Pixel Aligned Language Models论文阅读笔记
Motivation & Abs
近年来,大语言模型在视觉方面取得了极大的进步,但其如何完成定位任务(如word grounding等)仍然不清楚。本文旨在设计一种模型能够将一系列点/边界框作为输入或者输出。当模型接受定位信息作为输入时,可以进行以定位为condition的captioning。当生成位置作为输出时,模型对LLM生成的每个输出单词的像素坐标进行回归,从而进行dense grounding。
Method
方法
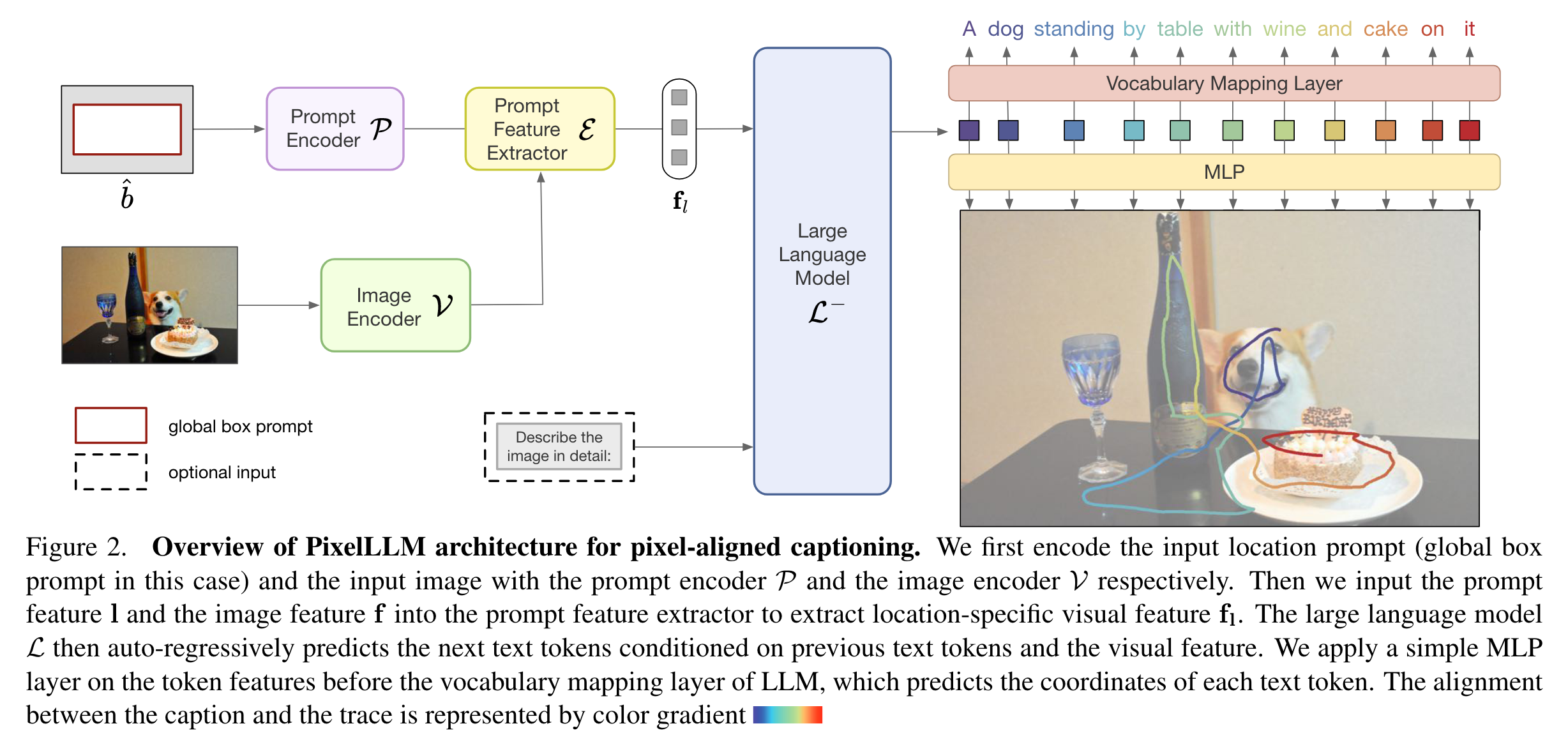
模型输入为图片以及prompt(可选),如果不指定prompt,默认的prompt为(0, 0, H, W)的box。在captioning的过程中,模型除了输出句子外,还需要输出与句子等长的点序列,每个点对应句子中的一个token。与之前的方法不同,本文方法不强制模型忽略非视觉token。
对于视觉端,首先将图像送入image encoder以及将prompt送入prompt encoder,得到图像特征以及提示特征,之后使用prompt feature extractor 得到prompt feature:
其中prompt feature extractor采用类似Q-Former的结构,通过可学习的query提取特征,整体作用类似ROIAlign。
在拿到location-specific的特征后,我们可以将其送入语言模型在进行captioning,使用自回归的decoding方式:。语言模型的最后一个linear为vocabulary mapping layer,将语言空间的特征映射为词汇表的坐标:
因此为了得到与语言模型输出类似的定位信息,作者在vocabulary mapping layer旁添加了一个并行的mlp层,将特征映射为2维定位输出:
额外添加的MLP并不会将梯度反传回语言模型,从而避免损害解码文本的能力。
训练
模型的训练在人类标注的captionlocation aligned数据集Localized Narrative上面进行。损失:

下游任务适配
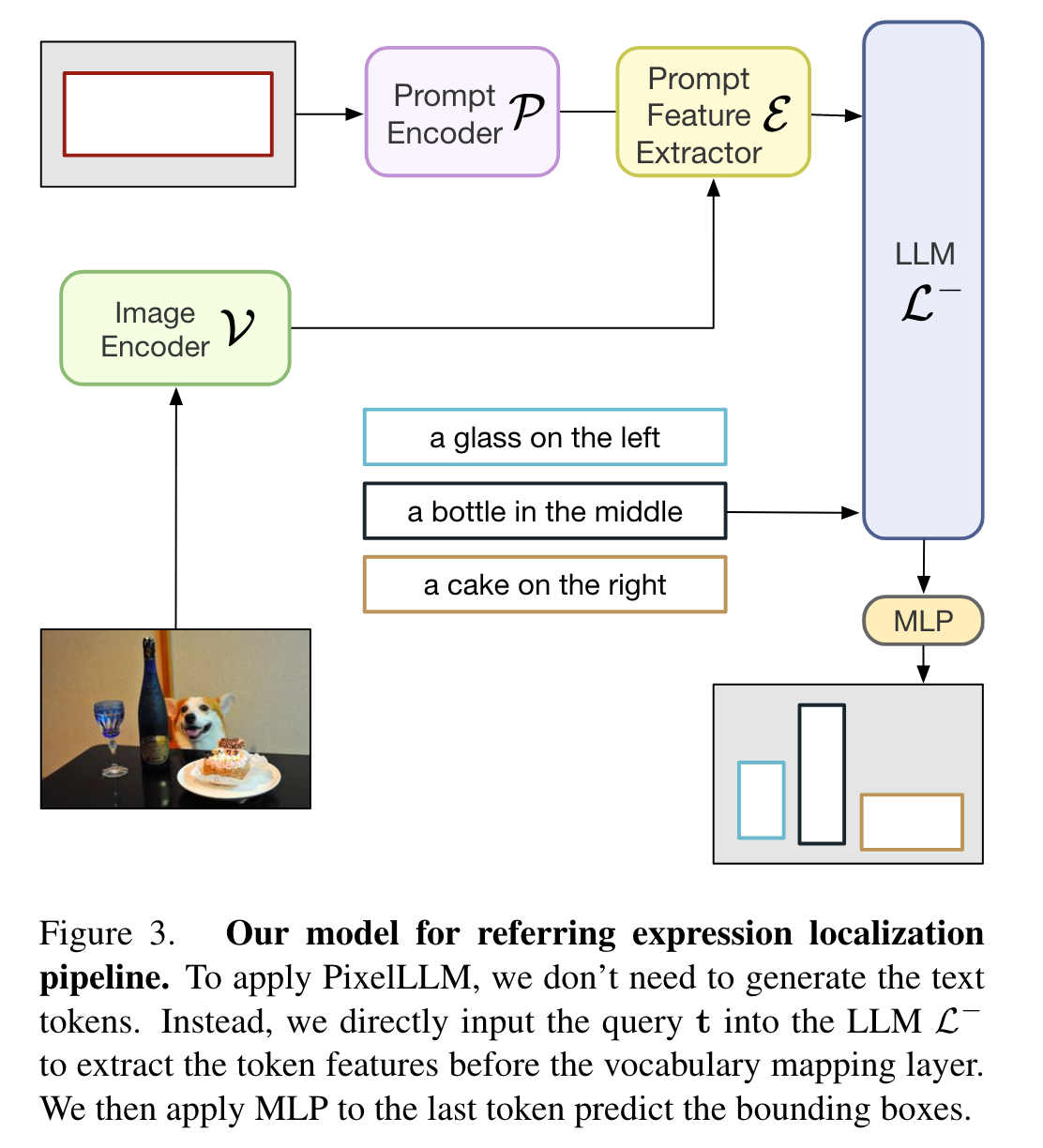
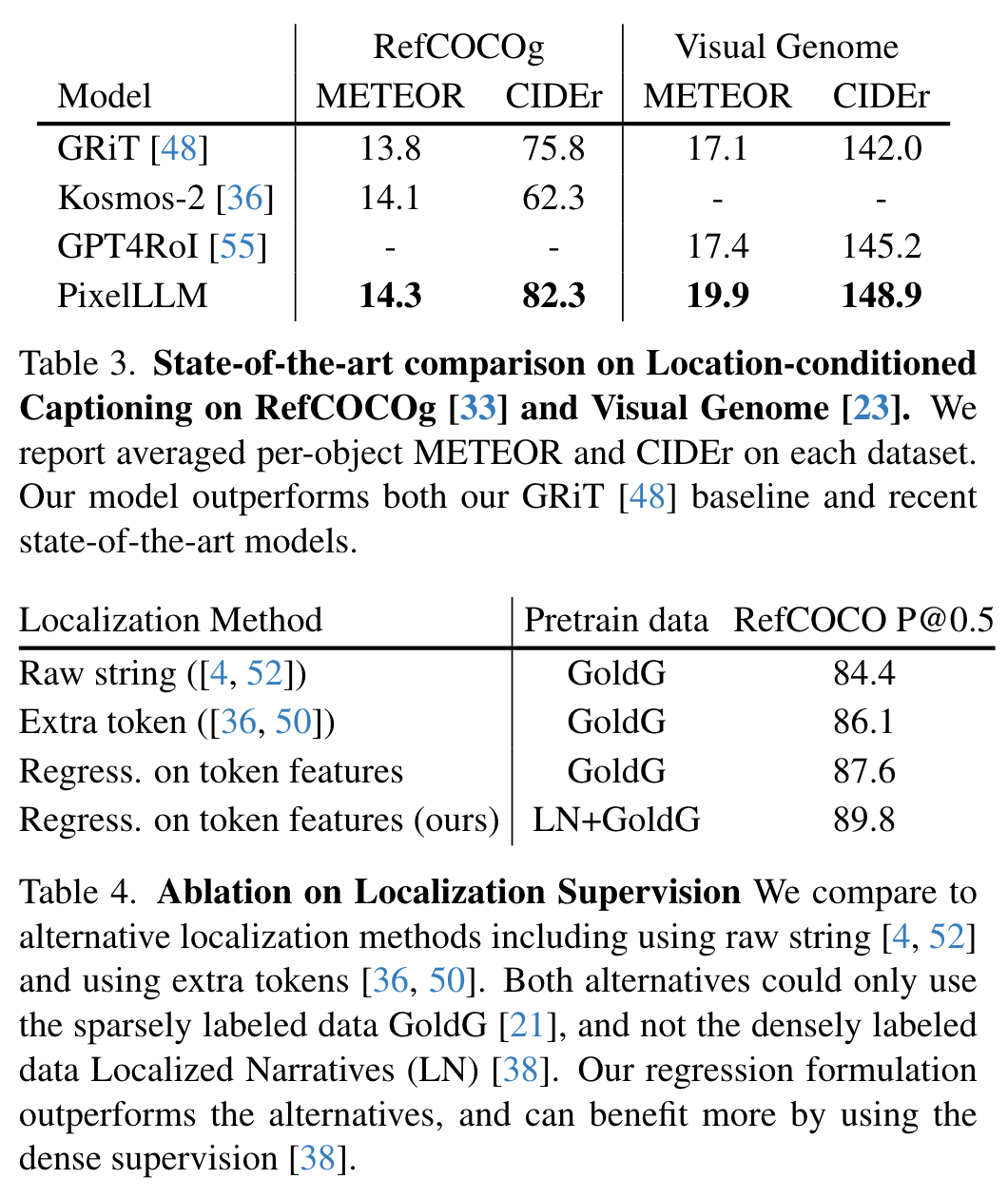
Referring localization and segmentation:虽然可以通过轨迹获得边界框,但这是次优的,因为轨迹边界不是严格的实例边界。因此,作者使用相同的回归 MLP 层训练模型在 <EOS> 标记处输出准确的对象边界框:
同时拿到边界框后,还能通过SAM进行分割。
其它下游任务可以参考原文。
实验



【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 阿里最新开源QwQ-32B,效果媲美deepseek-r1满血版,部署成本又又又降低了!
· 单线程的Redis速度为什么快?
· SQL Server 2025 AI相关能力初探
· AI编程工具终极对决:字节Trae VS Cursor,谁才是开发者新宠?
· 展开说说关于C#中ORM框架的用法!
2021-08-01 CF986B Petr and Permutations(逆序对)
2021-08-01 洛谷P1972 [SDOI2009]HH的项链(莫队)44分做法
2021-08-01 2021牛客暑期多校训练营5 B. Boxes(概率期望)
2021-08-01 2021牛客暑期多校训练营5 K. King of Range(单调队列)详细题解
2020-08-01 深度学习笔记二:卷积神经网络(CNN)