对极几何
参考自:视觉SLAM14讲、鲁鹏《计算机视觉》
对极几何
对极几何是两幅视图之间内在的射影几何,它独立于景物结构,只依赖于摄像机的内参数和相对姿态。
极几何
极几何描述了同一场景或者物体的两个视点图像间的几何关系
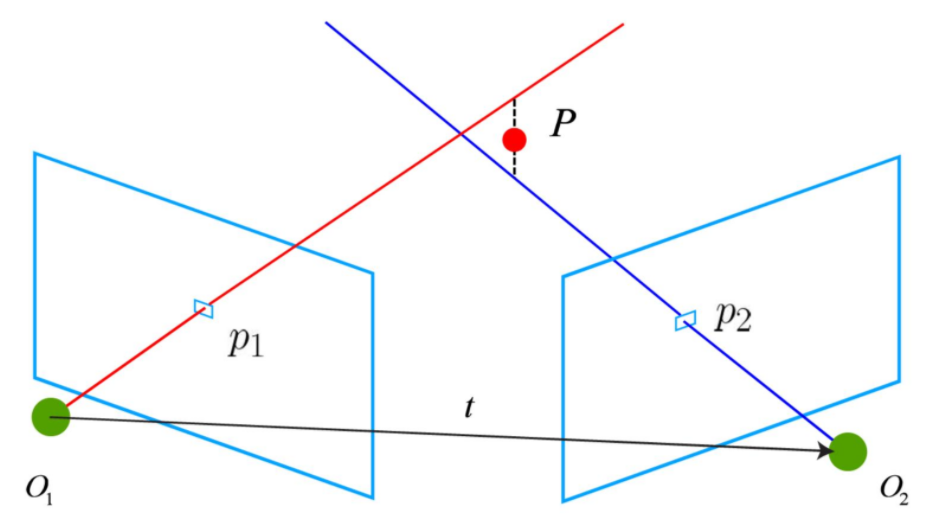
假设已经从两张图像中得到了一对配对好的特征点,希望求取两帧图像\(I_1,I_2\)之间的运动,假设第一帧到第二帧的运动为\(R,t\),\(O_1,O_2\)是两个摄像机中心,\(I_1\)中有一个特征点\(p_1\),在\(I_2\)中对应特征点\(p_2\),两者是通过特征匹配得到的。如果匹配正确,说明它们是同一个空间点在两个成像平面上的投影
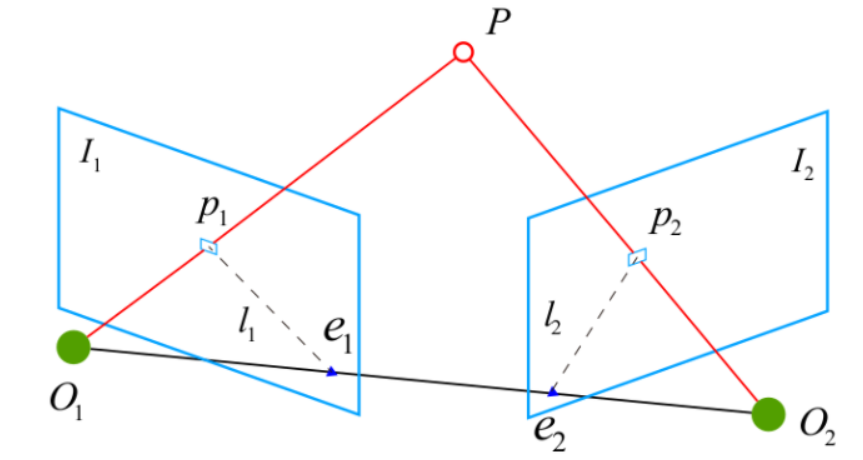
- 极平面:过点\(P\),\(O_1\)与\(O_2\)的平面
- 基线:\(O_1\)与\(O_2\)的连线
- 极线:极平面与成像平面的交线\(l_1,l_2\)
- 极点:基线与成像平面的交点\(e_1,e_2\)
性质:
- 极平面相交于基线
- 极线相交于极点
- \(p\)的对应点在极线\(l'\)上
- \(p'\)的对应点在极线\(l\)上
特例:平行视图
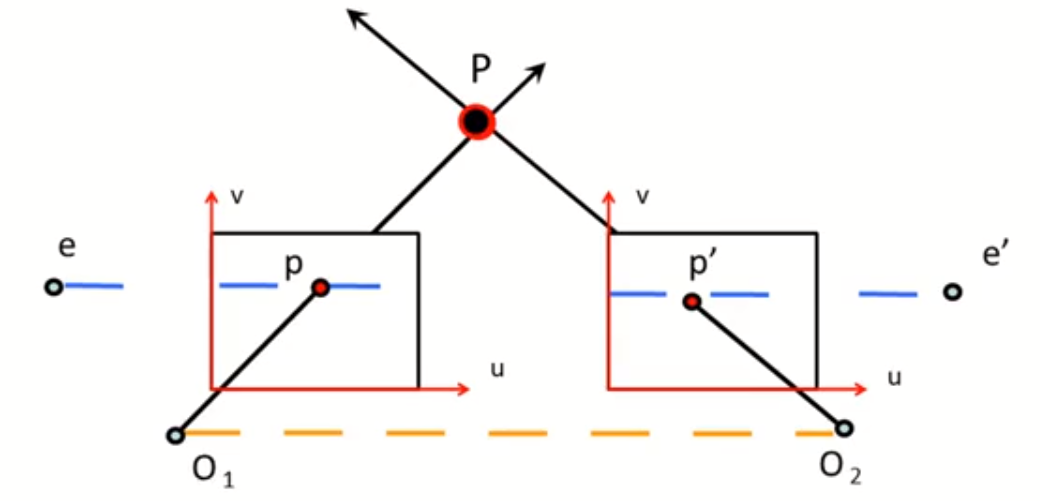
- 两个图像平面平行
- 基线平行于图像平面,极点\(e\)和\(e'\)位于无穷远处
- 极线平行于图像坐标系的\(u\)轴
特例2:前向平移(无旋转)
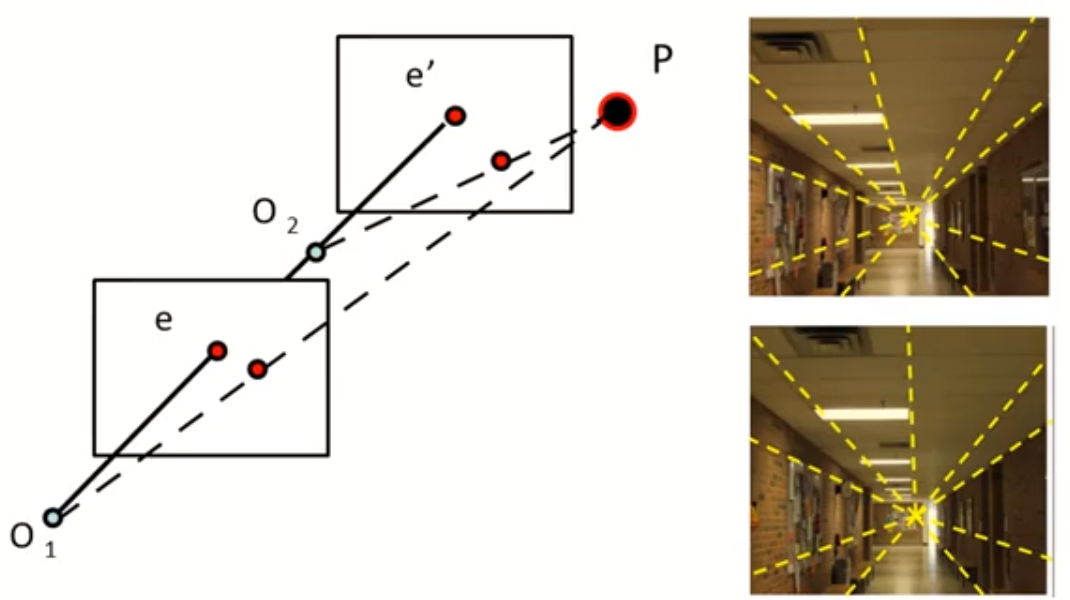
两幅图上极点位置相同,极点称作展开焦点
对应关系:已知一个图像中的\(p\)点,如何在另外一个图像中找到\(p'\)点?
通过极几何约束,将搜索范围缩小到对应的极线上
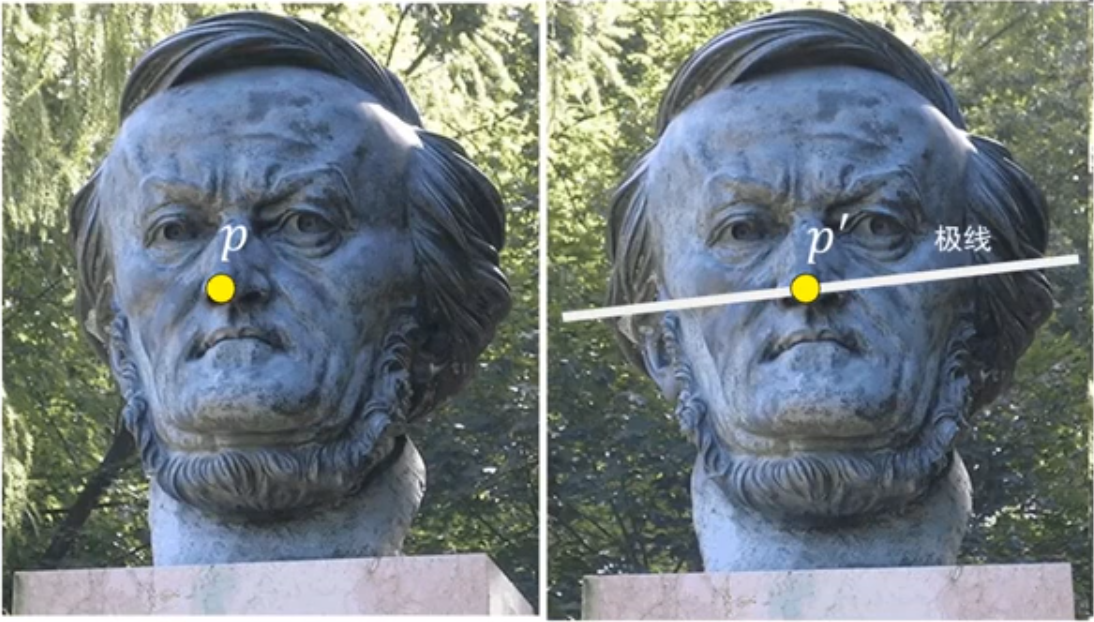
从第一帧角度看,射线\(\vec{O_1p_1}\)是某个像素可能出现的空间位置——因为该射线上所有点都会投影到同一个像素点。同时,如果不知道P的位置,那么在第二幅图上看时,连线\(\vec{e_2p_2}\)(第二幅图中的极线)就是P可能出现的投影位置,也就是射线\(\vec{O_1p_1}\)在第二个相机中的投影。
由于通过特征点匹配确定了\(p_2\)的像素位置,所有能够推断\(P\)的空间位置以及相机运动。
基础矩阵和本质矩阵
在第一帧的坐标系下,设P在相机坐标系下,坐标为\(P=[X,Y,Z]^T\)
\(p_1,p_2\)的像素坐标(单位像素):\(s_1p_1=KP,s_2p_2=K(RP+t)\)
有时使用齐次坐标表示像素点。在使用齐次坐标时,一个向量将等于它自身乘任意非零常数。这通常用于表达一个投影关系。例如,\(s_1p_1\)和\(p_1\)成投影关系,他们在齐次坐标系下的意义是相等的。称这种相等关系为尺度意义下的相等。
那么上述两个投影关系可写为\(p_1\simeq KP, p_2\simeq K(RP+T)\)
其归一化平面坐标:\(x_1=K^{-1}p_1,x_2=K^{-1}p_2\)
得到:\(x_2\simeq Rx_1+T\) 这里的x是齐次坐标,等式表达了一个齐次关系
两边同乘\(T^\prime\),相当于与它做外积,得到的结果和它、\(x_2\)都垂直。因此再左乘\(x_2^T\),就得到了0
最终得到\(x_2^TT^\prime Rx_1 = 0\)
中间部分写作E矩阵,称为本质矩阵:
带入\(p_1,p_2\):
中间部分写作F矩阵,称为基础矩阵:
\(T^\prime\)是\(T\)的反对称矩阵。
这两个式子称为对极约束。根据对极约束,估计R,t的方法为:
- 根据匹配点的位置,求出E或者F
- 根据E或者F,求出R,T
性质:
本质矩阵:
- \(p_1\)对应的极线是\(l_2\)\((l_2 = Ep_1)\)
- \(p_2\)对应的极线是\(l_1(l_1=E^Tp_2)\)
- \(Ee_1=0\)与\(E^Te_2=0\)
- \(E\)是奇异的(秩为2),奇异值必定是\([\sigma,\sigma,0]^T\)的形式
- \(E\)有5个自由度(3旋转+3平移,\(det(E) = 0\)去掉一个自由度)
本质矩阵是两个标准相机相对关系的内参,换言之,给定两个已标定相机的相对位置关系,本质矩阵即被确定。
基础矩阵
- \(p_1\)对应的极线是\(l_2\)\((l_2 = Fp_1)\)
- \(p_2\)对应的极线是\(l_1(l_1=F^Tp_2)\)
- \(Fe_1=0\)与\(F^Te_2=0\)
- \(F\)是奇异的(秩为2)
- $F $有7个自由度(9 - 尺度无法确定 - \(det(F) = 0\))
基础矩阵是任意两个相机相对关系的内参,换言之,给定了两个相机的相对位置关系和相机内参,基础矩阵即被确定。
基础矩阵的作用:已知\(F\),无需场景信息以及摄像机内、外参数,即可建立左右图像对应关系。
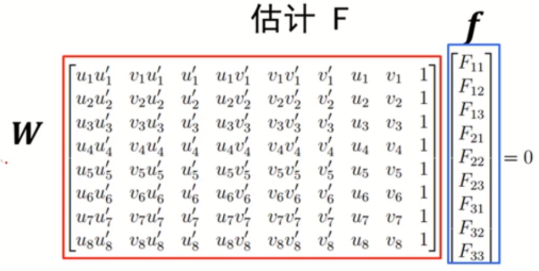
估计基础矩阵
F矩阵有7个自由度,理论上7个点即可求解F,但计算方法比较复杂
选取8组对应点
-
齐次系统\(Wf = 0\)
-
秩 = 8 \(\longrightarrow\) 存在唯一非零解
-
秩 > 8 \(\overset{最小二乘解}{\longrightarrow}\) \(\mathop {min}\limits_{f}||Wf|| \qquad s.t.||f||=1\) \(\overset{SVD}{\longrightarrow}\hat{F}\) f为W矩阵最小奇异值的右奇异向量,且\(||f||=1\)
但\(\hat{F}\)不是我们要求的基础矩阵,基础矩阵的秩为2,但\(\hat{F}\)通常秩为3,即\(\hat{F}\)满秩
寻找F最小化 \(||F-\hat{F}||_F\qquad\qquad s.t. det(F)=0\)
八点算法
-
构建W矩阵
-
对W矩阵进行奇异值分解求\(\hat{F}\), f为W矩阵最小奇异值的右奇异向量,且\(||f|| = 1\)
-
执行秩为2的约束\(\longrightarrow\)F
\(SVD(\hat{F}) = U\left[\begin{matrix} s_1 & 0 & 0\\0 & s_2 & 0\\0 & 0 & s_3 \end{matrix} \right]V^T \longrightarrow F = U \left[ \begin{matrix} s_1 & 0 & 0\\0 & s_2 & 0\\0 & 0 & 0 \end{matrix} \right]V^T\)
存在的问题
由于W中各个元素的数值差异过大,且SVD分解有数值计算问题,所以八点法精度较低
改进: 归一化八点法(精度高)
对每幅图像施加变换T(平移和缩放),让其满足如下条件:
- 原点 = 图像上点的重心
- 各个像点到坐标原点的均方根距离等于\(\sqrt{2}\)(或者均方距离等于2)
步骤:
- 分别计算左图和右图的T和T’
- 坐标归一化:\(q_i = Tp_i \qquad q_i' = T'p_i'\)
- 通过八点法计算矩阵\(F_q\)
- 逆归一化 \(F = T'^TF_qT\)
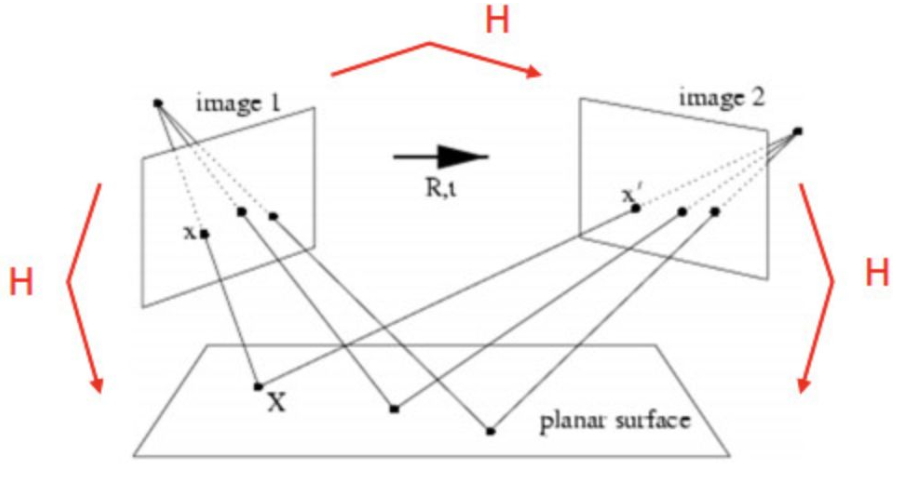
单应性矩阵
单应(Homography)是射影几何中的概念,又称为射影变换。它把一个射影平面上的点(三维齐次矢量)映射到另一个射影平面上,并且把直线映射为直线,具有保线性质。
总的来说,单应是关于三维齐次矢量的一种线性变换,可以用一个\(3×3\)的非奇异矩阵\(H\)表示
这是一个齐次坐标的等式,\(H\)乘以一个非零的比例因子上述等式仍然成立,即\(H\)是一个\(3×3\)齐次矩阵,具有8个未知量。
假设已经取得了两图像之间的单应,则可单应矩阵\(H\)可以将两幅图像关联起来
其中\((u_1,v_1,1)^T\)表示图像1中的点,\((u_2,v_2,1)^T\)表示图像2中的点,也就是可以通过单应性矩阵\(H\)将图像2变换到图像1,因此也很多实际应用,例如:图像的校正、对齐以及在SLAM中估计两个相机间的运动。
设图像\(I_1\)和\(I_2\)有一对已经匹配好的特征点\(p_1\)和\(p_2\),这个特征点落在平面\(P\)上,平面在第一个相机坐标系下的单位法向量为n,距离第一个相机中心(坐标原点)为d,设这个平面满足方程:
整理得:
又因为像素点\(p_2\)的位置为:\(p_2\simeq K(RP+t)\)
得:
于是得到了一个直接描述图像坐标\(p_1\)和\(p_2\)之间的变换,中间部分记作\(H\),于是
它的定义与旋转,平移及平面的参数有关。与基础矩阵F类似,单应矩阵H也是一个\(3\times 3\)的矩阵,求解思路与F类似,同样可以根据匹配点计算H,然后分解以计算旋转和平移。把上式展开得:
注意,这里依然不是等号,所以H矩阵也可以乘任意非零常数。
在实际处理中可以令\(h_9 = 1\)。根据第3行去掉这个非零因子,有
整理得:
这样一组匹配点对就可以构造出两项约束(事实上有三项约束,但是因为线性相关,只取前两个),于是自由度为8的单应矩阵可以通过4对匹配特征点算出。
这种做法把\(H\)看作向量,通过解该向量的线性方程来恢复\(H\),又称直接线性变换法。与本质矩阵相似,求出单应矩阵以后需要对其进行分解,才可以得到相应的旋转矩阵R和平移向量t。
单应性在SLAM中具有重要意义,当特征点共面或者相机发生纯旋转时,基础矩阵的自由度下降,这就出现了所谓的退化(degenerate)。现实中的数据包含一些噪声,这是如果继续使用八点法求解基础矩阵,基础矩阵多出来的自由度将会主要由噪声决定。为了能够避免退化现象造成的影响,通常我们同时估计基础矩阵F和单应矩阵H,选择重投影误差比较小的那个作为最终的运动估计矩阵。
存在的问题
尺度不确定性:
对t长度的归一化,直接导致了单目视觉尺度的不确定性。例如,程序中输出的t第一维为0.82,但究竟是米还是厘米是无法确定的。因为对t乘以任意比例常数后,对极约束依然成立。
在单目视觉中,我们对两张图像的t归一化相当于固定了尺度,以这时的t为单位1,计算相机运动和特征点的3D位置。这称为单目SLAM的初始化。在初始化后就可以用3D-2D计算相机运动了。初始化之后的轨迹和地图的单位就是初始化时固定的尺度。
因此,单目SLAM有一步不可避免的初始化。初始化的两张图像必须有一定程度的平移,而后的轨迹和地图都将以此步的平移为单位。
除了对t进行归一化,还可以令初始化时所有的特征点平均深度为1,也可以固定一个尺度。相比于令t长度为1的做法,把特征点深度归一化可以控制场均的规模大小,让数值更稳定。
初始化纯旋转问题:
从F分解到R,t的过程中,如果相机发生的是纯旋转,导致t为0,那么得到的F也将为0,导致无从求解R。不过此时可以依靠H求取旋转,但仅有旋转时,我们无法用三角测量估计特征点的空间位置。所以,单目初始化不能只有纯旋转,必须要有一定程度的平移。
多于8对点的情况:
计算最小二乘解,存在误匹配时使用RANSAC来求。
三角测量
在得到运动之后,下一步需要用相机的运动估计特征点的空间位置。单目SLAM中,仅通过但张图像无法获得像素的深度信息,需要通过三角测量的方法估计图点的深度。
三角测量是指,通过不同的位置对同一个路标点进行观察,从观察到的位置推断路标点的距离。
考虑图像\(I_1,I_2\),以左图为参考,右图的变换矩阵为T。相机光心为\(O_1\)和\(O_2\),在\(I_1\)中有特征点\(p_1\),在\(I_2\)中有特征点\(p_2\)。理论上直线\(O_1p_1\)和\(O_2p_2\)在场景中会相交于一点P,该点即两个特征点所对应的地图点在三维场景中的位置。然而由于噪声的影响,这两个点往往无法相交,因此可以通过最小二乘法求解。
设\(x_1,x_2\)为两个特征点的归一化坐标,那么它们满足:
已知\(R,t\),想求解两个特征点的深度\(s_1,s_2\)。先对上式左乘一个\(x_2^\wedge\),得到
该式左侧为0,右侧可以看成是一个\(s_2\)的方程,可以根据它直接求得\(s_2\),进而求得\(s_1\),于是就得到了两帧下的深度,确定了它们的空间坐标。由于噪声的存在,R,t不一定准确使得上式为0,更常见的做法是求最小二乘解。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号