Multiple View Geometry in Computer Vision (Second Edition) 学习笔记-1
第二节 投影几何和二维变换
2.2 The 2D projective plane
-
使用向量表示线段,如表示
-
中的矢量等价类的集合组成射影空间(P即Project),即,中的每个矢量对应着中的一个点,其中不与任何直线对应,被排除在外。
-
当且仅当时,点才在线上。
-
自由度问题:为了指定一个点,必须提供两个值,即其x坐标和y坐标。 以类似的方式,一条线由两个参数(两个独立的比率{a:b:c})指定,因此具有两个自由度。在非齐次表示中,可以选择这两个参数作为直线的梯度和y截距。
-
线段和的交点
如
-
过两个点和的直线
-
所有的理想点都表示为,其特定点由比率指定。
-
无穷远线表示为,从而
-
非齐次表示中,是与直线相切且与直线法线正交的向量,因此表示直线的方向。
-
在2D射影几何中,在射影变换下所有非退化圆锥都是等效的。
-
圆锥曲线方程
非齐次:
齐次:
矩阵形式:
其中
-
是圆锥的齐次表示,圆锥具有五个自由度,可以将其视为比率{a:b:c:d:e:f}。
-
5个点确定一条圆锥曲线
-
在上的点处与相切的直线
2.3 Projective transformations
2D射影几何是对射影平面的属性的研究,这些属性在射影性的一组转换下是不变的。
-
投影性是从到其自身的可逆映射,使得当且仅当相同时,三个点位于同一条线上。
-
映射:当且仅当存在一个非奇异的3×3矩阵,对于由向量表示的中的任何点,都是正确的时候时,才具有投影性。
-
平面投影变换是对由非奇异3×3矩阵表示的齐次3矢量的线性变换
该方程式中出现的矩阵可以通过乘以任意非零比例因子而改变,而不改变投影变换。
因此是齐次矩阵,的9个元素中有8个独立的比率,因此,投射变换具有8个自由度。 -
平面之间的映射:如果在每个平面中定义了一个坐标系,并且点用齐次坐标表示,则中心投影映射可以表示为,其中是非奇数3×3矩阵。它被称为透视性而不是完全投影性,并且可以通过具有六个自由度的变换来表示。(单应变换)
-
在点的变换下,对应的圆锥曲线变换为,双圆锥曲线变换为
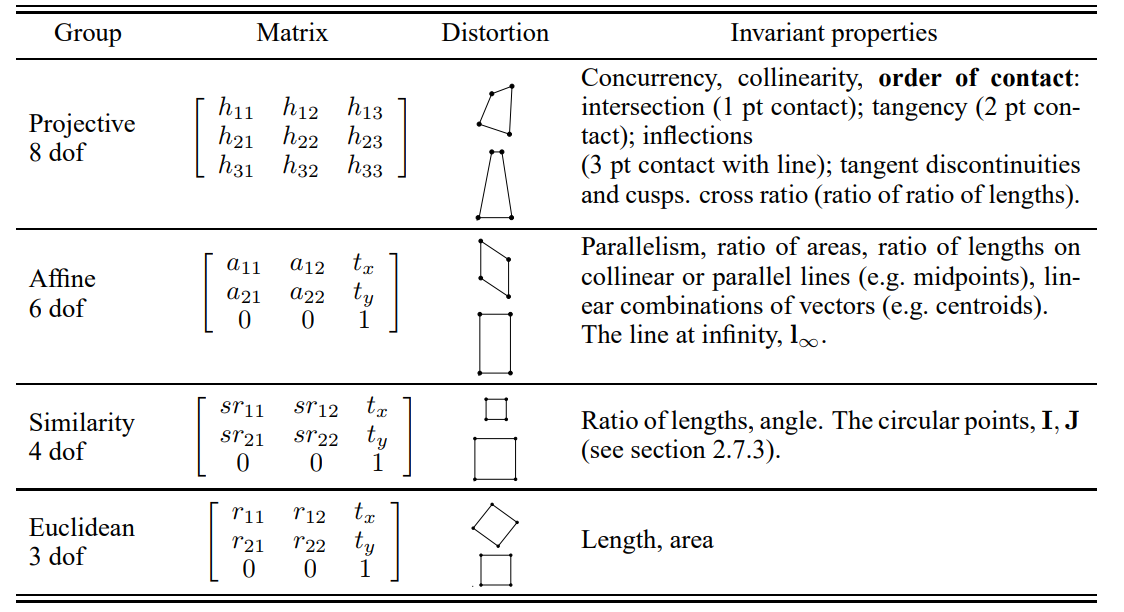
2.4 A hierarchy of transformations
-
等距变换:保留欧几里德距离的平面的变换。
这里的,表示方向(为反转方向)
可以写作矩阵块的形式如:
这里的是的旋转矩阵(正交矩阵),是一个的位移向量。
平面欧几里得变换具有三个自由度,一个用于旋转,两个用于平移。
长度(两点之间的距离),角度(两线之间的角度)和面积是不变的。
-
相似变换:由各向同性缩放组成的等距映射。
可以写作矩阵块的形式如:
标量s代表各向同性标度。
相似变换也称为等式变换,因为保留了“形状”。
平面相似度变换具有四个自由度(3 + s(1) = 4)
线之间的角度不受旋转,平移或各向同性缩放的影响,相似性不变性也不受此影响。长度之比和面积之比是不变的。
-
仿射变换:仿射变换是“线性变换”+“平移”,保持二维图形的“平直性”(straightness,即变换后直线还是直线不会打弯,圆弧还是圆弧)和“平行性”(parallelness,其实是指保二维图形间的相对位置关系不变,平行线还是平行线,相交直线的交角不变。)
可以写作矩阵块的形式如:
这里的是一个2 × 2的非奇异矩阵。
平面仿射变换有6个自由度,对应6个矩阵元素。由三个对应点计算。
仿射矩阵总是可以分解为
其中和分别是和的旋转角度,是是对角矩阵
这个分解由SVD分解得到,,其中和都是正交矩阵。
因此,仿射矩阵A可以理解为先进行角度的旋转然后再(旋转的)x和y方向上分别按λ1和λ2缩放,再依次进行角度的旋转和角度的旋转。
仿射变换有六个自由度,(4 + 缩放方向的角度 + 缩放参数的比率)
仿射变换不能保持原来的线段长度不变,也不能保持原来的夹角角度不变。
仿射变换有三个不变性:(1)平行线(2)平行线段的长度之比(3)面积比
根据的正负决定仿射保留原方向或反转。
-
投影变换:是齐次坐标的一般非奇异线性变换。
这里的
投影变换有8个自由度(总是可以按比例缩放矩阵以使v成为单位 9 - 1 = 8,可以通过四个点的对应关系来计算两个平面之间的投影变换。
-
总结:投影和仿射变换之间的主要区别在于,对于投影变换,向量v不为null,这是投影变换非线性的原因。
比较理想点在仿射和投影变换下的不同。
仿射变换:
投影变换:
可以看到在仿射变化中,理想点保持理想状态(即无穷大)。 在投影变换中,它映射到一个有限点。
-
投影变换的分解:投影变换可以分解为链式的变换。
其中是由A 给出的非奇异矩阵,而是归一化为的上三角矩阵。如果,则此分解有效,如果将s选择为正,则分解是唯一的。
-
函数无关(functionally independent )不变量的数目 配置(configuration)的自由度数 变换(transformation)的自由度数。
-
-
一维的投影几何:
使用 表示 二维向量,线的投影变换由2×2齐次矩阵表示:
具有三个自由度,可以从三个相应的点确定直线的投影变换。
交叉比率:交叉比率是的基本投影不变量:
其中:
(1)交叉比率的值不取决于使用哪个特定的齐次表示点,因为分子和分母的比抵消了尺度。
(2)如果每个点都是有限点,并且选择齐次表示,使得,那么表示到的带符号的距离。
(3)如果其中一个是理想点,则交叉比率的定义依然有效。
(4)交叉比率的值在任何投影变换下不变。
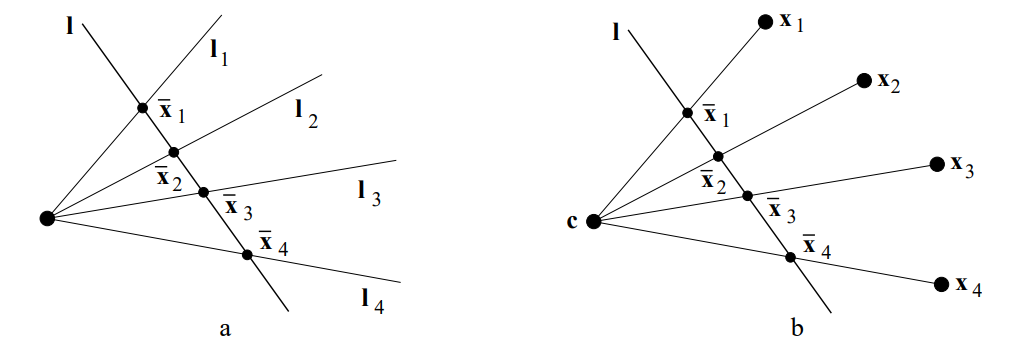
下图说明了具有相等交叉比率的线之间的许多投影变换。
-
共点线:线束交比由射影平面偶像性质得来。即“点”与“直线”为对偶元素,“过一点作一条直线”与“在一条直线上取一点”为对偶作图。
共点的四条线也有交比,根据对偶,共线的四个点有交比。且有对应的四点与四线的交比相等,如图:
-
投影平面的拓扑:
射影平面可以看作是所有齐次三维向量的集合。可以通过乘任何非零因子变换得,这样的点位于的单位球面上。
在中,和表示一个点,尽管它们之间差了一个负号。因此,中的单位球面与投影平面之间存在二对一的对应关系。用拓扑学的语言来说,球体是的双叶覆盖空间。
在拓扑上等同于标识了两个端点的线段,即圆
-
无限线:在投影变换下,理想点可以映射到有限点,因此无穷线可以映射到有限线。然而仿射变换不能做到将无穷映射到有限。
-
在投影变换下,无穷远直线为不动直线的充要条件是为仿射变换。
-
圆点及其对偶:在任何相似变换下,上有两个不动点(称为虚圆点):
圆点是一对复共轭理想点,
对于来说是一样的证明方法。
即:当且仅当是相似变换时,圆点是投影变换下的不动点。
之所以称为“圆点”,是因为每个圆在圆点处相交,在圆锥为圆的情况下:a = c和b = 0,将a和c设置为1,此圆锥在的理想点处与相交,即,该方程的解就是和
与虚圆点对偶的二次曲线
它由两个圆点组成。在欧几里得坐标系统中:
即:当且仅当是相似变换时,对偶二次曲线在投影变换下不变。
(1)有四个自由度:(的齐次对称矩阵(5) - (1) = 4)
(2)是的空向量,从而
-
投影平面上的角度:两条线之间的角度是根据其法线的点积计算得出的。对于线和的法线分别平行于。
角度为:
由于和的前两个分量在投影变换下没有明确定义的变换属性,因此上式在平面的仿射或投影变换后无法应用。
更换形式为:
其中是圆点的圆锥对偶。一旦在投影平面上确定了圆锥,则欧几里德角可以由上式测量。
如果,则线和正交。
-
长度比率:,其中表示和之间的欧氏距离。使用上面的公式,对于任何指定了的投影帧,和可以由计算而来。因此,可以从投影映射点确定以及比率。
-
如果点变换,则
显然,射影分量和仿射分量是直接从的图像确定的,但相似度分量不能确定。
-
度量校正:假设已对图像进行仿射校正,则我们需要两个约束条件来指定圆点的2个自由度,以便确定度量校正。这两个约束可以从世界平面上两个成像的直角获得。
-
假设仿射校正图像中的线对应于世界平面上的正交线对。通过,并且根据上面的公式,使得,可以得到:
这是对矩阵的线性约束。 矩阵是对称的,具有三个独立元素,因此具有2个自由度(因为总体缩放比例不重要)
公式可以简化为:
-
一个点和一个曲线定义了一条线,线称为相对于的极点,点是相对于的极点。
相对于圆锥的点的极线在两个点上相交于圆锥。在这些点处与相切的两条线在处相交。
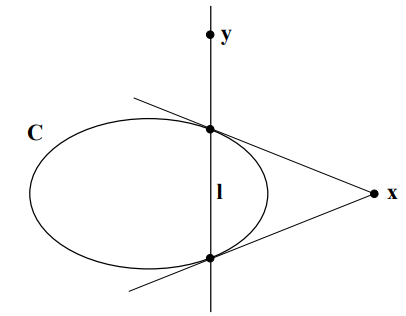
如果点在上,则极点是在x处与圆锥曲线的切线。
-
关联:从的点到的线的可逆映射。由3×3非奇异矩阵表示为
共轭点:如果点在线上,则。
满足的任意两点相对于圆锥是共轭的。
如果在的极点上,则在的极点上。
第三节 投影几何和三维变换
3.1 点和投影变换
-
三维空间点的齐次表示形式,其中若则为无穷点。
-
作用于的投影变换是对由非奇异4×4矩阵表示的齐次四维向量的线性变换:
-
三维空间中的平面可以写成
只有三个独立的平面系数比率有效,所以平面在三维空间中有三个自由度。
表示点在平面上:
的前三个分量对应于欧几里得几何的平面法线。
使用非齐次表示为,其中,在这种形式下,表示平面到原点的距离。
-
假设三个点在平面上,每个点都满足,联立得到以下形式:
由于是线性独立的由点作为行组成的3×4矩阵的秩为3。
-
定义矩阵由一个普通点和三个在面上的点组成。
当在平面上时,
如下:
其中是由矩阵的行形成的行列式。
对于平面上的点,,所以平面的系数为
例如:假设 ,其中
计算
对于其他的计算类似,最终得到:
则平面法线为:
-
在点变换下,平面的变换为:
-
一条线可以通过其与两个正交平面的交点来指定。 每个交叉点都有2个自由度,这表明IP3中的一条线总共有4个自由度。

-
平面上的点可以表示为:
其中是的矩阵,其列形成了的秩为3的零空间。
不是唯一的,假设平面,并且是非零的向量,那么,其中
-
假设两条直线分别有点和,那么当且仅当这四个点共面的时候,两条线会相交,其充要条件为:
所以,当且仅当时,和才会相交(共面)。
-
二次曲面:
其中Q是对称4×4矩阵。


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· AI与.NET技术实操系列:基于图像分类模型对图像进行分类
· go语言实现终端里的倒计时
· 如何编写易于单元测试的代码
· 10年+ .NET Coder 心语,封装的思维:从隐藏、稳定开始理解其本质意义
· .NET Core 中如何实现缓存的预热?
· 25岁的心里话
· 闲置电脑爆改个人服务器(超详细) #公网映射 #Vmware虚拟网络编辑器
· 零经验选手,Compose 一天开发一款小游戏!
· 因为Apifox不支持离线,我果断选择了Apipost!
· 通过 API 将Deepseek响应流式内容输出到前端