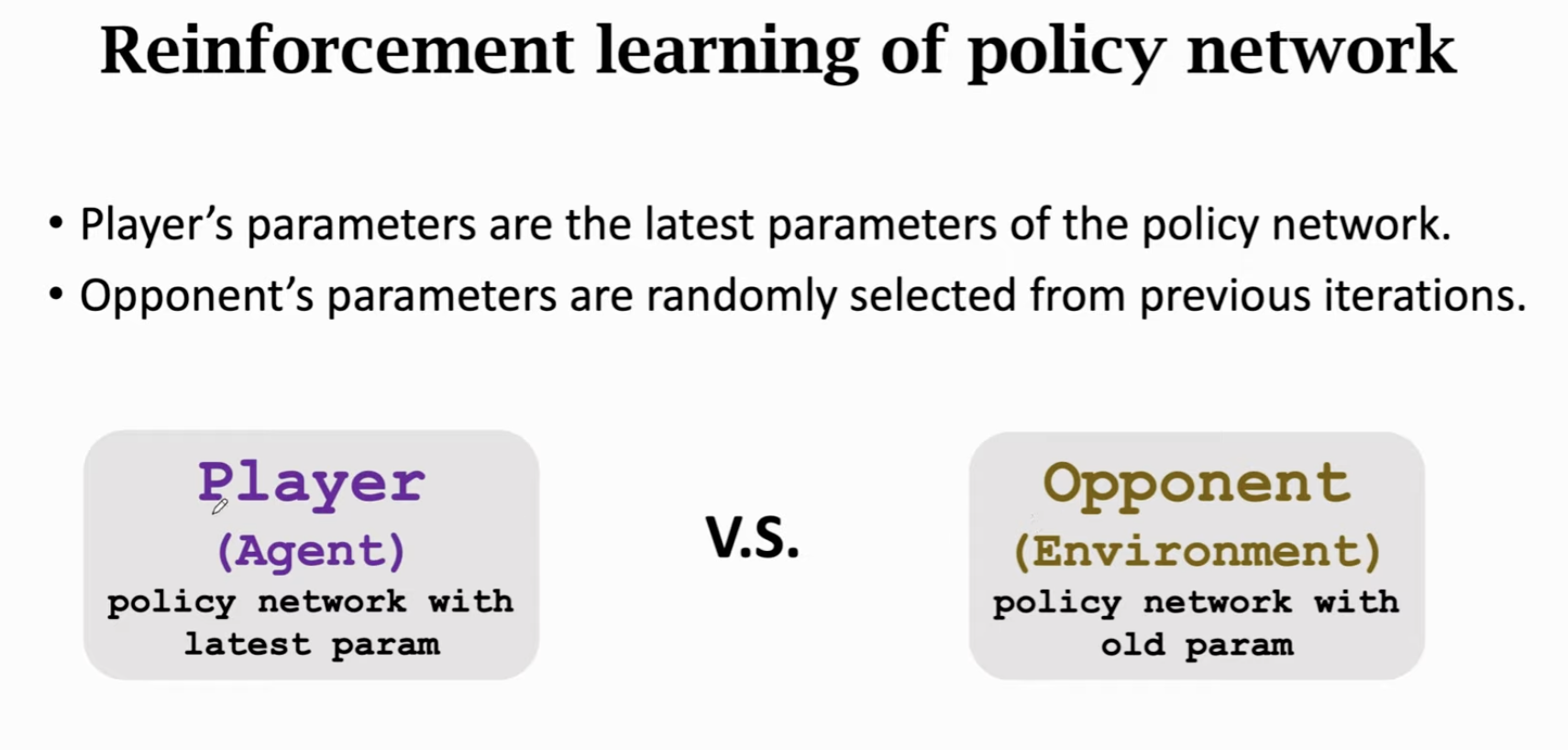
每下完一局,把胜负作为奖励,靠奖励更新player的参数。Opponent相当于环境,参数不用学习。
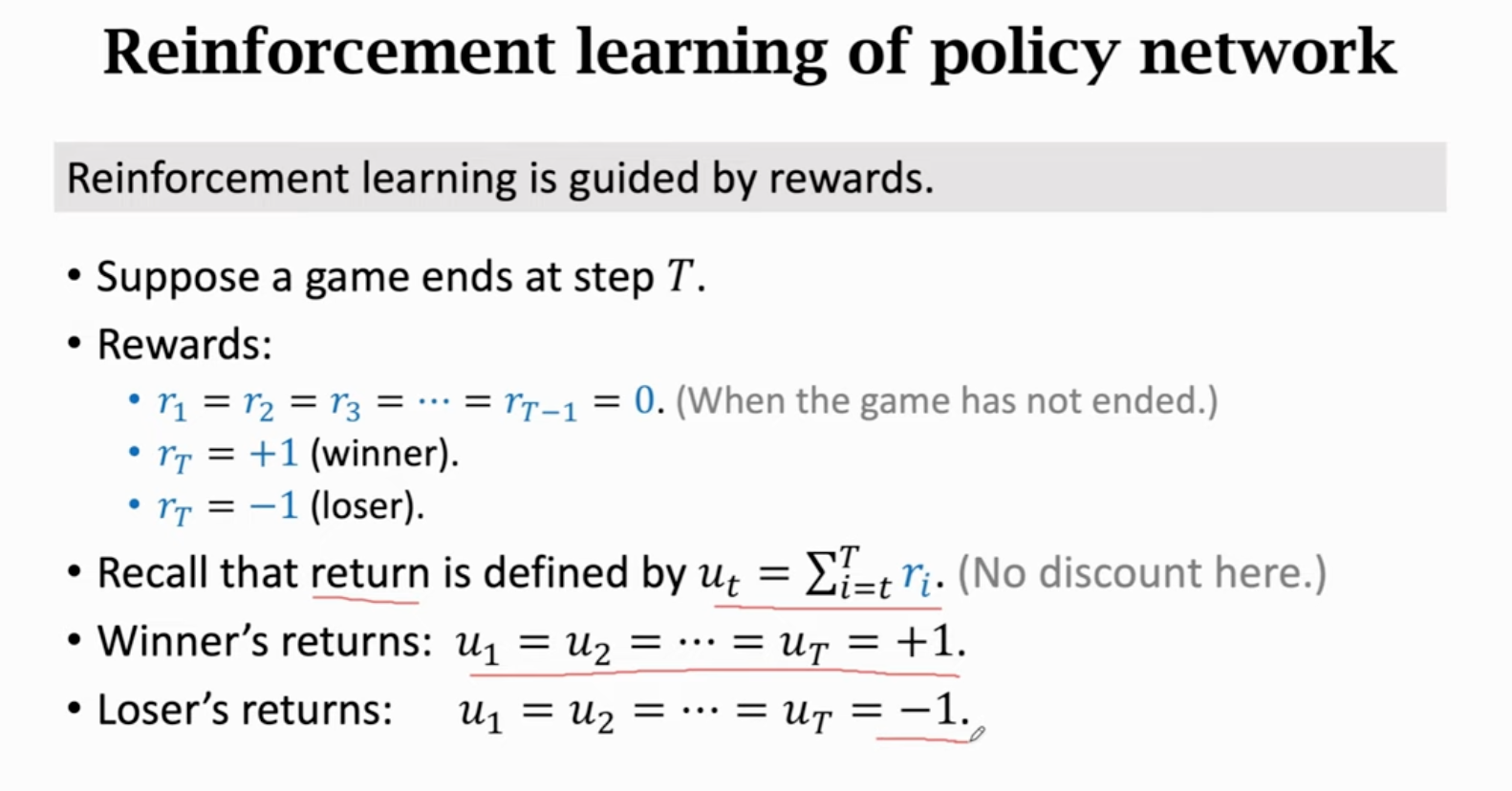
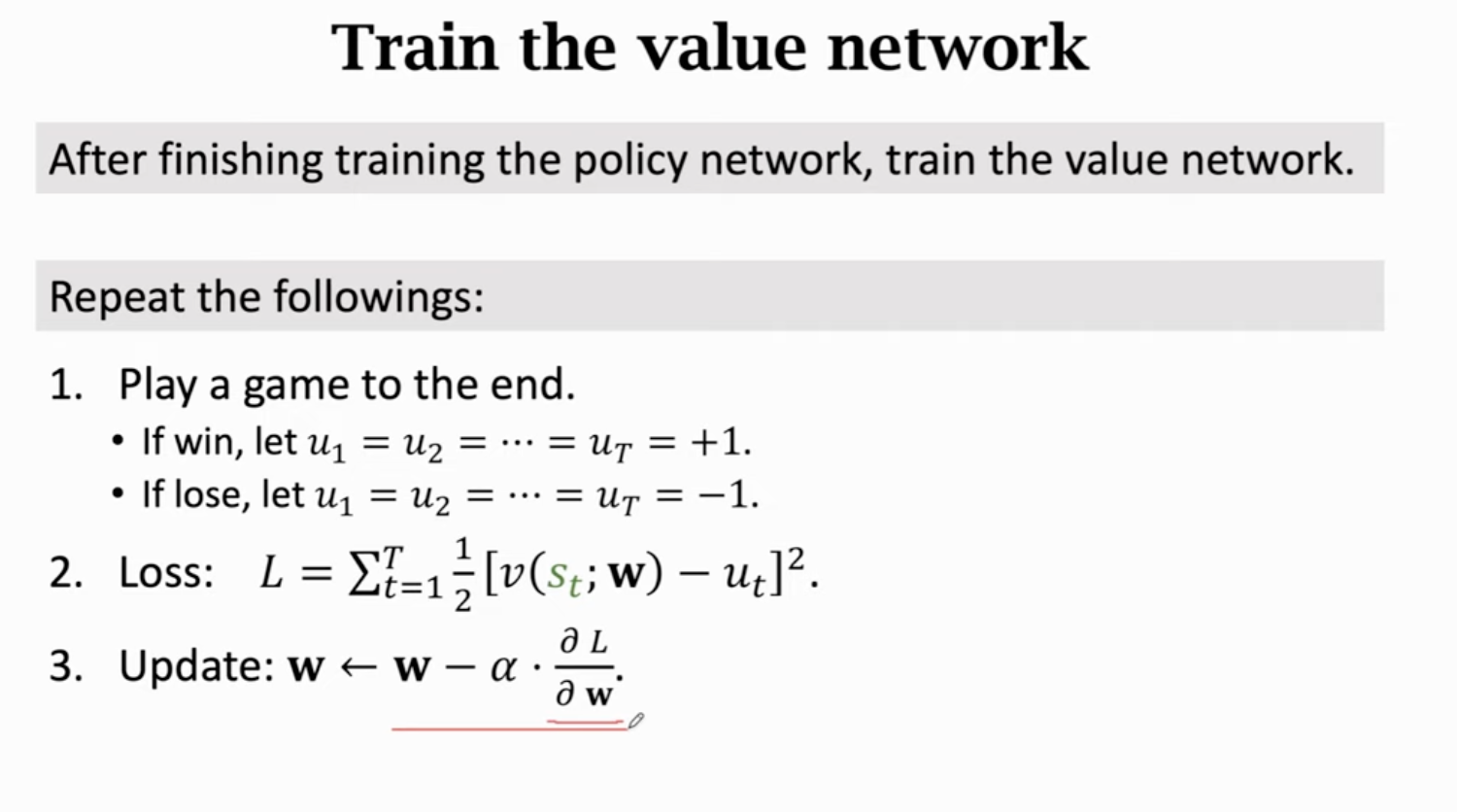
没有办法区分游戏里哪一部分是好棋,因此不作折扣。
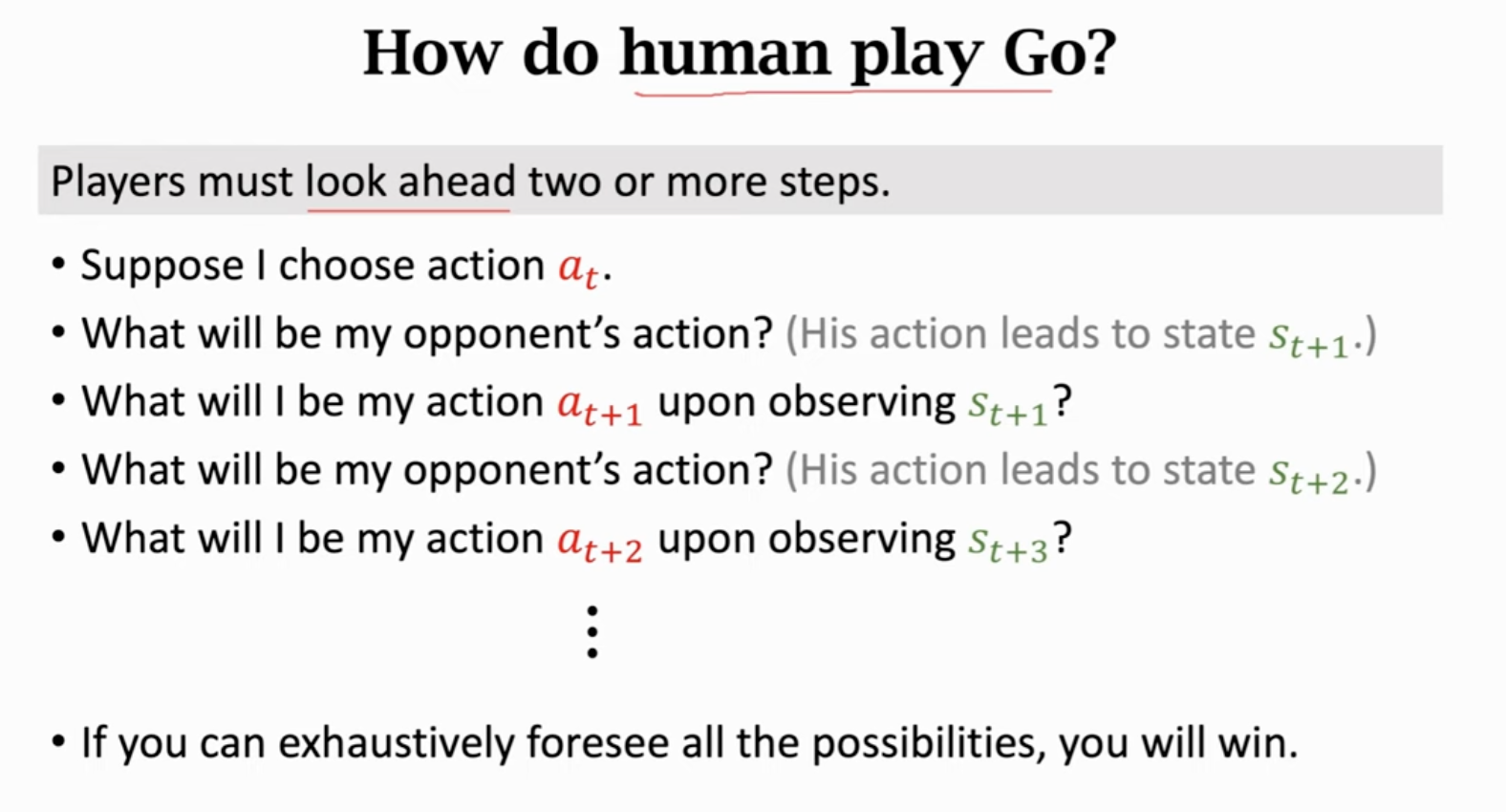
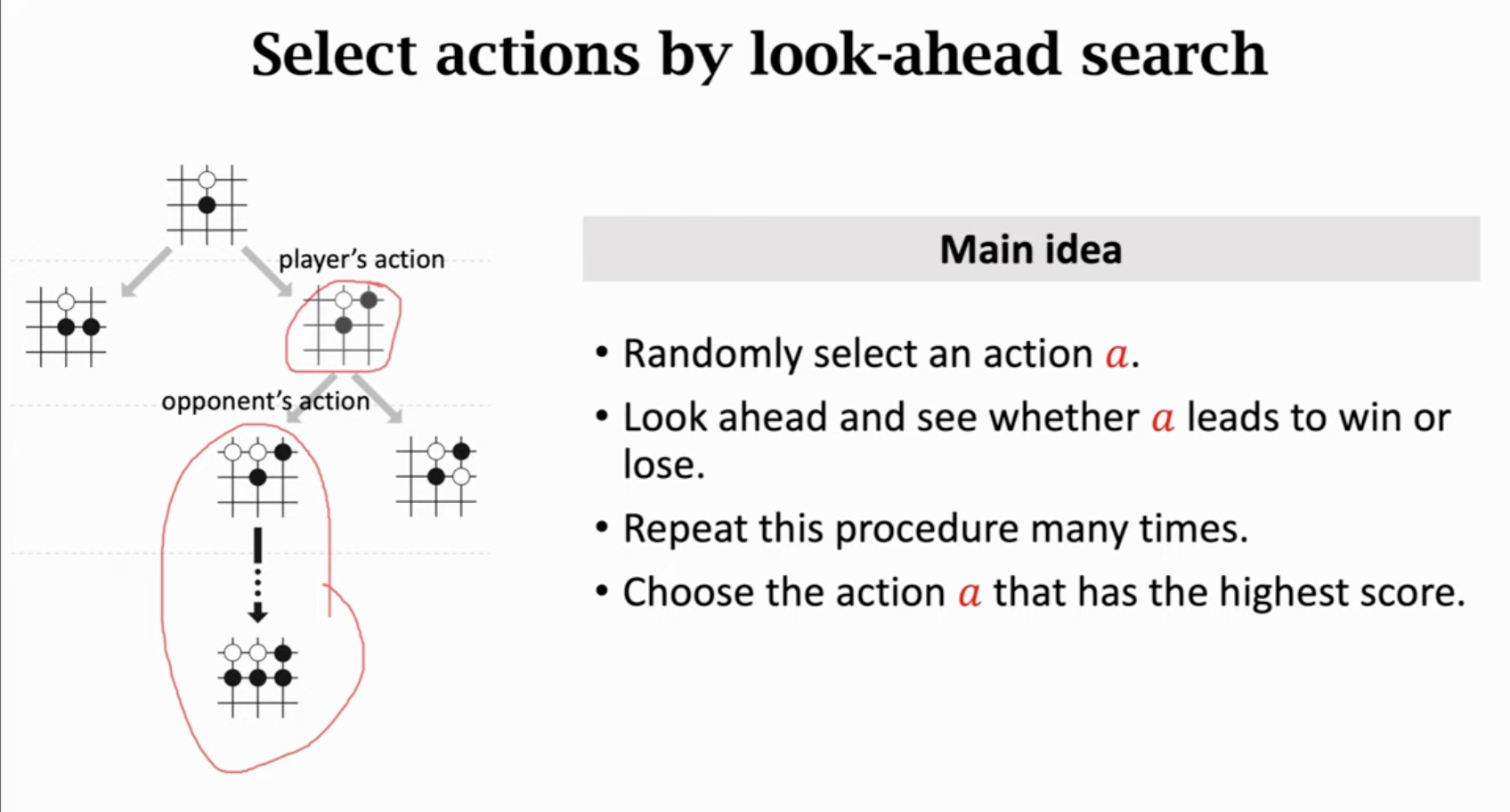
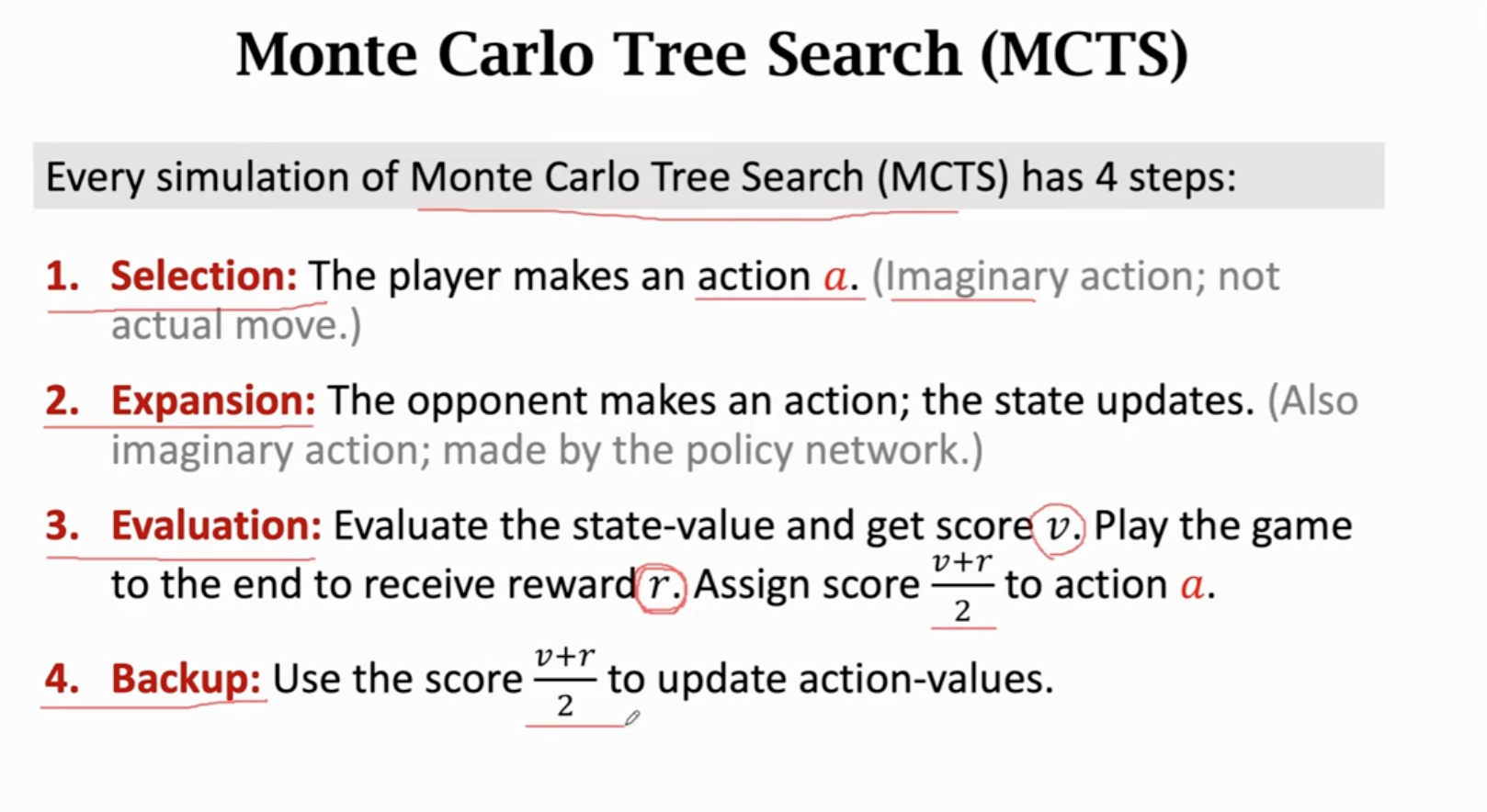
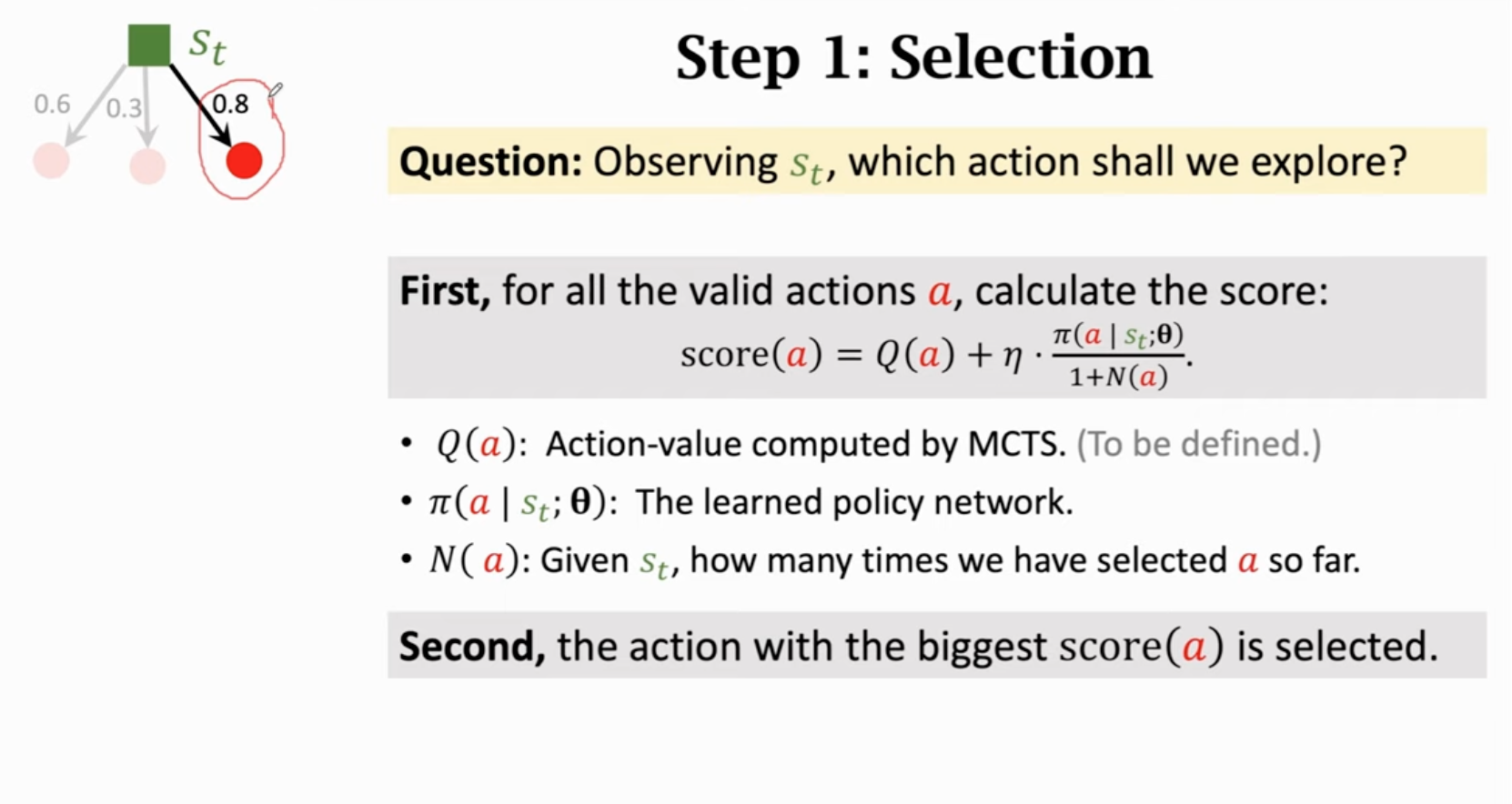
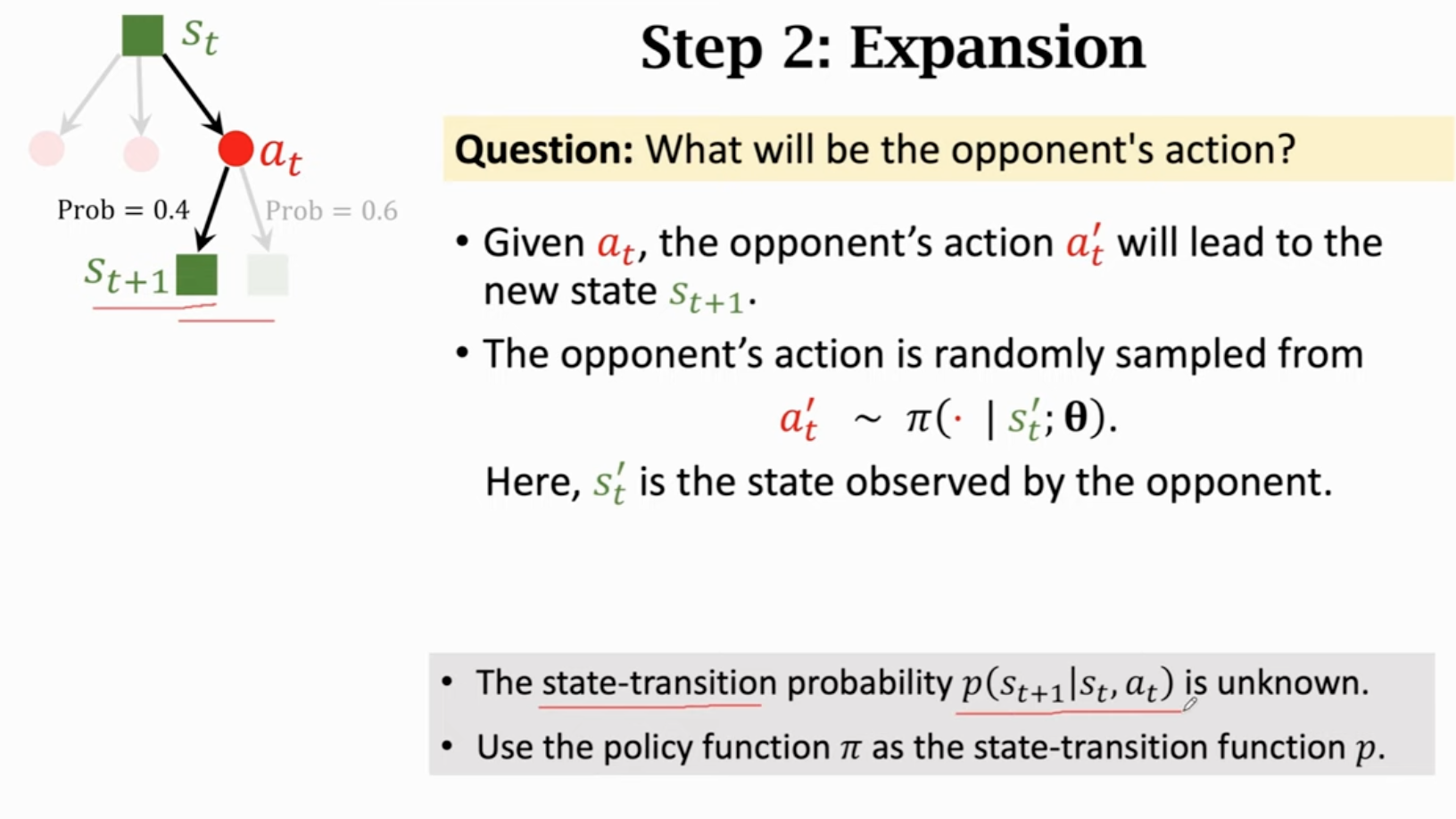
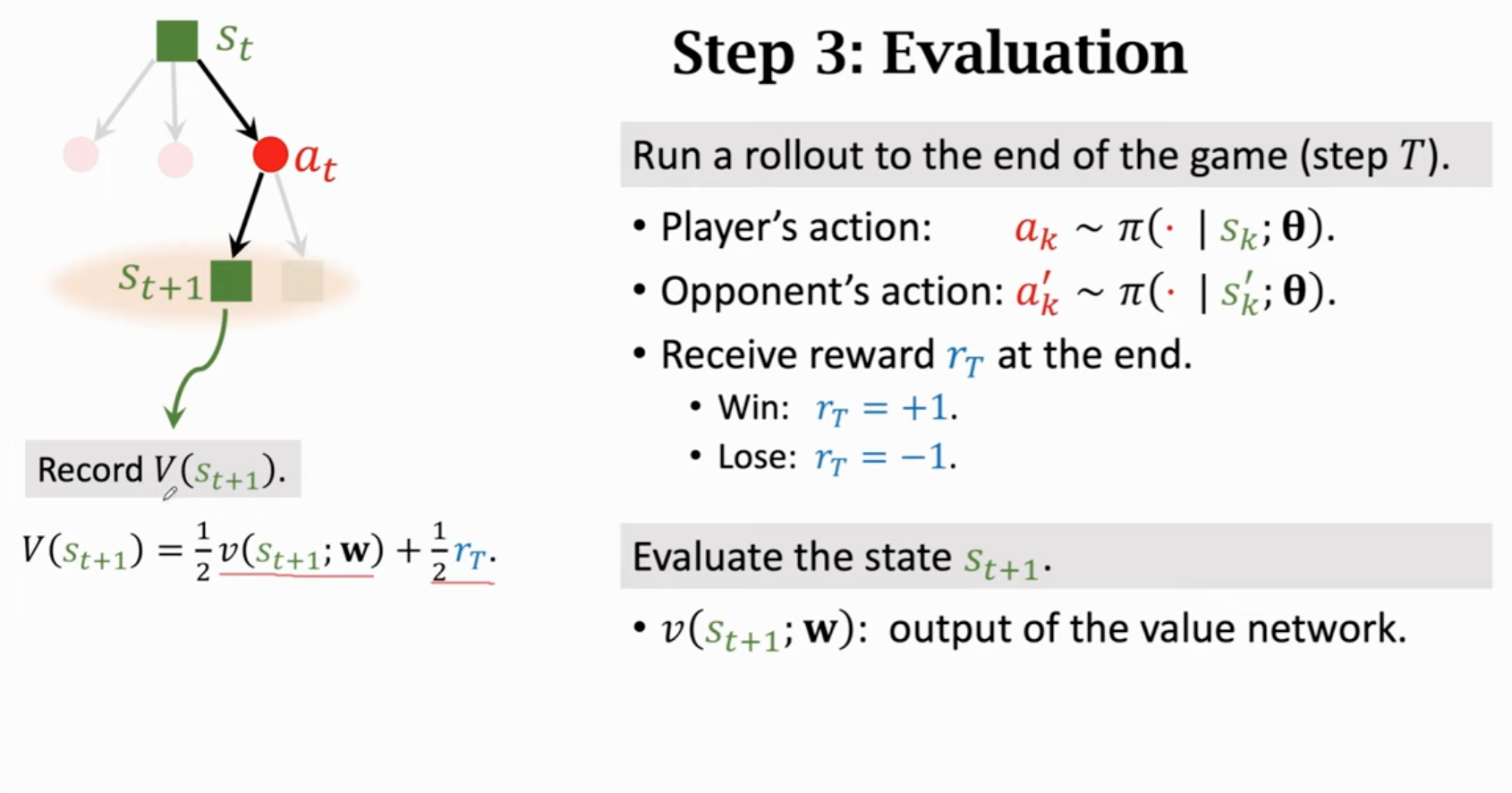
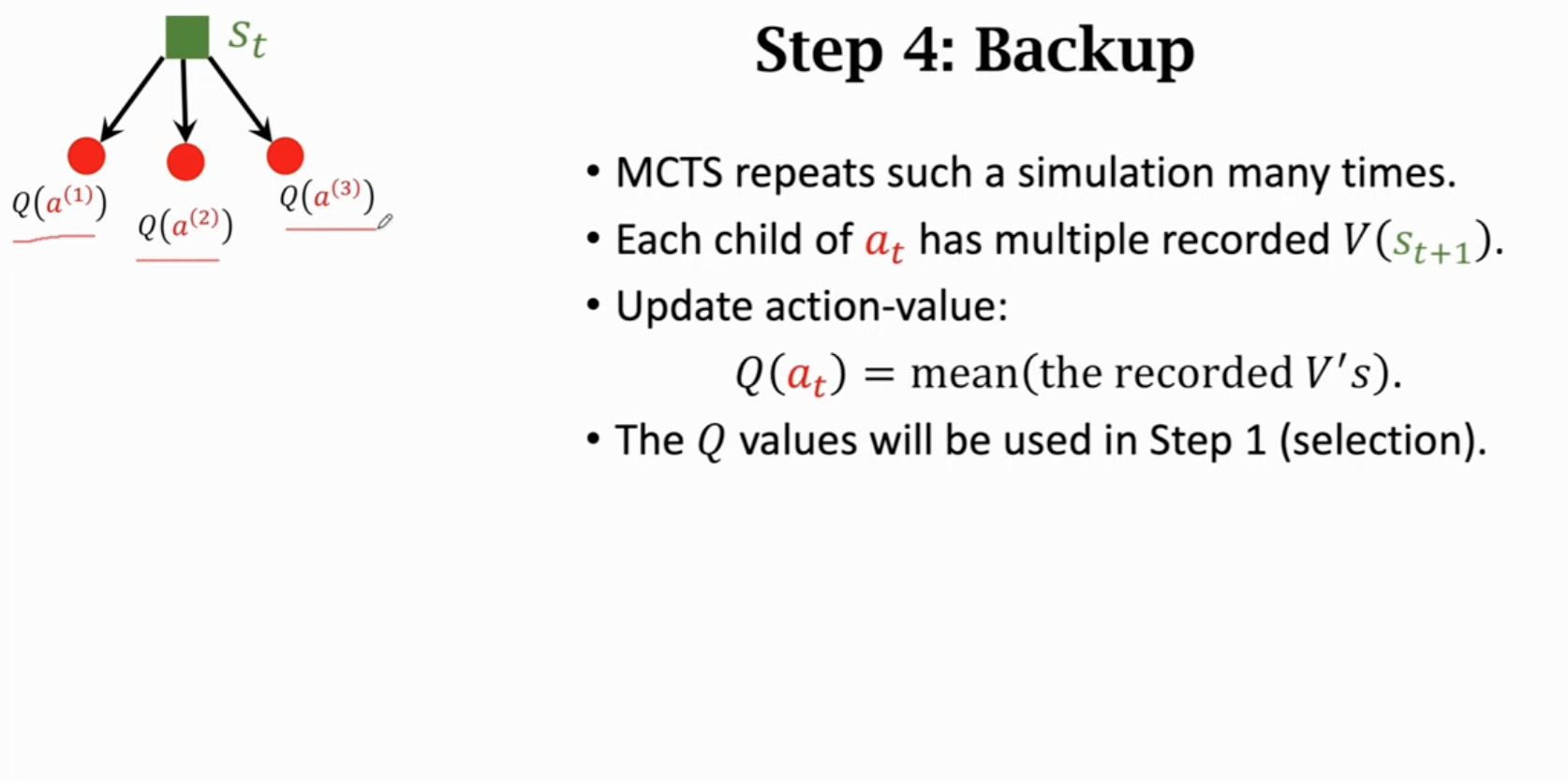
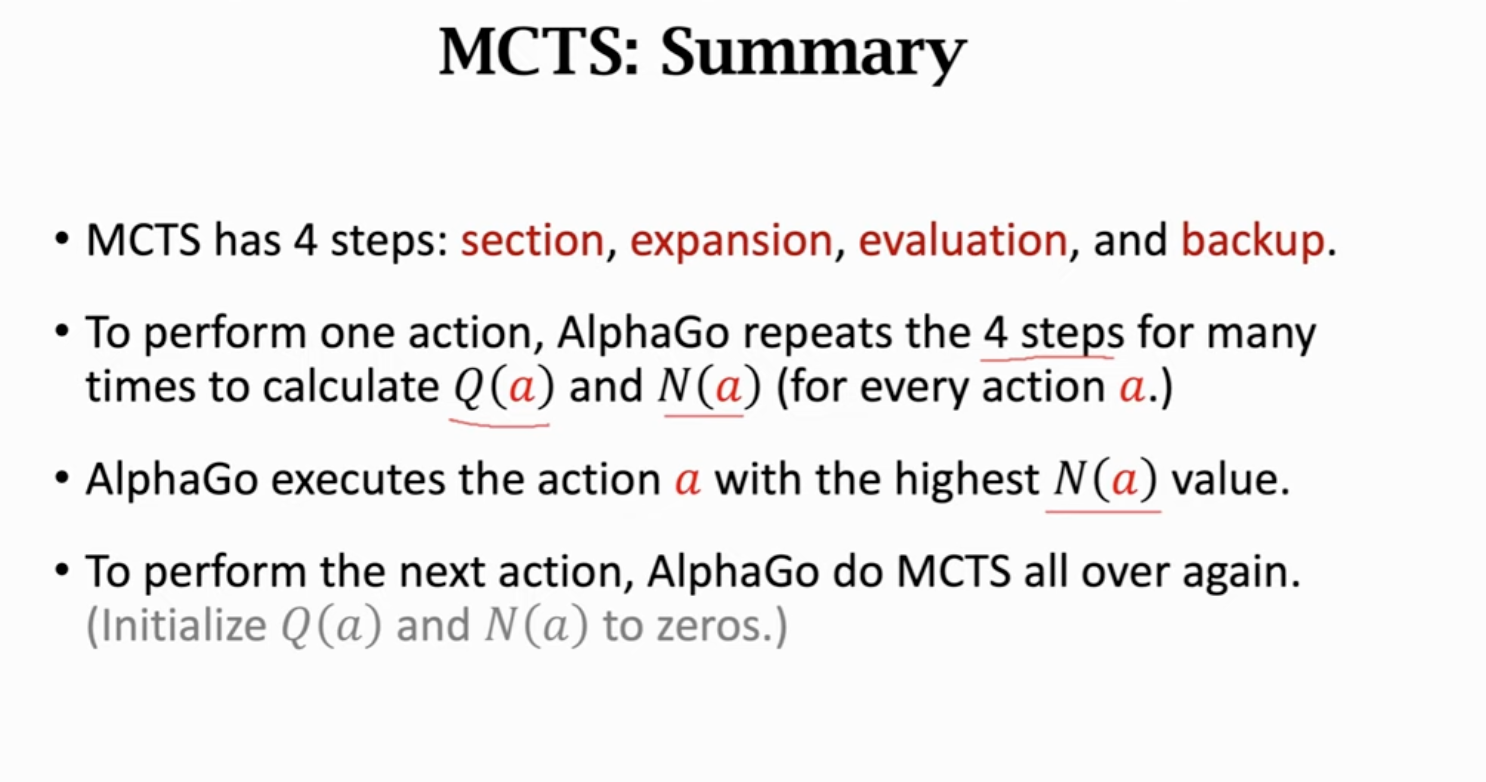
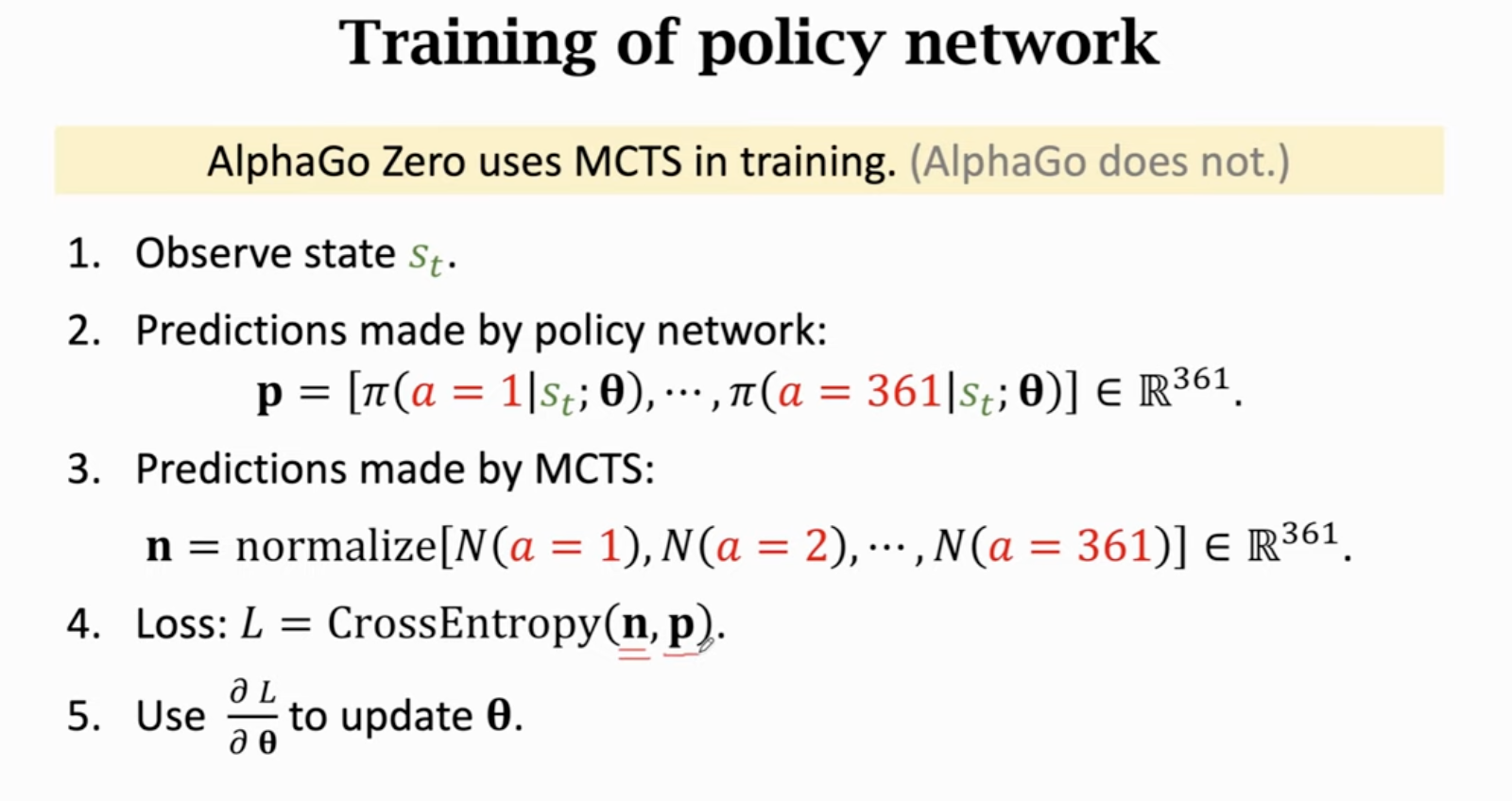
更好的是蒙特卡洛树搜索。为了实现蒙特卡洛树搜索,还需要训练一个价值网络。
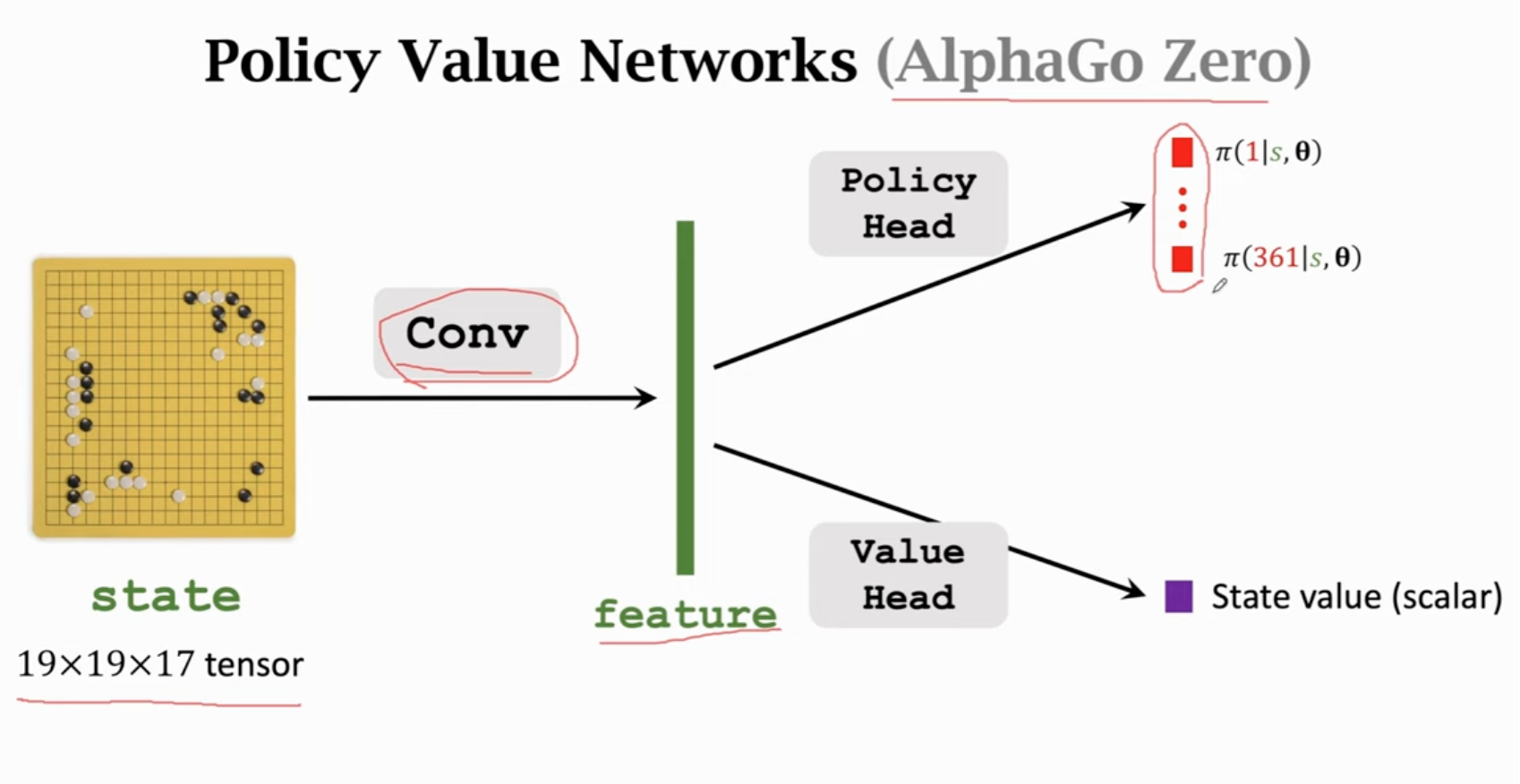
先训练策略网络,再训练价值网络(不是actor-critic方法):
训练过程中,通过训好的策略网络控制Player进行决策。
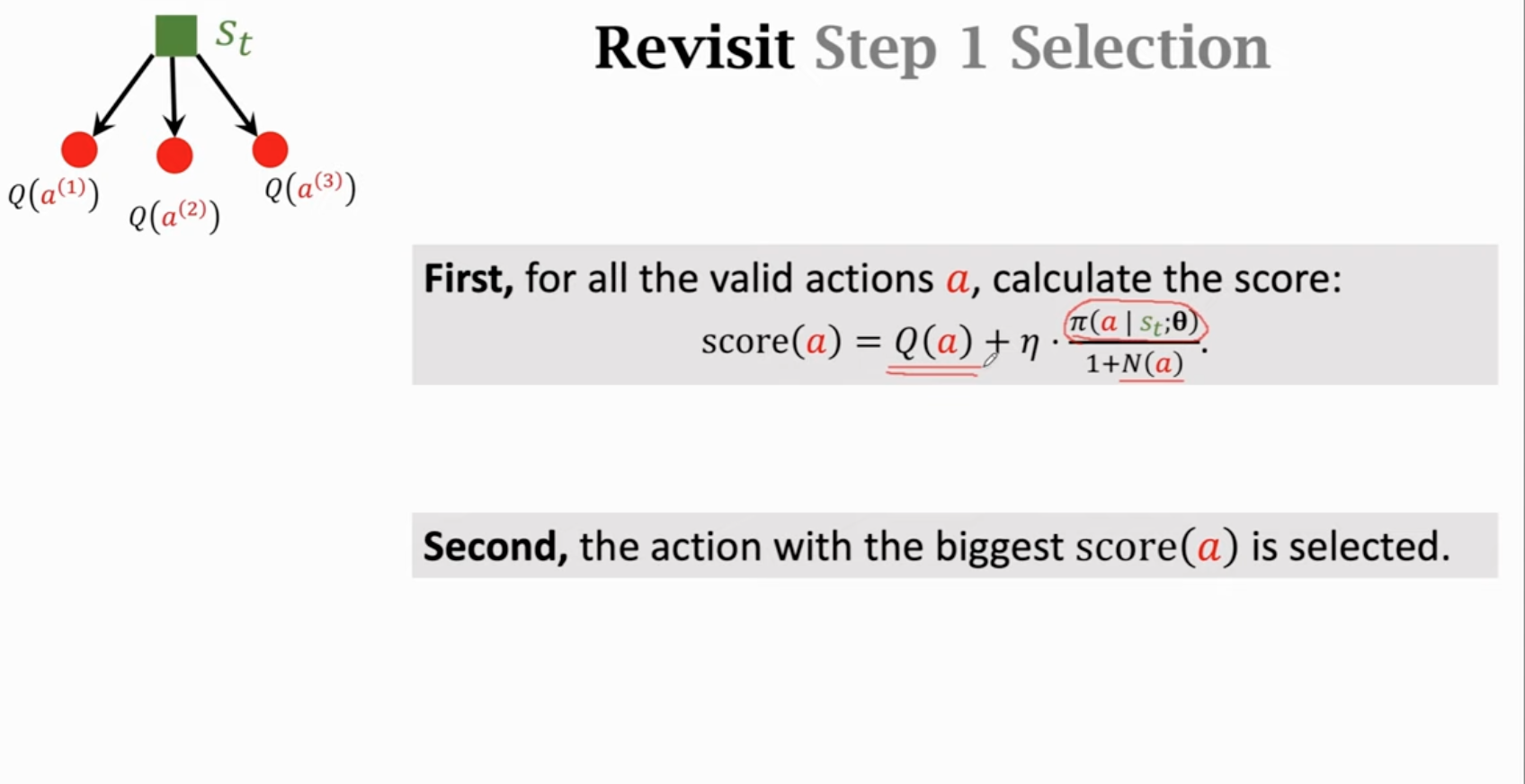
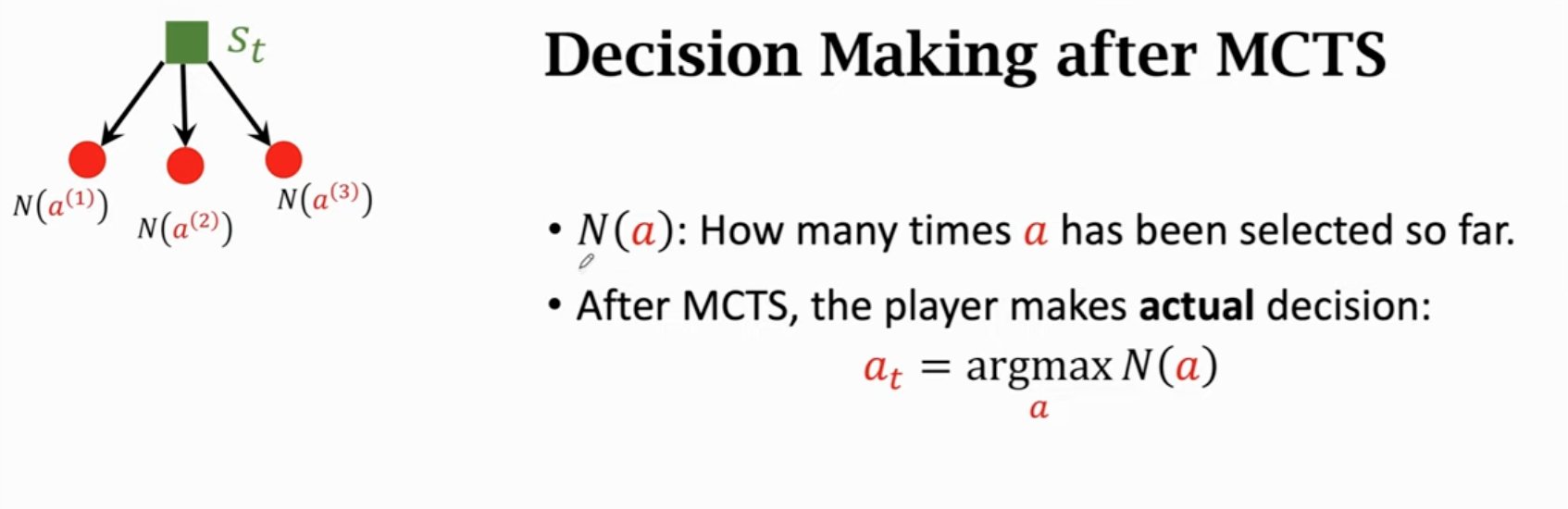
训练好AlphaGo之后,实际下棋的过程中,采用蒙特卡洛树搜索(无需训练)进行决策。



【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 阿里最新开源QwQ-32B,效果媲美deepseek-r1满血版,部署成本又又又降低了!
· 单线程的Redis速度为什么快?
· SQL Server 2025 AI相关能力初探
· AI编程工具终极对决:字节Trae VS Cursor,谁才是开发者新宠?
· 展开说说关于C#中ORM框架的用法!
2020-12-15 牛客编程巅峰赛S2第9场 - 钻石&王者 B. 牛牛和网格三角形
2020-12-15 2019-2020 ICPC Asia Hong Kong Regional Contest B. Binary Tree(思维)
2020-12-15 2019 ICPC Asia-East Continent Final M. Value(状压/枚举)