PnP学习笔记(更新ing)
PnP
- 给定:一张已知特征点3D位置的图像,一张二维图像。
- 已知:特征点在世界坐标系(指的是相机最初位置的那个坐标系)下的三维坐标,特征点映射到图像上的二维坐标,三维坐标系中的特征点与二维图像上的匹配关系。
- 未知:相机坐标系在世界坐标系下的位姿,特征点在相机坐标系下的深度。
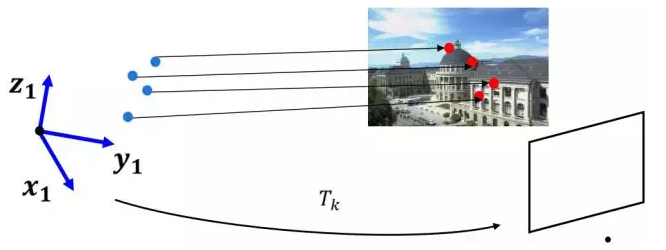
- 最初使用对极几何,初始化出特征点的深度。对于后续的二维图像,当前帧与之前帧进行特征点匹配。匹配到的点若之前已经估计出深度,就知道了世界坐标系下的三维坐标和当前帧二维点的匹配关系,可以用PNP求解当前帧的相机,相对于世界坐标系的位姿变换。
直接线性变换(DLT)
考虑某个空间点P,它的齐次坐标为\(P = (X,Y,Z,1)^T\)。在图像\(I_1\)中,投影找到特征点\(x_1 = (u_1,v_1,1)^T\)(以归一化平面齐次坐标表示)。此时,相机的位姿\(R,t\)是未知的。与单应矩阵的求解类似,我们定义增广矩阵\([R|t]\)为一个\(3 \times 4\)的矩阵,包含了旋转和平移信息。展开形式如下:
用最后一行把s消去,得到两个约束
定义\(T\)的行向量:
于是有
\(t\)是待求的变量,可以看到,每个特征点提供了两个\(t\)的线性约束。假设一共有\(N\)个特征点,则可以列出如下线性方程组:
\(t\)一共有12维,因此最少通过6对匹配点即可实现矩阵\(T\)的线性求解,这种方法称为\(DLT\),当匹配点大于6对时,用\(SVD\)对超定方程求最小二乘数
需要解释的是,这里的\(x_1\)使用了归一化平面坐标,去掉了内参矩阵K的影响——因为内参\(K\)在SLAM中假设为已知,即使内参未知也可以用PnP来估计\(K,R,t\)三个量
P3P
仅利用3对匹配点,对数据要求较少
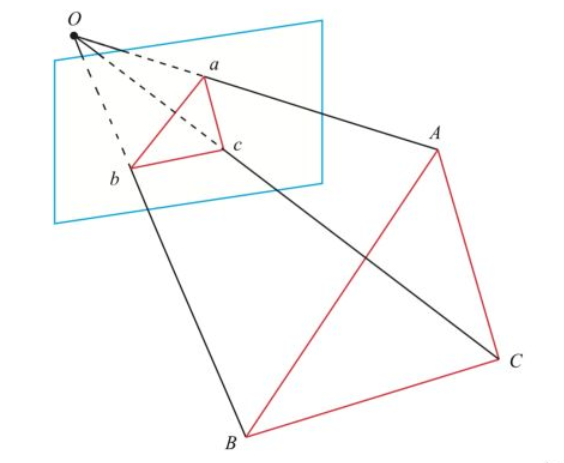
P3P需要利用给定的3个点的几何关系。\(ABC\)为三个世界坐标中的点,\(abc\)为\(ABC\)投影在图像上的点。已知ABC的世界坐标系中的坐标,\(abc\)的相机坐标系坐标。O为相机中心,三角形\(Oac\)和\(OAC\),\(Oab\)和\(OAB\),\(Obc\)和\(OBC\)两两相似。
此外,P3P需要使用一对验证点,记验证点对为\(D-d\)
根据余弦定理:
令\(v = \frac{AB^2}{OC^2}\),\(uv = \frac{BC^2}{OC^2}\),\(wv = \frac{AC^2}{OC^2}\),有:
整理得:
其中\(x,y\)未知,也就是\(A,B,C\)在相机坐标系下的坐标\(OA,OB,OC\)的长度未知。
方程最多得到四个解,用于验证点来计算最可能的解,得到\(3D\)坐标。之后可以求解两组\(3D\)坐标系之间的\(R,t\)。
存在的问题:
- 只利用三个点的信息,多于三个点时,难以利用。
- 存在误匹配或噪声,则失效。
Bundle Adjustment
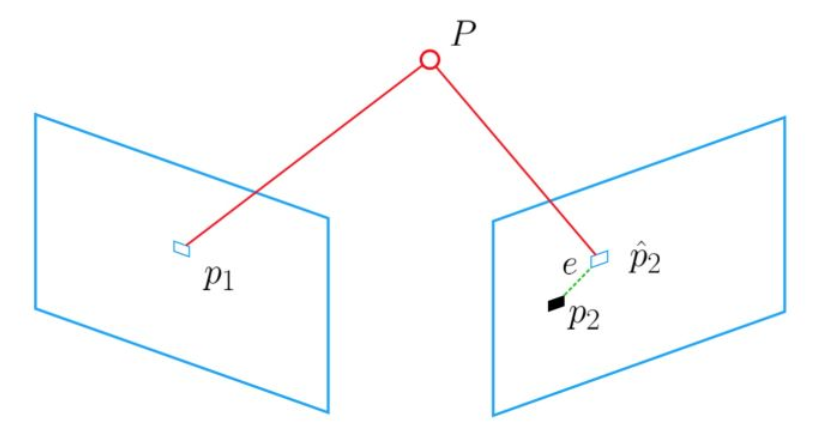
Bundle Adjustment的思想是通过最小化重投影误差,求解位姿。
原本\(P\)的投影点应该是\(P_1\)和\(P_2\) ,但是由于误差的存在,观测到\(P\)在图像2上的投影点是 \(\hat{P_2}\) ,观测值和实际值的误差记为\(e\)。通过调整相机的位姿,来找到\(e\)的最小值,认为使误差最小的位姿就是真实的相机运动。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号