Refractive laser triangulation and photometric stereo in underwater environment学习笔记
前半部分推导了水下虚拟成像和现实坐标之间的关系,后面没看懂,等以后补上。
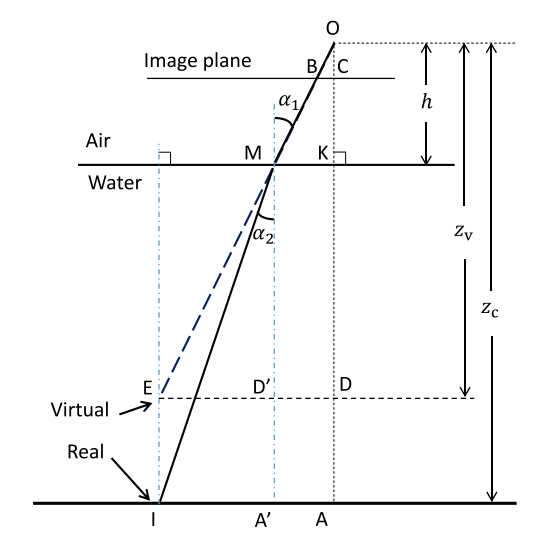
相机处于防水外壳中。 相机的光轴垂直于外壳接口。 根据透视投影,可以将虚拟点设置为沿OM的延长线的任何位置。 为了简化计算,我们假设虚拟点在真实点的正上方,并且两个点的连接线垂直于外壳接口。
该模型的特征在于以下参数:
\(h\):透视中心\(O\)与外壳接口之间的距离;
\(α_1\):入射角;\(α_2\):在水中的折射角;
\(I\):真实物体点\((x_c,y_c,z_c)\)(在相机坐标系中);
\(E\):与点\(I\)相关的虚拟对象点\((x_v,y_v,z_v)\)。
在此模型中,显然存在以下关系:\(x_c = x_v,y_c = y_v\)。
假设光轴,入射光线和折射光线都在同一平面上。 根据斯涅耳的折射定律,折射率n可以写成:
根据几何关系:
在图中存在如下的几何关系:
\(ED = IA,ED' = IA',MD'=KD,MA'=KA, AA'=DD'=MK\)
因此折射率\(n\)可以写为
因为\(z_v = OD,z_c = OA\),则可以由\(OA\)和\(OD\)的几何关系来估计“虚拟现实”关系,
他们有一个共同的因素\(\longrightarrow OK\)
其中\(OK\)表示镜头玻璃距离\(h\),下面找到\(KA\)和\(KD\)的几何关系
又因为\(KD = OD - OK, IA' = IA - AA' = IA - MK\),因此\(KA\)可以被表示为
因此\(OA\)可以表示为
所以,\(z_v\)和\(z_c\)的关系可以表示为
基于透视相机模型,点\(I\)和\(E\)都与点\(B(x_u,x_v)\)有关(在归一化坐标系中)。它们之间的关系可以表示为:
\(BC\)表示了点\(B\) 到图像平面中心\(C\)的距离,并且在正交化图像坐标系中,\(OC\) = 1,在这个条件下,\(MK\)可以表示为
\(IA\)表示从点\(I\)到\(XY\)平面中心\(A\)的距离
最后,结合以上等式,该折射模型中的“虚拟-真实”关系可以表示为:

 浙公网安备 33010602011771号
浙公网安备 33010602011771号