图像处理坐标系转换参考表
图像处理坐标系转换
图像处理涉及以下四个坐标系:
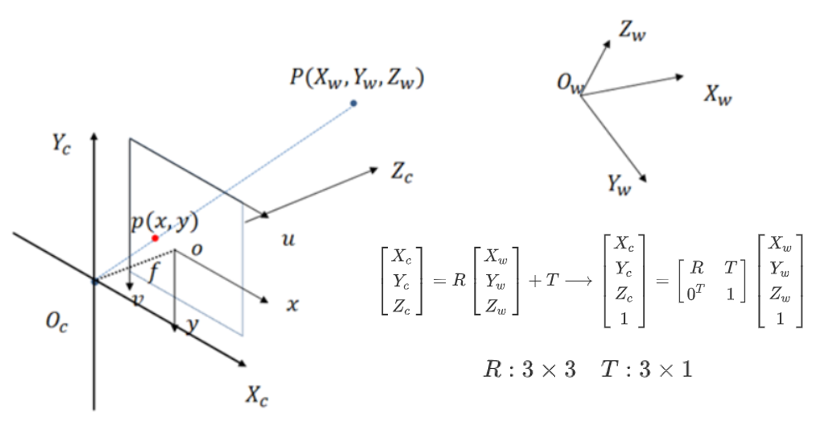
\(O_w-X_wY_wZ_w\):世界坐标系,描述相机位置,单位mm
\(O_c-X_cY_cZ_c\):相机坐标系,光心为原点,单位mm
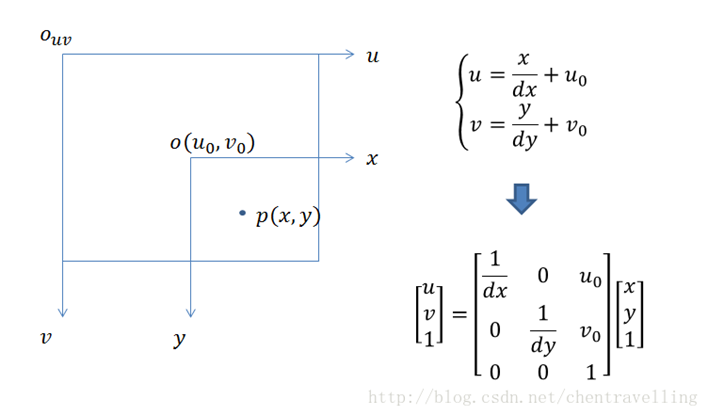
\(O-xy\):图像坐标系,光心为图像中点,单位mm
\(uv\):像素坐标系,原点为图像左上角,单位pixel
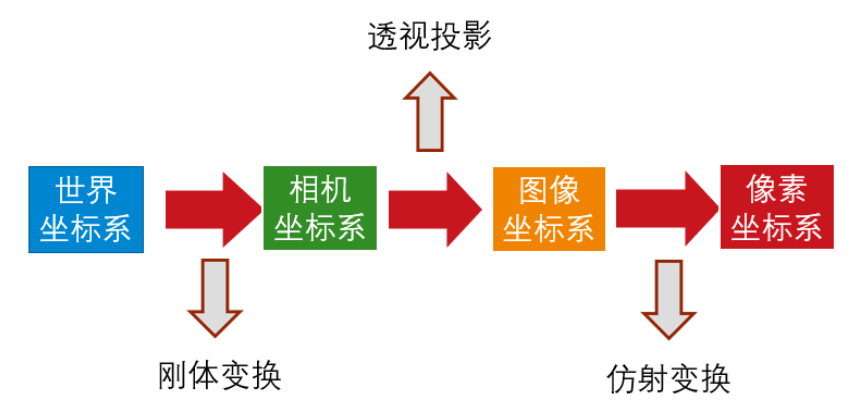
世界坐标系\(\longrightarrow\)摄像机坐标系
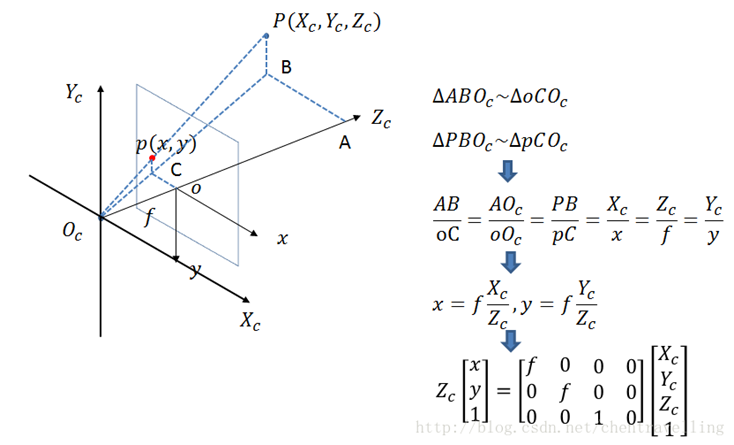
相机坐标系\(\longrightarrow\)图像坐标系
图像坐标系\(\longrightarrow\)像素坐标系
整体坐标系转换:
\[z_c \left[
\begin{matrix}
u\\v\\1
\end{matrix}
\right]
=
\left[
\begin{matrix}
\frac{1}{dx} & 0 & u_0\\
0 & \frac{1}{dy} & v_0\\
0 & 0 & 1
\end{matrix}
\right]
\left[
\begin{matrix}
f & 0 & 0 & 0\\
0 & f & 0 & 0\\
0 & 0 & 1 & 0
\end{matrix}
\right]
\left[
\begin{matrix}
R & t \\
0^T & 1
\end{matrix}
\right]
\left[
\begin{matrix}
x_w\\y_w\\z_w\\1
\end{matrix}
\right]
\]
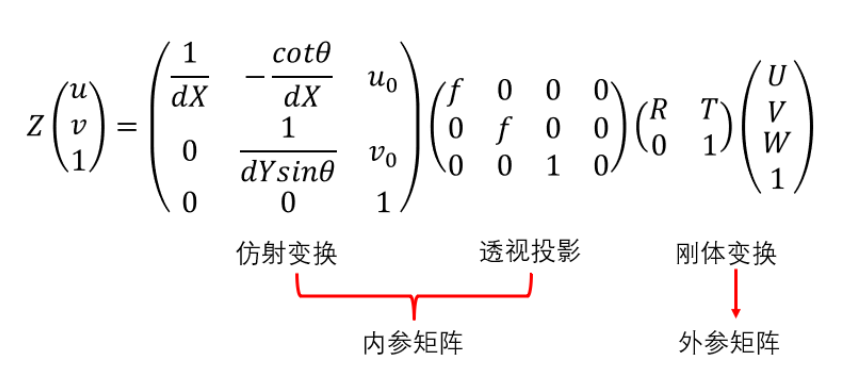
由于制造工艺的精度问题,会有一定误差,同样的,感光阵列的法向和相机光轴也不是完全重合,即可以看作成像平面与光轴不垂直。
所以
\[u = u_0 + \frac{x_d}{dx} - \frac{y_dcot\theta}{dx}\\
v = v_0 + \frac{y_d}{dysin\theta}
\]
则整体坐标系转换进一步可以写为:
\[z_c \left[
\begin{matrix}
u\\v\\1
\end{matrix}
\right]
=
\left[
\begin{matrix}
\frac{1}{dx} & -\frac{cot\theta}{dx} & u_0\\
0 & \frac{1}{dysin\theta} & v_0\\
0 & 0 & 1
\end{matrix}
\right]
\left[
\begin{matrix}
f & 0 & 0 & 0\\
0 & f & 0 & 0\\
0 & 0 & 1 & 0
\end{matrix}
\right]
\left[
\begin{matrix}
R & t \\
0^T & 1
\end{matrix}
\right]
\left[
\begin{matrix}
x_w\\y_w\\z_w\\1
\end{matrix}
\right]
\]

 浙公网安备 33010602011771号
浙公网安备 33010602011771号