Harris角点
参考自:https://blog.csdn.net/yizhang_ml/article/details/86994193
https://www.cnblogs.com/zyly/p/9508131.html
https://www.cnblogs.com/Tang-tangt/p/9526913.html
https://www.cnblogs.com/riddick/p/8463763.html
Harris角点
角点:
通常意义上来说,**角点就是极值点,即在某方面属性特别突出的点,是在某些属性上强度最大或者最小的孤立点、线段的终点。更简单来说,有两个方向有变化的点叫做角点。
关于角点的具体描述如下:
- 一阶导数(即灰度的梯度)的局部最大所对应的像素点;
- 两条及两条以上边缘的交点;
- 图像中梯度值和梯度方向的变化速率都很高的点;
- 角点处的一阶导数最大,二阶导数为零,指示物体边缘变化不连续的方向。
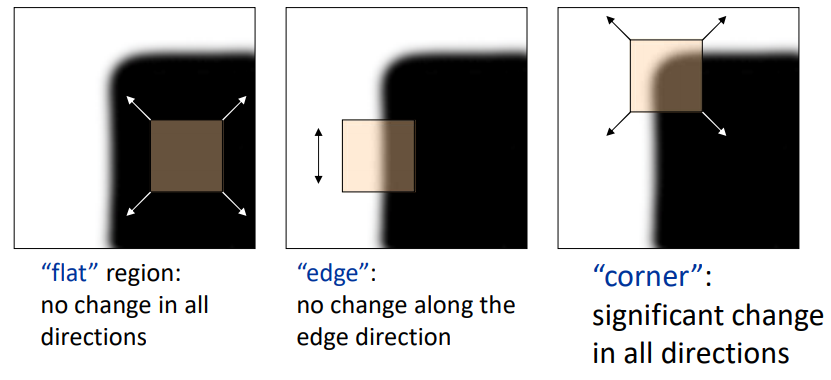
如何识别角点?
使用一个固定窗口(取某个像素的一个邻域窗口)在图像上进行任意方向上的滑动,比较滑动前与滑动后两种情况,窗口中的像素灰度变化程度,如果存在任意方向上的滑动,都有着较大灰度变化,那么我们可以认为该窗口中存在角点。
数学描述:
公式:
参数解释:
- \([u,v]\)是窗口\(W\)的偏移量
- \((x,y)\)是窗口\(W\)所对应的像素坐标位置,窗口有多大,就有多少个位置
- \(I(x,y)\)是像素坐标位置\((x,y)\)的图像灰度值
- \(I(x+u,y+v)\)是像素坐标位置\((x+u,y+v)\)的图像灰度值
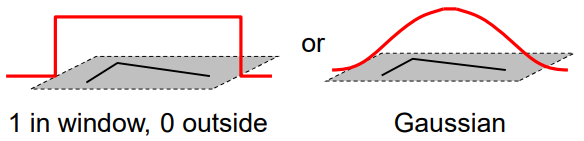
- \(w(x,y)\)是窗口函数,评估每个点的差异值对总能量的贡献
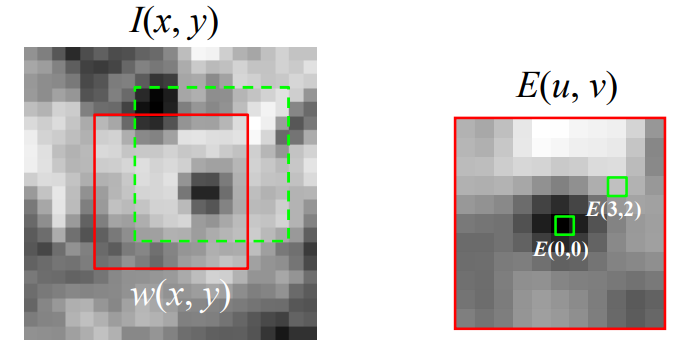
通过分析\((u,v)\)和\(E(u,v)\)的关系分析当前点是否为角点。
如何让\((u,v)\)和\(E(u,v)\)建立直接的联系呢?\(\longrightarrow\)泰勒展开式
因此:
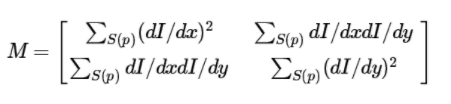
最终可得\(M\)是\(2 \times 2\)的矩阵,M矩阵决定了\(u,v\)对\(E(u,v)\)的影响,因此分析\(M\)即可分析\(E(u,v)\)的特性
假设\(I_xI_y\)互不影响,即移动是水平垂直的(无旋转)

将角点问题转换成求M矩阵的特征值的问题:如果特征值都不等于0,则一定是角点!
\(E(u,v) \longrightarrow taylor \longrightarrow M \longrightarrow \lambda_1,\lambda_2\)
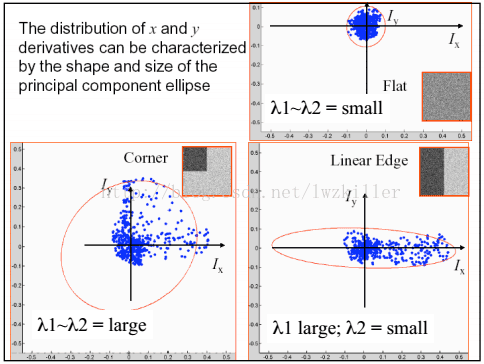
代入式子后,图像可表示为一个正椭圆\(E(u,v) = \frac{u^2}{\frac{1}{\lambda_1}} + \frac{v^2}{\frac{1}{\lambda_2}}\)
如果是一个带有旋转的椭圆
即\(M = \left[\begin{matrix}a & b \\ c & d\end{matrix}\right]\)(不是水平垂直的,有旋转),则M一定为实对称矩阵,可以进行分解(R是正交的,可以认为是旋转矩阵)
几何意义来看
由于旋转矩阵\(R^{-1} = R^T\),那么

这样就可以变成正常的\(\left[\begin{matrix} \lambda_1 & 0\\ 0 & \lambda_2 \end{matrix} \right]\)的形式了
M矩阵的变量和最终获得信息之间的关系:
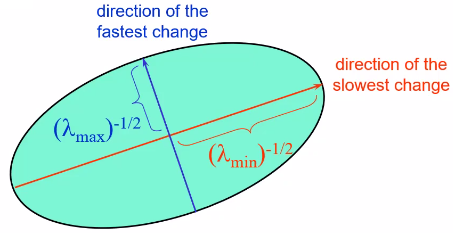
\(\sqrt\lambda_1、\sqrt\lambda_2\)为椭圆的长短轴,\(R\)是椭圆的旋转矩阵(将椭圆转成正的),短轴方向是变化激烈的方向,长轴方向是变化缓慢的方向
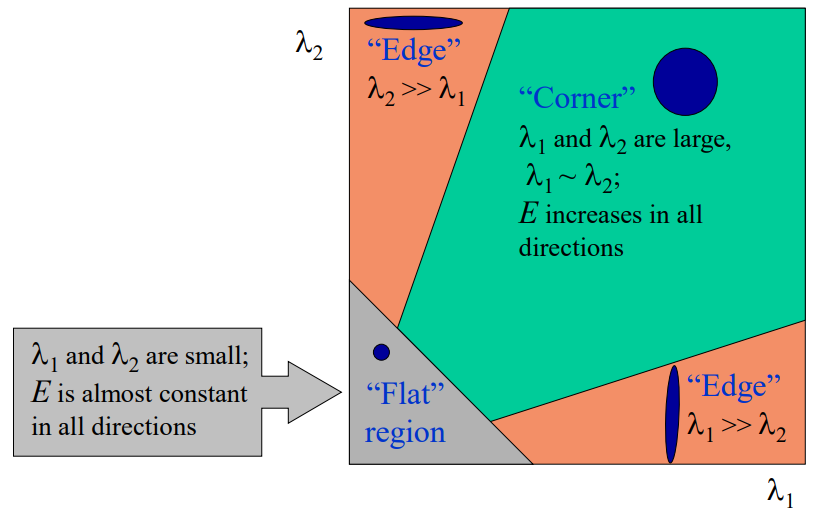
因此最终的情况变成:
如何进行简化计算呢?将计算\(\lambda\)改为计算R

步骤:
-
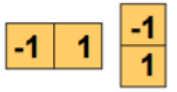
计算每个像素的x,y方向的偏导\(I_x,I_y\)
\[I_x = \frac{\partial I}{\partial x} = I \otimes (-1\quad 0\quad 1)\\ I_y = \frac{\partial I}{\partial y} = I \otimes (-1\quad 0\quad 1)^T \] -
计算每个点的二阶矩矩阵
\[M = R^{-1} \left[ \begin{matrix} \lambda_1 & 0\\ 0 & \lambda_2 \end{matrix} \right] R \] -
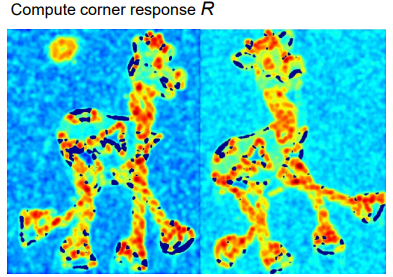
计算R值
\[R = det(M) - \alpha trace(M)^2 = \lambda_1\lambda_2 - \alpha(\lambda_1 + \lambda_2)^2 \] -
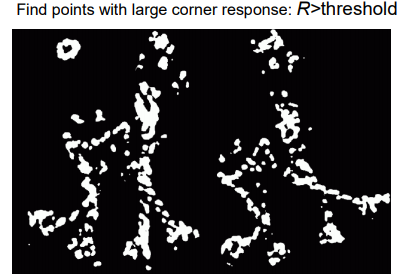
当R大于门限时,认为是可能的角点
-
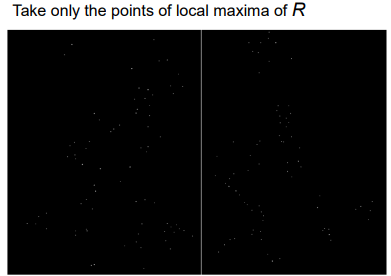
非最大化抑制


性质:
-
参数k对角点检测的影响
假设已经得到了矩阵\(M\)的特征值\(\lambda_1 \ge \lambda_2 \ge 0\),令\(\lambda_2 = k \lambda_1,0 \le \alpha \le 1\),则
\[R = \lambda_1 \lambda_2 - \alpha(\lambda_1 + \lambda_2)^2 = \lambda_1(k - \alpha(1+k)^2) \]假设\(R \ge 0\),则有
\[0 \le \alpha \le \frac{k}{(1+k)^2} \le 0.25 \]对于较小的\(k\)值,\(R \approx \lambda_1(k - \alpha),k < \alpha\)
由此,可以得出这样的结论,增大\(\alpha\)的值,降低角点检测的灵敏度,减少被检测角点的数量;减少\(\alpha\)值,增加角点检测的灵敏度,增加被检测角点的数量。
-
Harris角点检测算子对亮度和对比度的变化不灵敏
这是因为在进行Harris角点检测时,使用了微分算子对图像进行微分运算,而微分运算对图像密度的拉升或收缩和对亮度的抬高或下降不敏感。换言之,对亮度和对比度的仿射变换并不改变Harris响应的极值点出现的位置,但是,由于阈值的选择,可能会影响角点检测的数量。
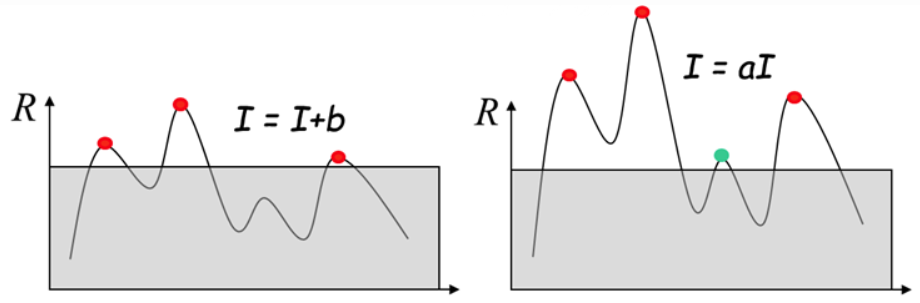
左图表示亮度变化,右图表示对比度变化
-
Harris角点检测算子具有旋转不变性
Harris角点检测算子使用的是角点附近的区域灰度二阶矩矩阵。而二阶矩矩阵可以表示成一个椭圆,椭圆的长短轴正是二阶矩矩阵特征值平方根的倒数。当特征椭圆转动时,特征值并不发生变化,所以判断角点响应值RR也不发生变化,由此说明Harris角点检测算子具有旋转不变性。
-
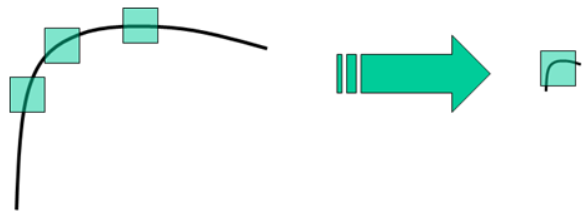
Harris角点检测算子不具有尺度不变性
当图像被缩小时,在检测窗口尺寸不变的前提下,在窗口内所包含图像的内容是完全不同的。左侧的图像可能被检测为边缘或曲线,而右侧的图像则可能被检测为一个角点。
代码实现
主要函数cornerHarris
void cornerHarris(InputArray src, OutputArray dst, int blockSize, int ksize, double k, int borderType=BORDER_DEFAULT)
参数:
- src:输入的图像(灰度图)
- dst:函数调用后的运算结果存在这里,即这个参数用于存放Harris角点检测的输出结果,和源图片有一样的尺寸和类型。
- blockSize:邻域大小
- ksize:sobel求取微分时的窗口大小
- k:Harris 角点检测方程中的自由参数,取值参数为 [0.04,0.06]
完整程序
#include "opencv2/highgui.hpp"
#include "opencv2/imgproc.hpp"
#include <iostream>
using namespace cv;
using namespace std;
Mat src, src_gray;
int thresh = 100;
int max_thresh = 255;
const char* source_window = "Source image";
const char* corners_window = "Corners detected";
void cornerHarris_demo( int, void* );
int main( int argc, char** argv )
{
src = imread("qipan.jpg",CV_LOAD_IMAGE_COLOR);
if ( src.empty() )
{
cout << "Could not open or find the image!\n" << endl;
return -1;
}
cvtColor( src, src_gray, COLOR_BGR2GRAY ); //把图像转换为灰度图
namedWindow( source_window );
createTrackbar( "Threshold: ", source_window, &thresh, max_thresh, cornerHarris_demo ); //创建一个调整阈值的工具条
imshow( source_window, src );
cornerHarris_demo( 0, 0 );
waitKey();
return 0;
}
void cornerHarris_demo( int, void* )
{
int blockSize = 2;
int apertureSize = 3;
double k = 0.04;
Mat dst = Mat::zeros( src.size(), CV_32FC1 );
//角点检测
cornerHarris( src_gray, dst, blockSize, apertureSize, k );
//归一化
Mat dst_norm, dst_norm_scaled;
normalize( dst, dst_norm, 0, 255, NORM_MINMAX, CV_32FC1, Mat() );
convertScaleAbs( dst_norm, dst_norm_scaled );
//用圆标出角点
for( int i = 0; i < dst_norm.rows ; i++ )
{
for( int j = 0; j < dst_norm.cols; j++ )
{
if( (int) dst_norm.at<float>(i,j) > thresh )
{
circle( dst_norm_scaled, Point(j,i), 5, Scalar(0), 2, 8, 0 );
}
}
}
namedWindow( corners_window );
imshow( corners_window, dst_norm_scaled );
}
源码剖析:
源码路径: …opencv\sources\modules\imgproc\src\corner.cpp
Mat src = _src.getMat();
_dst.create( src.size(), CV_32FC1 );
Mat dst = _dst.getMat();
cornerEigenValsVecs( src, dst, blockSize, ksize, HARRIS, k, borderType );
可见cornerHarris内部调用了cornerEigenValsVecs函数
static void
cornerEigenValsVecs( const Mat& src, Mat& eigenv, int block_size,
int aperture_size, int op_type, double k=0.,
int borderType=BORDER_DEFAULT )
参数与上面的cornerHarris类似,就不多解释了
该函数内部先利用sobel算子求水平方向和竖直方向的微分
Mat Dx, Dy;
if( aperture_size > 0 )
{
Sobel( src, Dx, CV_32F, 1, 0, aperture_size, scale, 0, borderType );
Sobel( src, Dy, CV_32F, 0, 1, aperture_size, scale, 0, borderType );
}
else
{
Scharr( src, Dx, CV_32F, 1, 0, scale, 0, borderType );
Scharr( src, Dy, CV_32F, 0, 1, scale, 0, borderType );
}
然后初始化协方差矩阵cov(三通道,依次保存\(dx\times dx, dx\times dy, dy\times dy\))
for( ; j < size.width; j++ )
{
float dx = dxdata[j];
float dy = dydata[j];
cov_data[j*3] = dx*dx;
cov_data[j*3+1] = dx*dy;
cov_data[j*3+2] = dy*dy;
}
接下来对协方差矩阵进行在前述设定窗口内进行均值(盒式)滤波:
boxFilter(cov, cov, cov.depth(), Size(block_size, block_size),Point(-1,-1), false, borderType );
if( op_type == MINEIGENVAL )
calcMinEigenVal( cov, eigenv );
else if( op_type == HARRIS )
calcHarris( cov, eigenv, k );
else if( op_type == EIGENVALSVECS )
calcEigenValsVecs( cov, eigenv );
利用滤波后的协方差矩阵求取特征值和特征向量,根据设定不同的op_type调用不同的函数计算,以EIGENVALSVECS为例,调用calcEigenValsVecs()函数
static void calcEigenValsVecs( const Mat& _cov, Mat& _dst )
{
Size size = _cov.size();
if( _cov.isContinuous() && _dst.isContinuous() )
{
size.width *= size.height;
size.height = 1;
}
for( int i = 0; i < size.height; i++ )
{
const float* cov = _cov.ptr<float>(i);
float* dst = _dst.ptr<float>(i);
//调用该函数计算2x2协方差矩阵的特征值和特征向量
eigen2x2(cov, dst, size.width);
}
}
该函数中调用eigen2x2()函数计算每个像素点处协方差矩阵的2个特征值和2个特征向量,协方差矩阵为如下形式,数据都保存在cov的三个通道中:
static void eigen2x2( const float* cov, float* dst, int n )
{
for( int j = 0; j < n; j++ )
{
double a = cov[j*3];
double b = cov[j*3+1];
double c = cov[j*3+2];
double u = (a + c)*0.5;
double v = std::sqrt((a - c)*(a - c)*0.25 + b*b);
//计算两个特征值l1,l2
double l1 = u + v;
double l2 = u - v;
//计算特征值l1对应的特征向量
double x = b;
double y = l1 - a;
double e = fabs(x);
if( e + fabs(y) < 1e-4 )
{
y = b;
x = l1 - c;
e = fabs(x);
if( e + fabs(y) < 1e-4 )
{
e = 1./(e + fabs(y) + FLT_EPSILON);
x *= e, y *= e;
}
}
double d = 1./std::sqrt(x*x + y*y + DBL_EPSILON);
//保存特征值l1及其对应的特征向量
dst[6*j] = (float)l1;
dst[6*j + 2] = (float)(x*d);
dst[6*j + 3] = (float)(y*d);
//计算特征值l2对应的特征向量
x = b;
y = l2 - a;
e = fabs(x);
if( e + fabs(y) < 1e-4 )
{
y = b;
x = l2 - c;
e = fabs(x);
if( e + fabs(y) < 1e-4 )
{
e = 1./(e + fabs(y) + FLT_EPSILON);
x *= e, y *= e;
}
}
d = 1./std::sqrt(x*x + y*y + DBL_EPSILON);
//保存特征值l2及其对应的特征向量
dst[6*j + 1] = (float)l2;
dst[6*j + 4] = (float)(x*d);
dst[6*j + 5] = (float)(y*d);
}
}
求得2个特征值α、β和2个特征向量之后,就是要利用特征值构建特征表达式,通过表达式的值( (αβ) - k(α+β)^2 )来区分角点,k的值通常设置为0.04:
for( int j = 0; j < src_gray.rows; j++ )
{ for( int i = 0; i < src_gray.cols; i++ )
{
float lambda_1 = myHarris_dst.at<Vec6f>(j, i)[0];
float lambda_2 = myHarris_dst.at<Vec6f>(j, i)[1];
Mc.at<float>(j,i) = lambda_1*lambda_2 - 0.04f*pow( ( lambda_1 + lambda_2 ), 2 );
}
}
代码中利用 minMaxLoc( Mc, &myHarris_minVal, &myHarris_maxVal, 0, 0, Mat() ); 函数获取特征表达式的最大值min和最小值max,通过选取不同的阈值min<=thresh<=max,来指定大于阈值thresh的表达式值对应的点为检测出的角点。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号